@Eric-Katzfey Thanks! I am able to do a basic HITL now. However I get this error message on QGC

I see that the flight mode on QGC is always "unknown", is this expected?


@Eric-Katzfey Thanks! I am able to do a basic HITL now. However I get this error message on QGC
I see that the flight mode on QGC is always "unknown", is this expected?
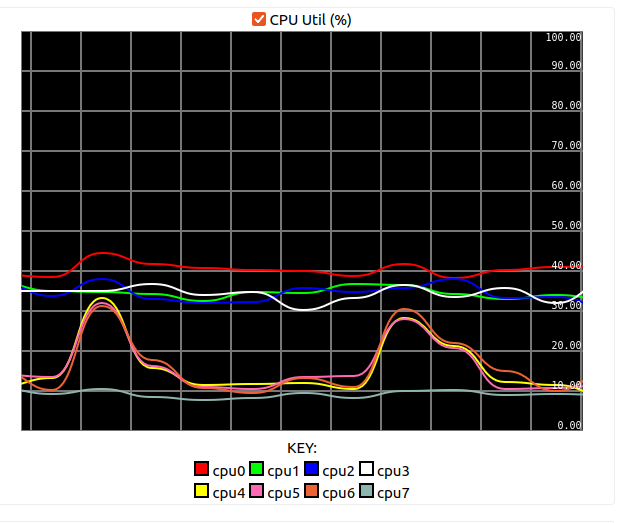
@tom Is there a way to voxl-logger the outputs from voxl-inspect-cpu and play it so that I can see the graphs on voxl-portal? Currently I can only voxl-inspect-cpu or view the graphs in real-time on voxl-portal, but I would like to record the data when the drone flies and review it post-flight
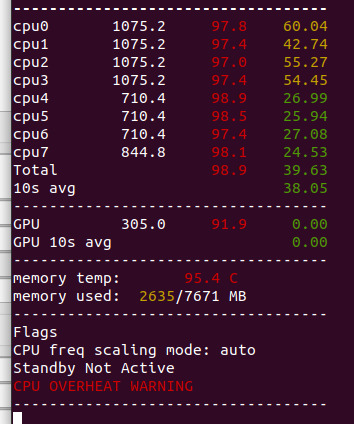
@Moderator oh I see, so to reduce overheating would it be recommended to use the default settings instead of limiting my process to cpu 4 to 7?
I realised that the default behaviour for cpu 0 to 3 on the VOXL2 is to run at a higher frequency (and utilisation) than cpu 4 to 7
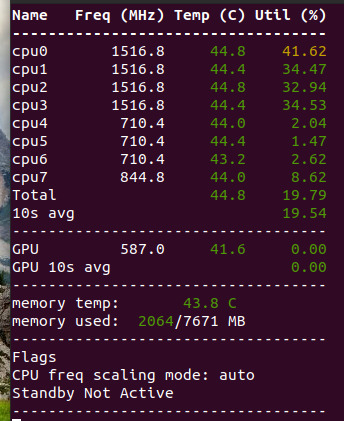
This happens even for a compute intensive process
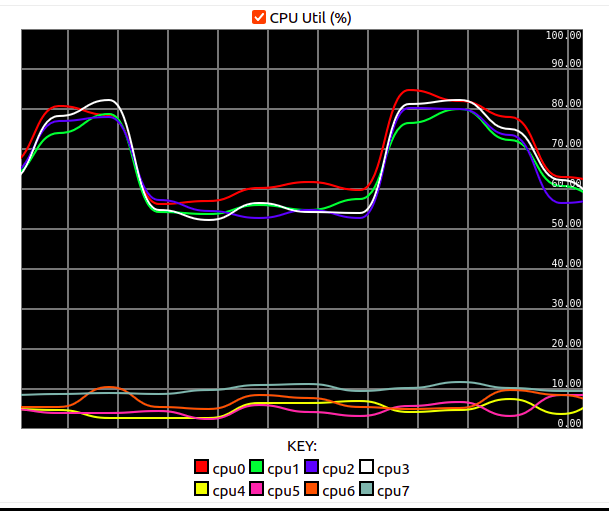
Would it help to limit my process to cpu 4 to 7 as such?
