I resolved the problem by installing openmp from the voxl-packages site.
Best posts made by Lynn Koudsi
-
RE: Installing OpenCV-4.5 fails on VOXL Emulator Docker Image V1.7posted in Software Development
Latest posts made by Lynn Koudsi
-
RE: Not getting valid depth from stereo pointcloud dataposted in VOXL Flight
Hi Alex,
Thank you for the reply!
I've attached the stereo camera view, as well as disparity images. I think it shows enough features, but now I'm wondering why the distances array that gets calculated in voxl-vision-px4 sends out false positives, stating that there's an obstacle between 1.6m and 1.9m ahead, when clearly there isn't. This is what I see in terms of distances generated from the stereo camera view I have attached below:



Disparity raw (image saved by voxl-dfs-server -s):
Disparity screenshots from web portal:
scaled:

raw:

Following is my camera calibration on unit M20000005FW:
Extrinsics:
%YAML:1.0 --- R: !!opencv-matrix rows: 3 cols: 3 dt: d data: [ 9.9766949807073035e-01, 3.2726419179402305e-02, 5.9871145863353382e-02, -3.3135402553510745e-02, 9.9943374643317273e-01, 5.8507767150416416e-03, -5.9645768642156684e-02, -7.8209959881417272e-03, 9.9818896723257755e-01 ] T: !!opencv-matrix rows: 3 cols: 1 dt: d data: [ -8.0702806185923404e-02, 1.3414138137096483e-03, 7.4901499926949659e-03 ] reprojection_error: 3.1717501660388558e-01 calibration_time: "2021-11-28 23:55:40"Intrinsics:
%YAML:1.0 --- M1: !!opencv-matrix rows: 3 cols: 3 dt: d data: [ 4.9801509489639710e+02, 0., 3.4535141859544910e+02, 0., 4.9660210124907837e+02, 2.5153003783439996e+02, 0., 0., 1. ] D1: !!opencv-matrix rows: 5 cols: 1 dt: d data: [ -1.7398718943898814e-01, 6.8113519993759170e-02, -7.1388044381347557e-05, -2.4636080589428406e-03, 0. ] reprojection_error1: 3.9142503079362151e-01 M2: !!opencv-matrix rows: 3 cols: 3 dt: d data: [ 4.9189021103330248e+02, 0., 2.5268459489748463e+02, 0., 4.9027463109482443e+02, 2.3132872578584897e+02, 0., 0., 1. ] D2: !!opencv-matrix rows: 5 cols: 1 dt: d data: [ -1.6866195998342057e-01, 4.2438171238534744e-02, 1.8663371564379684e-04, 3.5401519495983939e-03, 0. ] reprojection_error2: 4.0183396708155583e-01 width: 640 height: 480 distortion_model: plumb_bob calibration_time: "2021-11-28 23:55:40"Thanks again!
-
RE: Not getting valid depth from stereo pointcloud dataposted in VOXL Flight
@Alex-Gardner Hi Alex, we still haven't had any luck getting this to work, and our last resort is to create our own OpenCV environment and attempt to regenerate the depth pointcloud, as a means to determine where the issue lies.
Our impression was that this feature worked out of the box, but we have 4 vehicles that are facing the same problem, so we're wondering if it's a simple configuration change, a bug in the system, or simply the wrong versions of code deployed. -
RE: Flying in poorly-lit conditionsposted in VOXL Flight
@Chad-Sweet I referenced the forum post linked here, and after some more investigation I found that it's not possible to add an extra tracking OV7251 camera onto the system. However, I'm wondering if it's possible to add a different model of camera alongside the stereo and tracking cameras
-
RE: Not getting valid depth from stereo pointcloud dataposted in VOXL Flight
