@tom Thanks it worked! Out of curiosity, was it written somewhere and I missed that?
Latest posts made by LR
-
RE: 5G Modem not workingposted in Cellular Modems
-
RE: 5G Modem not workingposted in Cellular Modems
@tom Here is the output for lsbusb -t

And here the one for ifconfig
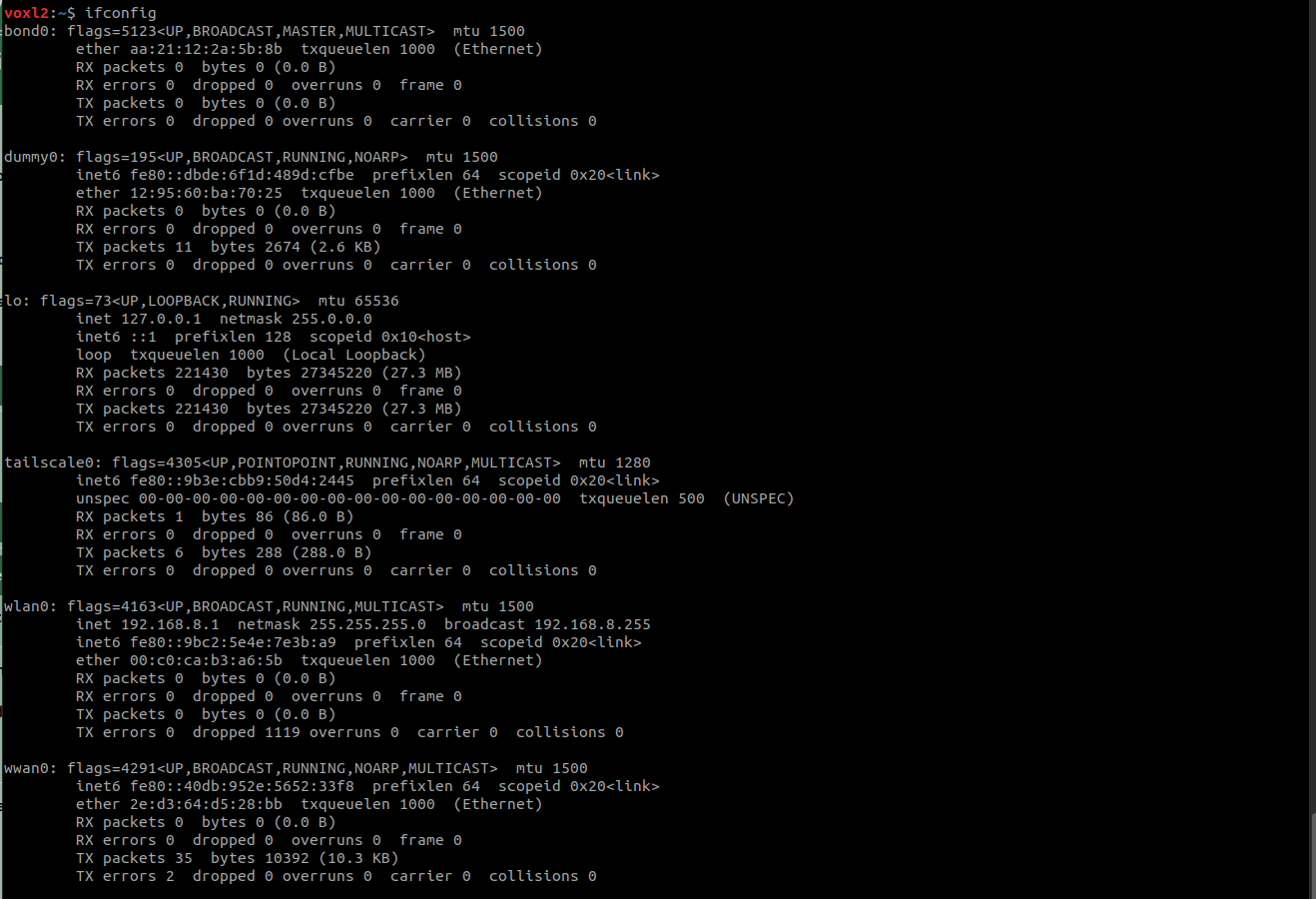
it says that the voxl-modem service is up and running but it is not connected to the internet
-
5G Modem not workingposted in Cellular Modems
Hello,
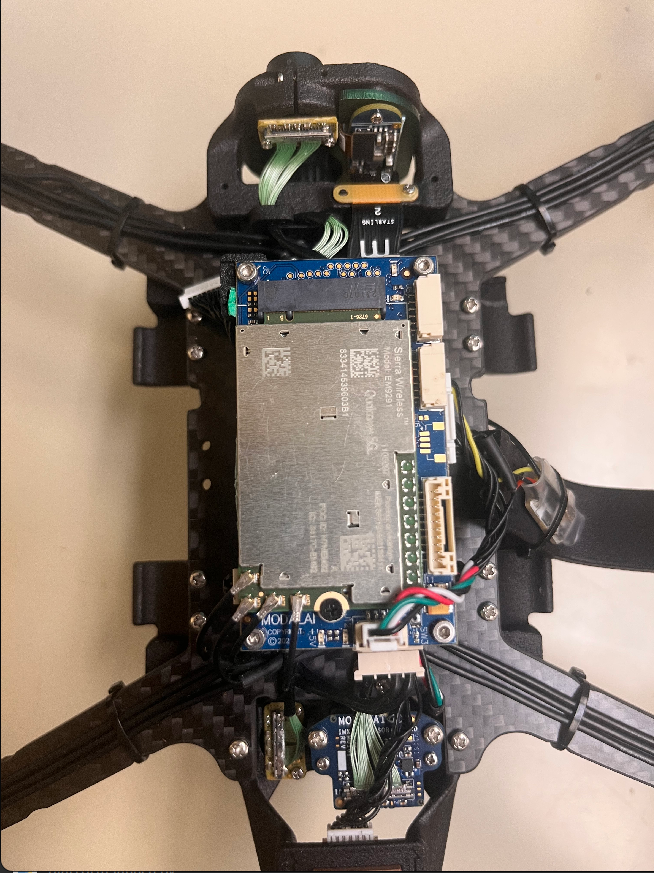
I am using a Starling V2 Max with voxl-suite 1.4.2 and a Qualcomm 5G module (pictured below). I have inserted a Mint Mobile SIM card and followed the configuration steps from ModalAI's documentation.
During setup, I selected:
1️⃣ V2 as the modem (option 1)
2️⃣ No Modallink (option 2)
3️⃣ T-Mobile APN: fast.t-mobile.com (since Mint uses T-Mobile's network) (option 4)However, the system fails to detect /dev/ttyUSB2, and running:
ls /dev | grep ttyUSB
returns nothing—indicating that no /dev/ttyUSB devices are available.
Any insights or troubleshooting suggestions would be appreciated.
Attached is a picture of the 5G modem for reference.
Thank you in advance
-
Factory reset Starling 2posted in VOXL SDK
