Urgent Support needed for Drone not armed after RC controller calibration
-
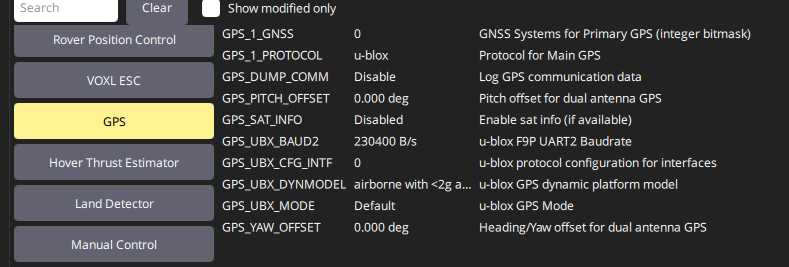
@Eric-Katzfey GPS is 0. EKF2_GPS_CHECK is 245 and i cannot update it to 1.
-
@Eric-Katzfey Below is the px4-parameters.
voxl2:~$ px4-param show
Symbols: x = used, + = saved, * = unsaved
x ASPD_SCALE_1 [0,23] : 1.0000
x + BAT1_CAPACITY [1,42] : 3950.0000
x + BAT1_N_CELLS [2,45] : 4
x + BAT1_R_INTERNAL [3,46] : 0.0220
x BAT1_SOURCE [4,48] : 0
x + BAT1_V_CHARGED [5,50] : 4.1000
x + BAT1_V_EMPTY [6,52] : 2.8000
x BAT1_V_LOAD_DROP [7,53] : 0.1000
x + BAT_AVRG_CURRENT [8,68] : 3.4000
x + BAT_CRIT_THR [9,69] : 0.1000
x BAT_EMERGEN_THR [10,70] : 0.0500
x BAT_LOW_THR [11,71] : 0.1500
x BAT_N_CELLS [12,72] : 3
x BAT_V_CHARGED [13,73] : 4.0500
x BAT_V_EMPTY [14,74] : 3.6000
x BAT_V_LOAD_DROP [15,75] : 0.3000
x + CAL_ACC0_ID [16,77] : 2490378
x + CAL_ACC0_PRIO [17,78] : 50
x CAL_ACC0_ROT [18,79] : -1
x + CAL_ACC0_XOFF [19,80] : 0.0104
x + CAL_ACC0_XSCALE [20,81] : 0.9994
x + CAL_ACC0_YOFF [21,82] : 0.0122
x + CAL_ACC0_YSCALE [22,83] : 1.0011
x + CAL_ACC0_ZOFF [23,84] : 0.2113
x + CAL_ACC0_ZSCALE [24,85] : 0.9873
x CAL_ACC1_ID [25,86] : 0
x CAL_ACC2_ID [26,95] : 0
x CAL_ACC3_ID [27,104] : 0
x CAL_AIR_CMODEL [28,113] : 0
x CAL_AIR_TUBED_MM [29,114] : 1.5000
x CAL_AIR_TUBELEN [30,115] : 0.2000
x CAL_BARO0_ID [31,116] : 0
x CAL_BARO1_ID [32,119] : 0
x CAL_BARO2_ID [33,122] : 0
x CAL_BARO3_ID [34,125] : 0
x + CAL_GYRO0_ID [35,128] : 2490378
x + CAL_GYRO0_PRIO [36,129] : 50
x CAL_GYRO0_ROT [37,130] : -1
x + CAL_GYRO0_XOFF [38,131] : 0.0010
x + CAL_GYRO0_YOFF [39,132] : 0.0099
x + CAL_GYRO0_ZOFF [40,133] : -0.0099
x CAL_GYRO1_ID [41,134] : 0
x CAL_GYRO2_ID [42,140] : 0
x CAL_GYRO3_ID [43,146] : 0
x + CAL_MAG0_ID [44,152] : 527625
x + CAL_MAG0_PRIO [45,153] : 75
x + CAL_MAG0_ROT [46,154] : 0
x CAL_MAG0_XCOMP [47,155] : 0.0000
x + CAL_MAG0_XODIAG [48,156] : 0.0051
x + CAL_MAG0_XOFF [49,157] : -0.1164
x + CAL_MAG0_XSCALE [50,158] : 0.9666
x CAL_MAG0_YCOMP [51,159] : 0.0000
x + CAL_MAG0_YODIAG [52,160] : -0.0198
x + CAL_MAG0_YOFF [53,161] : -0.2084
x + CAL_MAG0_YSCALE [54,162] : 1.0124
x CAL_MAG0_ZCOMP [55,163] : 0.0000
x + CAL_MAG0_ZODIAG [56,164] : 0.0136
x + CAL_MAG0_ZOFF [57,165] : 0.0563
x + CAL_MAG0_ZSCALE [58,166] : 1.0239
x CAL_MAG1_ID [59,167] : 0
x CAL_MAG1_ROT [60,169] : -1
x CAL_MAG2_ID [61,182] : 0
x CAL_MAG2_ROT [62,184] : -1
x CAL_MAG3_ID [63,197] : 0
x CAL_MAG3_ROT [64,199] : -1
x CAL_MAG_COMP_TYP [65,212] : 0
x CAL_MAG_SIDES [66,213] : 63