Or should I stick to the default, using all available cores?
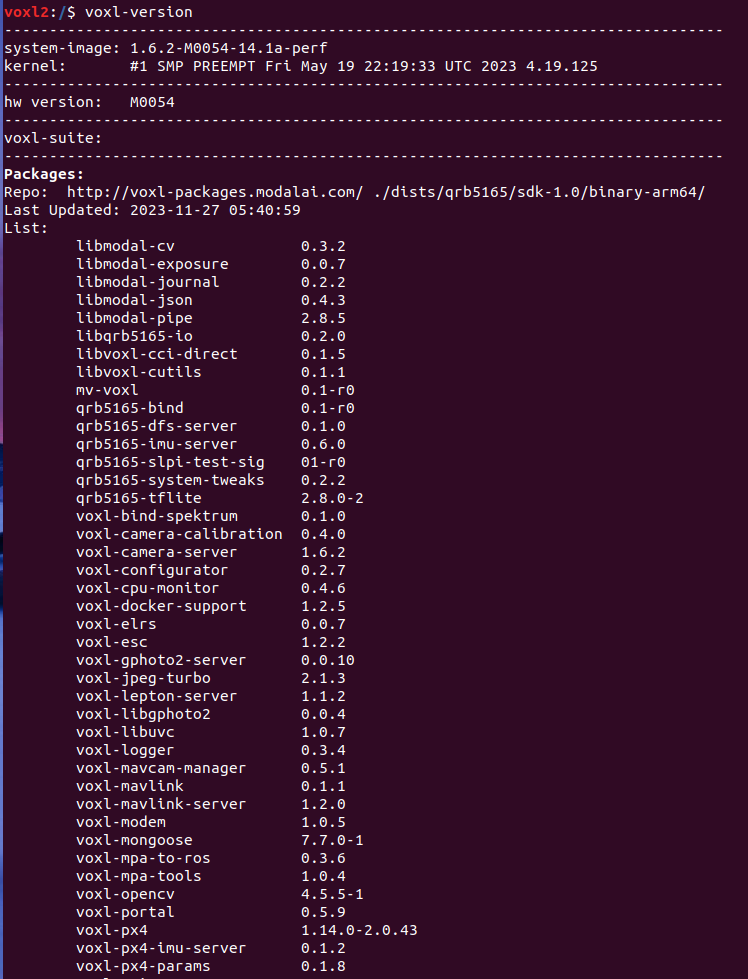
@Eric-Katzfey will this work with SDK 1.0.0 too? would like to stick with that version for now since we have been testing with this version for our project
@Eric-Katzfey I'm also unable to connect to QGC now (without HITL). On VOXL portal I can still see the camera and pointclouds, but not the status of the drone.
@Eric-Katzfey Yes I still get the same error after power cycle
@Zachary-Lowell-0 I was trying the MAVSDK example which didn't work but after trying the example, I can't run HITL anymore (which worked previously)... not sure what's the issue here?