I have a Starling 2 Max with SDK 1.3.5. I have recently tried to install opencv to do some object detection with aruco markers but I believe there was some incompatibility issues and now the qvio doesn't work. I was thinking on doing a factory reset and I was wondering how can I do it and what are the calibration and configuration file I should copy to have the system behaving as before.
-
Switching between cameras in QGCposted in Image Sensors
Hello,
I have a Starling v2 max with VOXL2 and when I connect to QGround Control I can see the images sent by the front camera. I want to switch between those and the images coming from the camera facing down, how can I do that?
-
RE: problems installing voxl-mpa-to-ros2posted in ROS
@LR I removed and reinstalled voxl-mpa-to-ros2 and that is working now, for voxl-mpa-to-ros I still have the same problem
-
RE: problems installing voxl-mpa-to-ros2posted in ROS
@Zachary-Lowell-0 Hi, thank you for your response! I've tried to installed it directly but when I try to access it with ros2 run voxl_mpa_to_ros2 voxl_mpa_to_ros2 it doesn't find the node, I also checked under opt/ros/foxy/mpa_to_ros2/install and the package is not there...

I tried again to install it on the docker container with what @jmltt told me and now I have this problem
Lastly I tried also to install voxl_mpa_to_ros for melodic but in this case the package contains just the launch file and not the voxl_mpa_to_ros_node so again I cannot call the function

Sorry for all this...
