cloud points
-
Dear all,
how can I get the web portal and cloud point as in your video?
straggling with that for few days
-
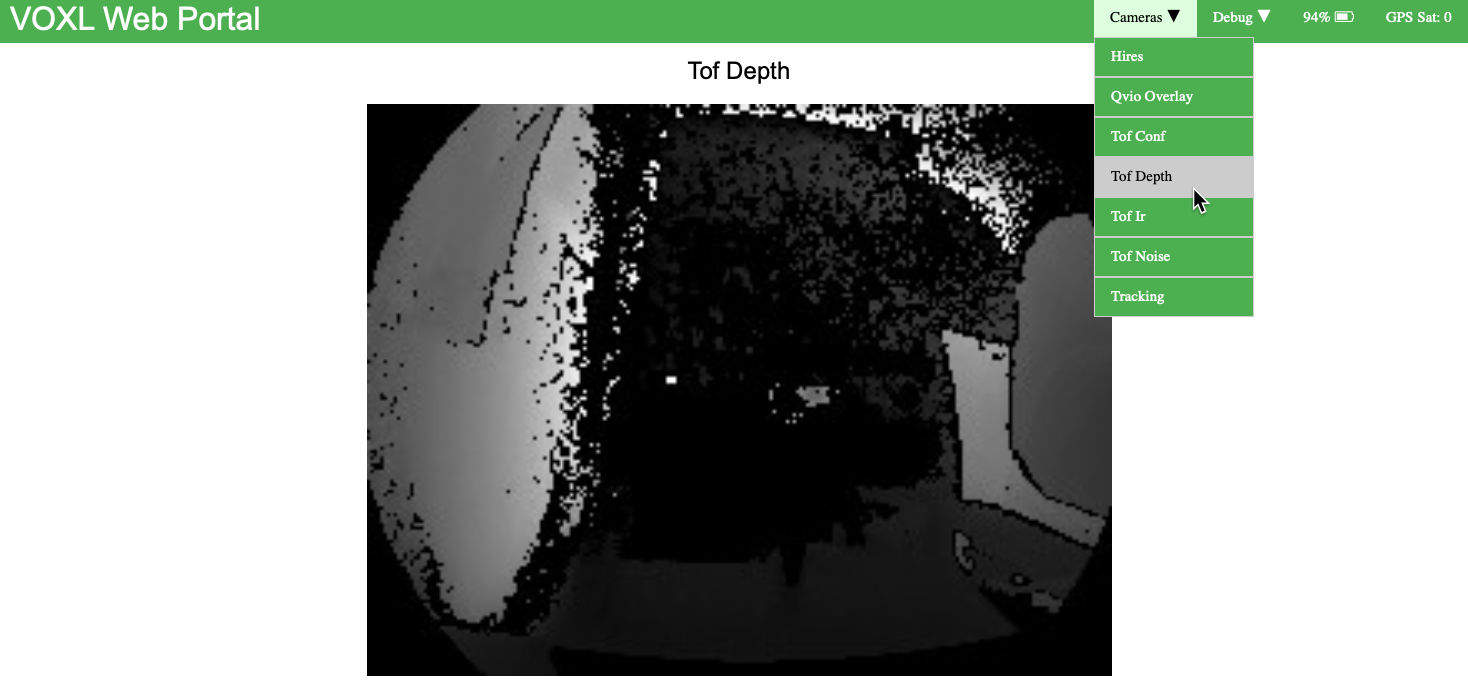
You need to determine the IP address of your VOXL and then simply type that into a web browser on the same network.
https://docs.modalai.com/wifi-setup/ for more details.