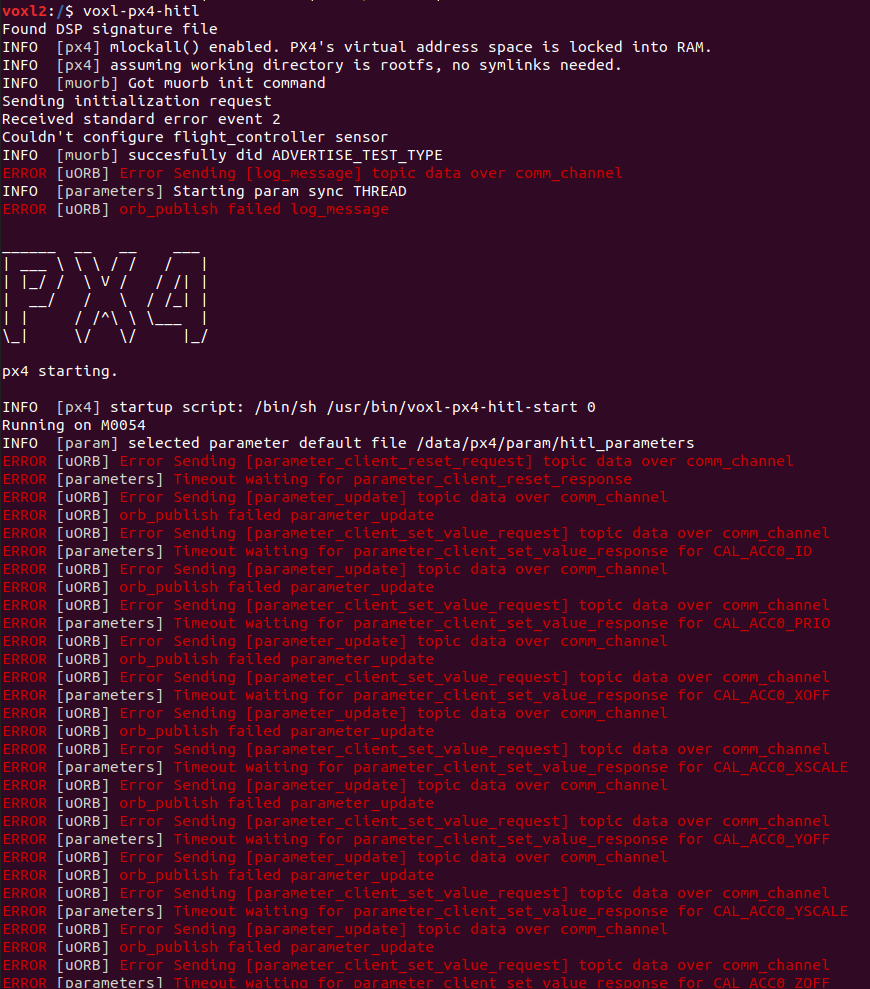
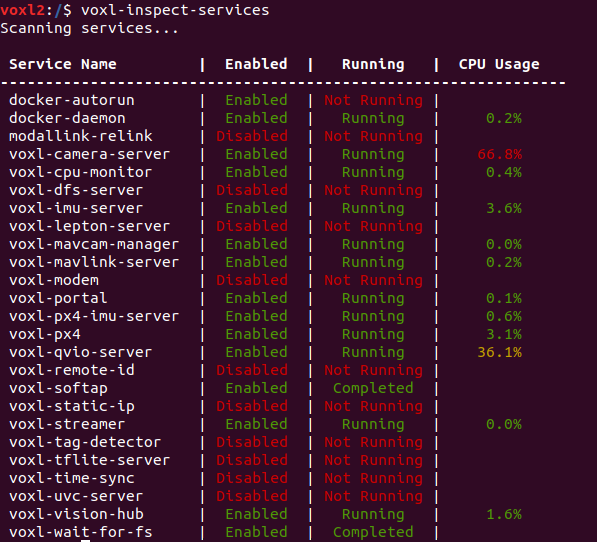
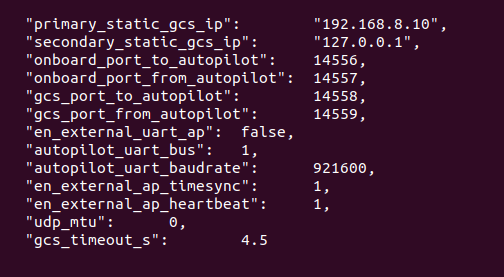
For SITL, I can connect to PX4 with MAVSDK using port 14540. However, for HITL, port 14540 or 14551 does not work. VOXL2 wifi is configured in AP mode, and I have connected my laptop to it. I have also checked that voxl-vision-hub and voxl-mavlink-server are running, and my config files are as such:
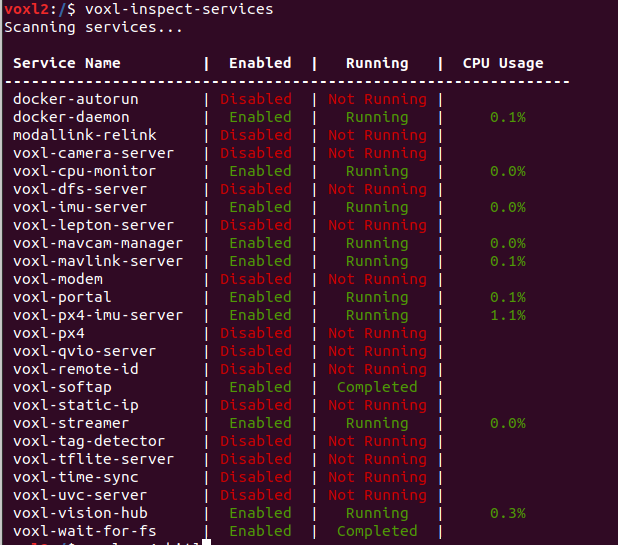
voxl-vision-hub

voxl-mavlink-server
How can I get HITL to work with MAVSDK running on my linux computer? Or does it only work when MAVSDK is running on VOXL2 like the example here https://docs.modalai.com/mavsdk/?
