m500 estimated flying paths
-
Hi team,
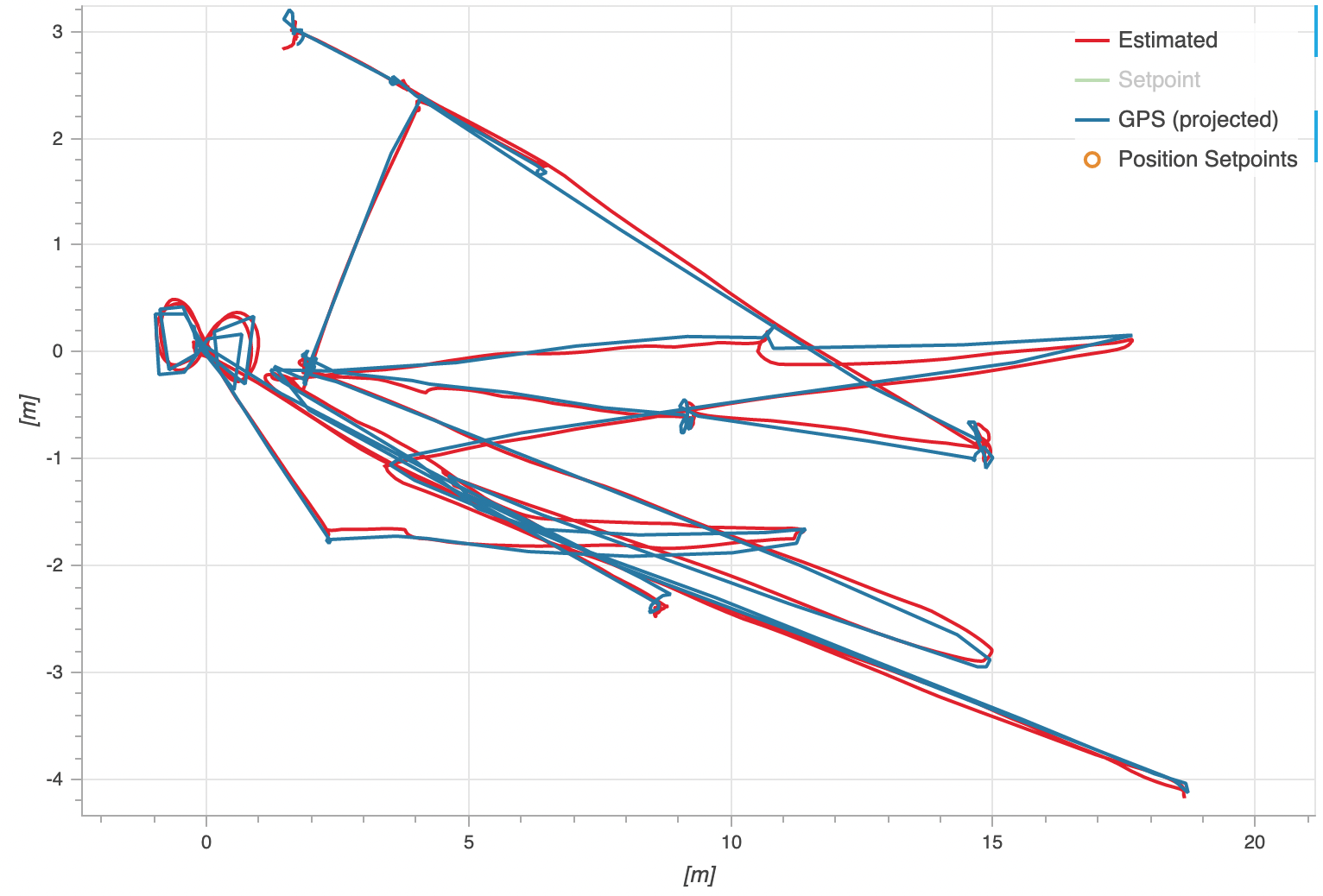
I output this figure by px4 flight review:
I am enabling outdoor flight mode by GPS settings.-
I am wondering how the estimated path (red line) is generated? Is it generated using VIO or GPS only or VIO + GPS? Where could I locate the source code for this path estimation?
-
I am also wondering what does the "Setpoint" in the right corner legend represent for?