In the portal, navigate to Cameras -> TOF Depth:
-
For the native point cloud viewer in voxl-portal, you must install from the opkg dev repository. You can point opkg to the correct repository and pull the package list by running:
voxl-configure-opkg dev opkg updateThen, as we have recently renamed some of our packages, you will face some dependency issues if you try to install the latest version. If you are not using custom versions of any of these libraries, you can simply remove them before installing the latest version of voxl-portal and opkg will install the correctly named dependencies without issue:
opkg remove libmodal_json libmodal_pipe libvoxl_cutils libjpeg_turbo --force-depends opkg install voxl-portal -
Dear Matt,
i done the process, i bought the voxl flight deck,
i am afraid that i missing a key issue, does i have a tof camera ??and if not, how i can buy one and how it's difficult to attach it to the flight deck?
zeev
-
any answer??
-
Hi Zeev,
You can purchase tof cameras on our website. The flight deck does not come designed to hold a TOF cam, but if you're just trying to test stuff out you can easily tape it to the front with double sided tape (we do this in our office). If you're looking for a more durable solution, the voxl cam is the platform that we have built designed around the TOF sensor.
-
if I only know about voxl 2, or voxl cam.
you need to strength the pre sale")
to duck a tape is not an option, is there any 3d model that I can print?
and where I will connect it on my voxl flight deck, which camera I will take out?
-
if I only know about voxl 2, or voxl cam.
you need to strength the pre saleto duck a tape is not an option, is there any 3d model that I can print?
and where I will connect it on my voxl flight deck, which camera I will take out?
@Zeev-Mindali https://docs.modalai.com/camera-connections/ lists the various supported camera connections and which ports to attach them.
-
We have 2d and 3d models of the sensor here, if you're trying to create a finished product and not use a voxl-cam we'd recommend designing a bezel around the sensor models that we provide to best fit your specific needs.
-
saw the 3d, it's not what i looking for

i make it short.
i bought voxl flight deck v1 with hires,stereo,tracking
and for the cloud points i now understand i need tof,stereo,tracking.i think if i asked for the setup with the tof, i could get all connected in specific plastic.
i willing to buy the tof camera, but i would like the plastic in front of the flight deck that will support the tof camera, rather then hires camera.is there any step file to print the front side with tof?
-
Unfortunately we don't have any such design, the flight deck was not designed to hold the TOF sensor since it's mainly for outdoor platforms. The step file for the flight deck can be found here, it shouldn't be too hard to modify the front plate yourself and print a new one if you'd like to add a TOF cam.
-
ok,
understood, I ordered the tof camera, hoping for the best
-
Unfortunately we don't have any such design, the flight deck was not designed to hold the TOF sensor since it's mainly for outdoor platforms. The step file for the flight deck can be found here, it shouldn't be too hard to modify the front plate yourself and print a new one if you'd like to add a TOF cam.
@Alex-Gardner one sec before I buy the tof camera
I see there is an extension cable is it come along with the camera, or I need to purchase it separately ?second thing, can you print the 3d model of the tof camera, and what will be the cost of that?
zeev
-
The MSU-M0040-1-01 kit connects directly to VOXL, it contains the TOF module and an adapter flex for VOXL.
-
so all I need is to buy the tof camera, and I will get the extension as in the picture?
-
It is not an extension, it is an adapter that connects the TOF module to the VOXL. It is included in MSU-M0040-1-01. We do not sell the TOF module without an adapter.
-
It is not an extension, it is an adapter that connects the TOF module to the VOXL. It is included in MSU-M0040-1-01. We do not sell the TOF module without an adapter.
@Chad-Sweet
sweet, placing an order.
it will give me the cloud point, right? want to be sure -
Anything that produces a depth map can be used to create a point cloud. Both the stereo sensors, using depth from stereo, and TOF generate depth maps. The stereo sensors are best for outdoor use, the TOF sensor is best for indoor use.
-
last question :
I could not see the point cloud with stereo , but since I need it to indoor solution, I will use tof anyway.I using the drone without any GPS module (don't need it)
but I could not to change from manual to mission nor off board.when I change the gps to rc transmitter (first option) I was able to get move to mission
but only left stick worked (up down rotate) the second stick won't work (forward and rotation)is there a way to move to mission without gps module?
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login