-
problems installing voxl-mpa-to-ros2posted in ROS
Hello,
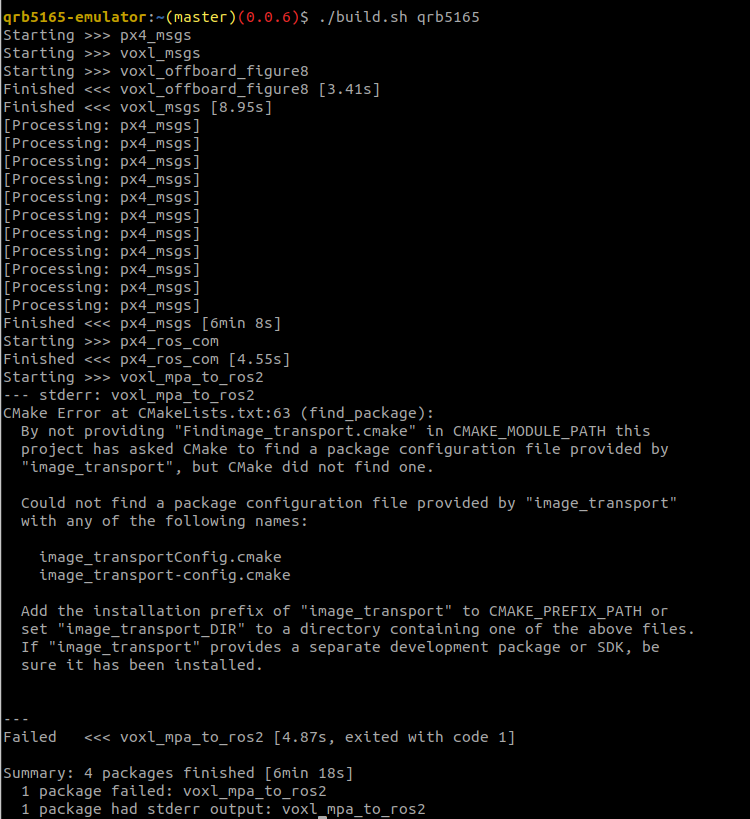
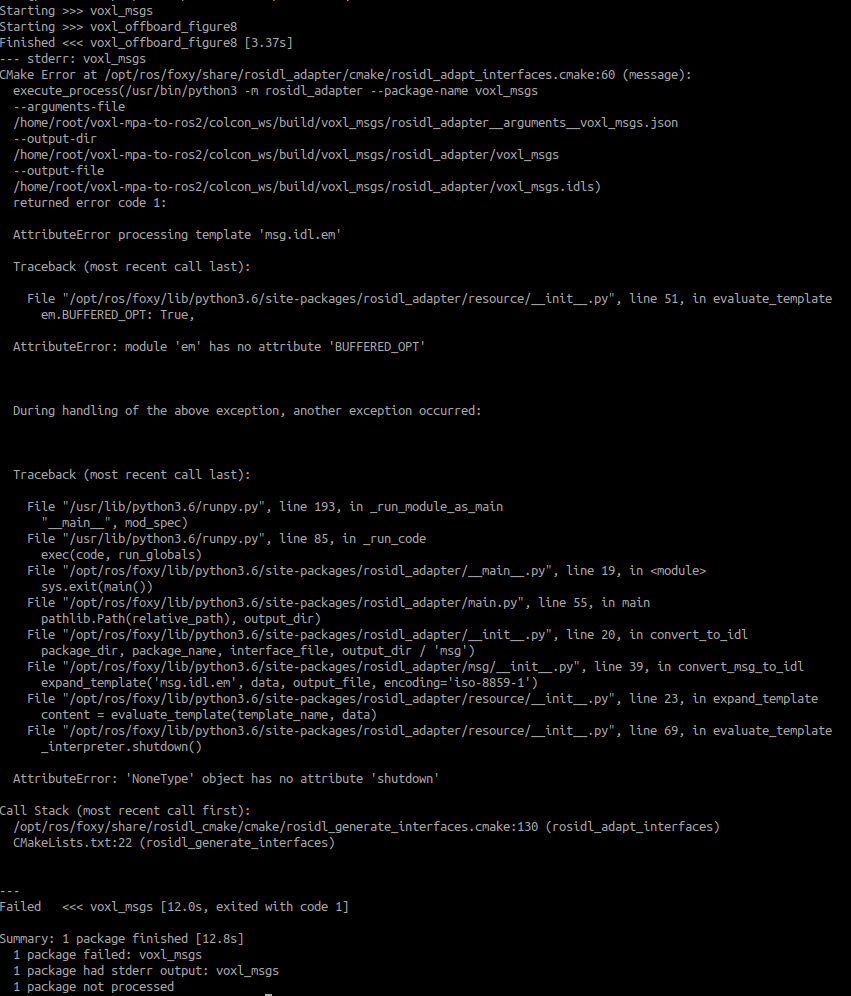
I'm following this guide https://docs.modalai.com/ros2-installation-voxl2/ to build the voxl-mpa-to-ros2 pkg and push it into VOXL2. I'm facing some problems with the instructions, in detail, I succeeded into creating the qrb5165-emulator image, then I can install the dependencies with './install_build_deps.sh qrb5165 dev', but when I try to run the build.sh file the voxl_msgs pkg fail to compile. Below the error I obtain. What am I doing wrong?
-
RE: GPS-denied offboard mode and MAVROS configuration on VOXLposted in Support Request Format for Best Results
When I attempt to use my drone for GPS-denied applications indoors with QGroundControl (QGC), I am unable to switch to offboard mode. However, it works perfectly fine outdoors. My question is whether there are specific PX4 parameters I need to change or if my Visual Inertial Odometry (VIO) is not functioning correctly.
-
RE: Seeker receiver not bindingposted in Ask your questions right here!
Update: I actually understood why I cannot bind, the receiver is not a Spektrum but a FrSky R-XSR Receiver, what should I do? Should I buy a FrSky transmitter or should I change the receiver to a Spektrum one? What do you suggest?