@Alex-Gardner Hi Alex, any updates on this? Am I able to see a valid point cloud when everything is working properly? Or are my results the best version of the point cloud I'll be getting?
-
RE: Flying in poorly-lit conditionsposted in VOXL Flight
That makes sense, thank you! We will try to tweak the exposure settings before making major changes to the unit.
Another idea we were discussing that kind of relates back to our problem, is to add another tracking camera to the voxl system for redundancy. Technically and physically speaking, is there anything that would stop us from achieving that?
I'm thinking we would need to run another instance of voxl-vision-px4 and create a component that will consolidate the results of both, falling back on one if another fails.Any thoughts on that?
-
Flying in poorly-lit conditionsposted in VOXL Flight
We are using the M500 in poorly-lit hallways with a dark void. Even though we've installed lighting on the drone, we still weren't able to get a stable position control status, it kept falling back to stabilized mode. If we fly the drone sideways facing the walls of the hallway, it flies much better (obviously, since it gets more odometry that way). So we're thinking of possible solutions:
- Rotate the tracking camera 90 degrees to face the walls of the hallways instead of the front, or move it to the side. That would keep the stereo cameras facing forward for offboard mode.
- Switch the RC channels so that our forward is the drone's side, but that means the stereo cameras would also face the side. This wouldn't allow us to use offboard mode, so we would either need to move the stereo cameras to the front, or use a little LIDAR instead.
Any thoughts or technical notes on the previous points?
-
RE: Not getting valid depth from stereo pointcloud dataposted in VOXL Flight
Update
I was able to recalibrate the cameras, but the proximity data still seems off. Here's what I'm seeing:
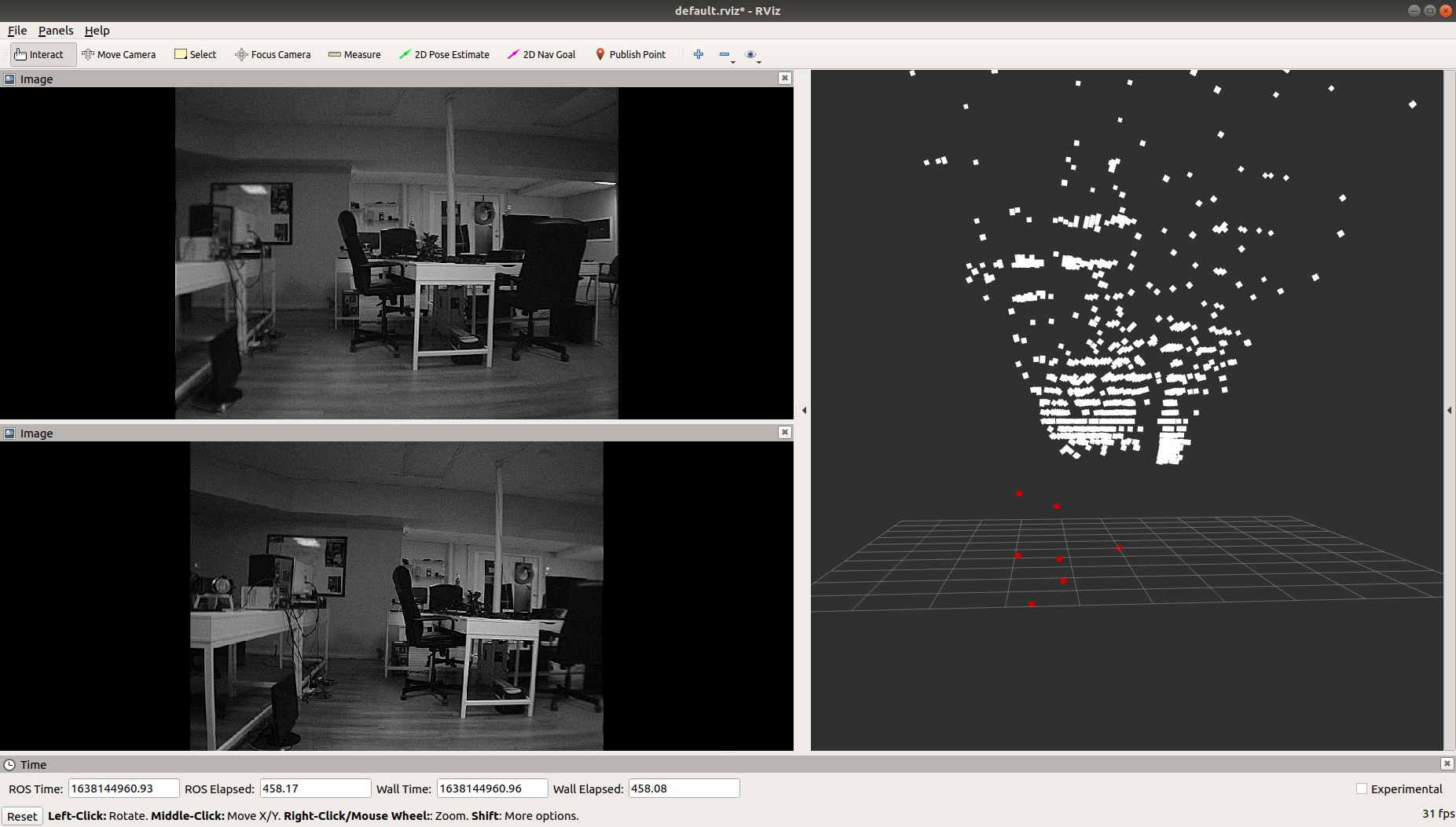
Note that the white pointcloud is the DFS disparity pointcloud. The red points are the points that were considered the closest to the drone when calculating the closest obstacle in voa_manager. I'm simply doing the following:
// calculate distance in cm to send to px4 double x = T_point_wrt_level.d[0]; double y = T_point_wrt_level.d[1]; double z = T_point_wrt_stereo.d[2];.....
// record if this point is closer than previously detected obstacle in this bin if(dist_cm < distances[bin]) { distances[bin] = dist_cm; if(send_linescan) { point_cloud_points[bin] = x; point_cloud_points[bin+1] = y; point_cloud_points[bin+2] = z; } }And then sending the
point_cloud_pointsdata over a new pipe that gets recognised automatically byvoxl_mpa_to_rosAny thoughts?
-
RE: Not getting valid depth from stereo pointcloud dataposted in VOXL Flight
Hi Alex,
Thank you for your response! I tried 2 things:
- I attempted to calibrate the stereo extrinsics, and got the following error:
voxl-calibrate-camera stereo -s 9x6 -l 0.029 -e Sampling overlapping images now Enter an empty line to take a sample or "stop" to finish sampling Taking Frame Taking Frame stop Stopping sampling Pulling existing intrinsics from: /data/modalai/opencv_stereo_intrinsics.yml Matrix L [497.7006450187309, 0, 295.8446445528053; 0, 496.3585448760351, 231.712917372481; 0, 0, 1] Distortion L [-0.1865369023976547; 0.1016650425512336; 0.0001161942987197076; 0.004382065643093006; 0] Matrix R [490.0228530745731, 0, 373.8964558150473; 0, 489.1449020535995, 247.3517837095496; 0, 0, 1] Distortion R [-0.2086578047150433; 0.151676525578168; -0.001749483285398663; -0.00269335419013983; 0] Calibrating Extrinsics 2 frames will be processed R [0.9913194969599594, 0.03829151497302103, -0.1257752552298109; -0.04342180569409582, 0.9983222939882923, -0.038303317300436; 0.1240975492800618, 0.04343221393188008, 0.9913190410032776] T [-0.1452994050346482; -0.007246953931032494; -0.0001531663907812685] Re-projection error reported by stereoCalibrate: 5.086737 Extrinsics Calibration Failed Max reprojection error: 0.5 Exiting CleanlyHere are my intrinsics:
%YAML:1.0 --- M1: !!opencv-matrix rows: 3 cols: 3 dt: d data: [ 4.9770064501873094e+02, 0., 2.9584464455280528e+02, 0., 4.9635854487603513e+02, 2.3171291737248100e+02, 0., 0., 1. ] D1: !!opencv-matrix rows: 5 cols: 1 dt: d data: [ -1.8653690239765469e-01, 1.0166504255123363e-01, 1.1619429871970763e-04, 4.3820656430930060e-03, 0. ] M2: !!opencv-matrix rows: 3 cols: 3 dt: d data: [ 4.9002285307457311e+02, 0., 3.7389645581504732e+02, 0., 4.8914490205359948e+02, 2.4735178370954961e+02, 0., 0., 1. ] D2: !!opencv-matrix rows: 5 cols: 1 dt: d data: [ -2.0865780471504333e-01, 1.5167652557816802e-01, -1.7494832853986628e-03, -2.6933541901398303e-03, 0. ] distortion_model: plumb_bob width: 640. height: 480.- I also played with the dfs configs some more and looked at the depth pointcloud again, and I know this might be fixed when calibration is done, but it seems very wrong as there are way too many points close to the drone.
Here's my updated dfs config:
{ "skip_n_frames": 5, "n_disparity_levels": 24, "sobel_cutoff": 5, "first_median_filter_size": 7, "en_second_median_filter": false, "second_median_filter_size": 7 }Here's what I'm seeing:

Any thoughts on this?
Thanks!
-
Not getting valid depth from stereo pointcloud dataposted in VOXL Flight
I'm trying to work back on why our collision prevention does not work as expected, and I noticed that we're not getting back a valid depth from stereo point cloud.
I've saved some more images from DFS server, that I've attached here. The weird thing is that I can see disparity points in the raw image, but they all seem to get filtered out, leaving little to no features to measure. I'm wondering how normal that is, what I'm expected to see in disparity images, and whether my environment is in good condition for this experiment.
I can follow up with the ROS pointcloud recording for your reference, but they're basically all inf or -inf values as such:
4684.26830914,-inf,inf,10000.0Thanks in advance
Stereo right:

Stereo left:

Disparity raw:
Disparity scaled after blur:
Disparity filtered after blur:
-
RE: voxl-dfs-server failing to runposted in Modal Pipe Architecture (MPA)
Seemed like a weird fluke... I reinstalled the system image + voxl suite this time from the install script, then removed the packages individually and reinstalled my built versions, and it worked...
Thank you though!
Lynn