@Moderator @Zachary-Lowell-0 @Eric-Katzfey Thanks for your replies! I am looking to do multi-vehicle simulation so SITL would be ideal, but I would definitely try out HITL too (although that would be limited to only 1 vehicle in the simulation right?)
Is it possible to run SITL using ModalAI's version of the PX4 software? I am using this repo https://github.com/modalai/px4-firmware/ and followed the same steps as I would with PX4's Autopilot repo:
However, I recently discovered that there's the option to make modalai_voxl2 (instead of make px4_sitl_default), so I am not sure if I am actually using the ModalAI version. What is the correct way to do so?
I am unable to make modalai_voxl2 successfully:
$ make modalai_voxl2
-- PX4 version: v1.14.0-2.0.43-dev (1.14.0)
-- Found PythonInterp: /usr/bin/python3 (found suitable version "3.8.10", minimum required is "3")
-- PX4 config file: /home/xx/px4-firmware/boards/modalai/voxl2/default.px4board
-- PLATFORM posix
-- LINUX_TARGET y
-- TOOLCHAIN aarch64-linux-gnu
-- ROMFSROOT px4fmu_common
-- ROOTFSDIR /data/px4
-- PX4 config: modalai_voxl2_default
-- PX4 platform: posix
-- PX4 lockstep: disabled
-- The CXX compiler identification is unknown
-- The C compiler identification is unknown
-- The ASM compiler identification is unknown
-- Found assembler: /bin/aarch64-linux-gnu-gcc
CMake Error at CMakeLists.txt:219 (project):
The CMAKE_CXX_COMPILER:
/bin/aarch64-linux-gnu-g++
is not a full path to an existing compiler tool.
Tell CMake where to find the compiler by setting either the environment
variable "CXX" or the CMake cache entry CMAKE_CXX_COMPILER to the full path
to the compiler, or to the compiler name if it is in the PATH.
CMake Error at CMakeLists.txt:219 (project):
The CMAKE_C_COMPILER:
/bin/aarch64-linux-gnu-gcc
is not a full path to an existing compiler tool.
Tell CMake where to find the compiler by setting either the environment
variable "CC" or the CMake cache entry CMAKE_C_COMPILER to the full path to
the compiler, or to the compiler name if it is in the PATH.
CMake Error at CMakeLists.txt:219 (project):
The CMAKE_ASM_COMPILER:
/bin/aarch64-linux-gnu-gcc
is not a full path to an existing compiler tool.
Tell CMake where to find the compiler by setting either the environment
variable "ASM" or the CMake cache entry CMAKE_ASM_COMPILER to the full path
to the compiler, or to the compiler name if it is in the PATH.
-- Warning: Did not find file Compiler/-ASM
-- Configuring incomplete, errors occurred!
See also "/home/xx/px4-firmware/build/modalai_voxl2_default/CMakeFiles/CMakeOutput.log".
See also "/home/xx/px4-firmware/build/modalai_voxl2_default/CMakeFiles/CMakeError.log".
Error: /home/xx/px4-firmware/build/modalai_voxl2_default is not a directory
make: *** [Makefile:232: modalai_voxl2] Error 1