Drone Flipped
-
We have been running the VOXL Flight Deck using the same setup as the M500 (assembled and bought the equivalent frame and parts ourselves) and we made sure that all required services are running.
Yesterday we did a test flight again and we were able to get the correct x,y,z data and I set the drone to fly in position mode. Upon trying to takeoff the drone quickly flipped over and destroyed two of the propellers. All calibrations were done and drone was able to be armed fine and everything.
I believe I know what the problem is but I want to confirm with you. I changed the motor spin direction and propellers to make sure they align with the image posted and with the M500 documentation. After the crash I realized that in QGroundcontrol that when using the motor testing function it didn't align with the picture.
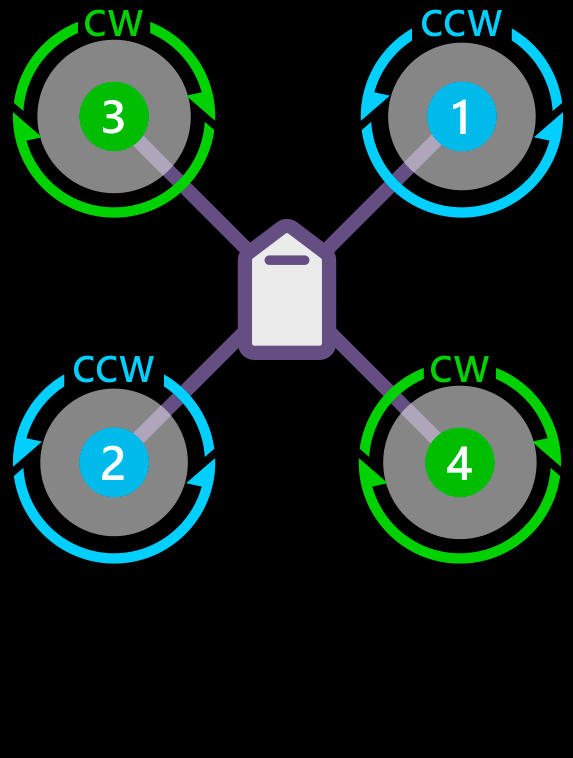
For example spinning up motor 2 using QGroundControl would actually spin the physical motor 3 labelled on the diagram. Spinning motor 3 on QGroundControl would then spin the physical motor 2 labelled on the diagram.
So on the drone physically all 4 motors are technically spinning in the correct direction.
The problem is the mapping from physical drone to PX4/QGroundControl since they are mapped in different positions.Would you be so kind as to confirm that when you go into QGroundControl and test the motors that when you throttle up motor 2 the back left motor spins and that the motor positions labels 1,2,3,4 on QGroundControl correspond to the diagram posted.
If this is true can the change be done in software or do I need to take apart the drone and change the ESC servo wire positions on the breakout board.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login