-
For the GPS showing in the figure:
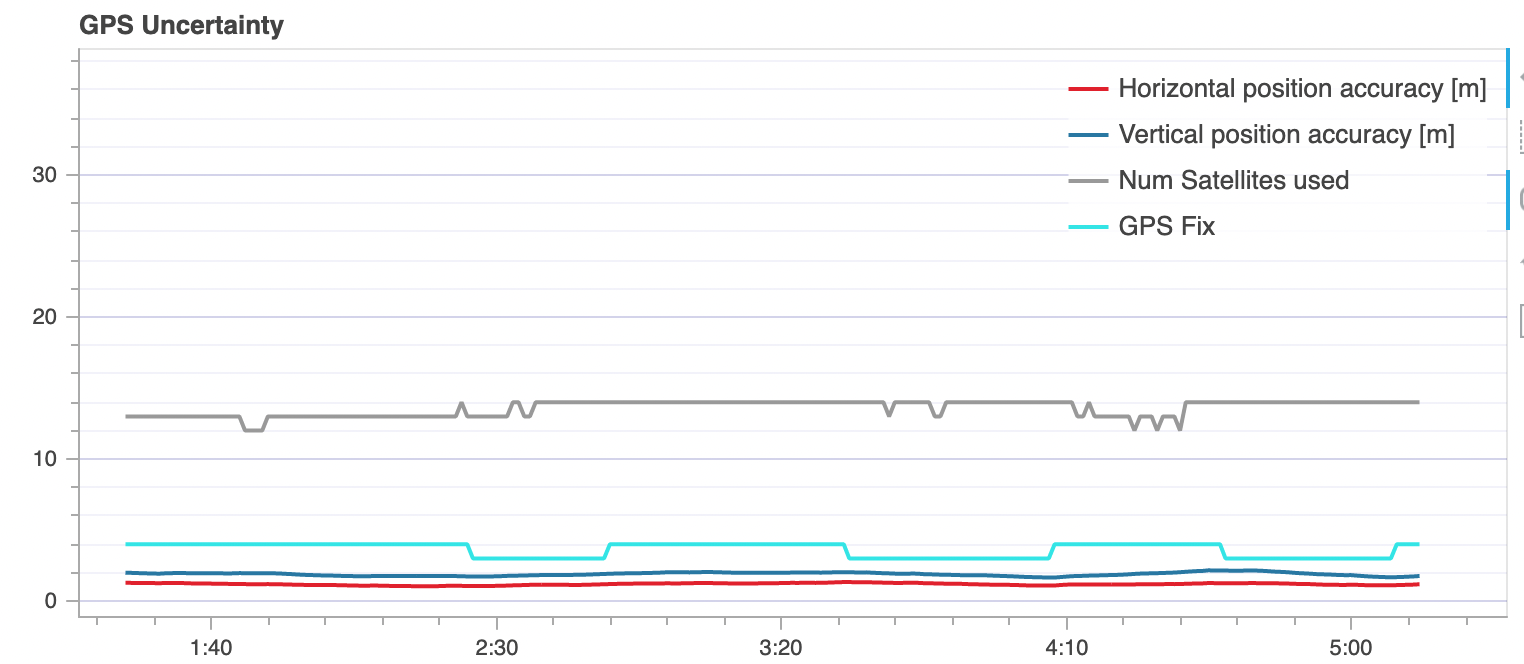
Is it possible to improve both H and V position accuracy by GPS settings on m500? Could I modify the num satellites used? What does the GPS Fix stand for?
Thanks.
-
-
Hi team,
I output this figure by px4 flight review:
I am enabling outdoor flight mode by GPS settings.-
I am wondering how the estimated path (red line) is generated? Is it generated using VIO or GPS only or VIO + GPS? Where could I locate the source code for this path estimation?
-
I am also wondering what does the "Setpoint" in the right corner legend represent for?
-
For the GPS showing in the figure:
Is it possible to improve both H and V position accuracy by GPS settings on m500? Could I modify the num satellites used? What does the GPS Fix stand for?
Thanks.
@yu-zhang These are all questions that would be better answered by the PX4 community. Also, all of the PX4 software is open source so you could probably look through it and find the answers that way.
-
-
@yu-zhang These are all questions that would be better answered by the PX4 community. Also, all of the PX4 software is open source so you could probably look through it and find the answers that way.
-
@Eric-Katzfey I thought the estimated path was generated by voxl VIO. All right, I will have a look at px4 community and check if this is a default path estimation by px4.
@yu-zhang Sorry, didn't see the VIO part. VIO will send an odometry mavlink message to PX4. Code for that is here: https://gitlab.com/voxl-public/modal-pipe-architecture/voxl-vision-px4/-/blob/master/src/vio_manager.c
-
@yu-zhang Sorry, didn't see the VIO part. VIO will send an odometry mavlink message to PX4. Code for that is here: https://gitlab.com/voxl-public/modal-pipe-architecture/voxl-vision-px4/-/blob/master/src/vio_manager.c
")
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login