x CA_AIRFRAME [67,224] : 0
x CA_FAILURE_MODE [68,225] : 0
x CA_METHOD [69,240] : 2
x CA_R0_SLEW [70,241] : 0.0000
x CA_R10_SLEW [71,242] : 0.0000
x CA_R11_SLEW [72,243] : 0.0000
x CA_R1_SLEW [73,244] : 0.0000
x CA_R2_SLEW [74,245] : 0.0000
x CA_R3_SLEW [75,246] : 0.0000
x CA_R4_SLEW [76,247] : 0.0000
x CA_R5_SLEW [77,248] : 0.0000
x CA_R6_SLEW [78,249] : 0.0000
x CA_R7_SLEW [79,250] : 0.0000
x CA_R8_SLEW [80,251] : 0.0000
x CA_R9_SLEW [81,252] : 0.0000
x CA_ROTOR0_AX [82,253] : 0.0000
x CA_ROTOR0_AY [83,254] : 0.0000
x CA_ROTOR0_AZ [84,255] : -1.0000
x CA_ROTOR0_CT [85,256] : 6.5000
x CA_ROTOR0_KM [86,257] : 0.0500
x + CA_ROTOR0_PX [87,258] : 0.0850
x + CA_ROTOR0_PY [88,259] : 0.0625
x CA_ROTOR0_PZ [89,260] : 0.0000
x CA_ROTOR10_AX [90,262] : 0.0000
x CA_ROTOR10_AY [91,263] : 0.0000
x CA_ROTOR10_AZ [92,264] : -1.0000
x CA_ROTOR10_CT [93,265] : 6.5000
x CA_ROTOR10_KM [94,266] : 0.0500
x CA_ROTOR10_PX [95,267] : 0.0000
x CA_ROTOR10_PY [96,268] : 0.0000
x CA_ROTOR10_PZ [97,269] : 0.0000
x CA_ROTOR11_AX [98,271] : 0.0000
x CA_ROTOR11_AY [99,272] : 0.0000
x CA_ROTOR11_AZ [100,273] : -1.0000
x CA_ROTOR11_CT [101,274] : 6.5000
x CA_ROTOR11_KM [102,275] : 0.0500
x CA_ROTOR11_PX [103,276] : 0.0000
x CA_ROTOR11_PY [104,277] : 0.0000
x CA_ROTOR11_PZ [105,278] : 0.0000
x CA_ROTOR1_AX [106,280] : 0.0000
x CA_ROTOR1_AY [107,281] : 0.0000
x CA_ROTOR1_AZ [108,282] : -1.0000
x CA_ROTOR1_CT [109,283] : 6.5000
x CA_ROTOR1_KM [110,284] : 0.0500
x + CA_ROTOR1_PX [111,285] : -0.0850
x + CA_ROTOR1_PY [112,286] : -0.0625
x CA_ROTOR1_PZ [113,287] : 0.0000
x CA_ROTOR2_AX [114,289] : 0.0000
x CA_ROTOR2_AY [115,290] : 0.0000
x CA_ROTOR2_AZ [116,291] : -1.0000
x CA_ROTOR2_CT [117,292] : 6.5000
x + CA_ROTOR2_KM [118,293] : -0.0500
x + CA_ROTOR2_PX [119,294] : 0.0850
x + CA_ROTOR2_PY [120,295] : -0.0625
x CA_ROTOR2_PZ [121,296] : 0.0000
x CA_ROTOR3_AX [122,298] : 0.0000
x CA_ROTOR3_AY [123,299] : 0.0000
x CA_ROTOR3_AZ [124,300] : -1.0000
x CA_ROTOR3_CT [125,301] : 6.5000
x + CA_ROTOR3_KM [126,302] : -0.0500
x + CA_ROTOR3_PX [127,303] : -0.0850
x + CA_ROTOR3_PY [128,304] : 0.0625
x CA_ROTOR3_PZ [129,305] : 0.0000
x CA_ROTOR4_AX [130,307] : 0.0000
x CA_ROTOR4_AY [131,308] : 0.0000
x CA_ROTOR4_AZ [132,309] : -1.0000
x CA_ROTOR4_CT [133,310] : 6.5000
x CA_ROTOR4_KM [134,311] : 0.0500
x CA_ROTOR4_PX [135,312] : 0.0000
x CA_ROTOR4_PY [136,313] : 0.0000
x CA_ROTOR4_PZ [137,314] : 0.0000
x CA_ROTOR5_AX [138,316] : 0.0000
x CA_ROTOR5_AY [139,317] : 0.0000
x CA_ROTOR5_AZ [140,318] : -1.0000
x CA_ROTOR5_CT [141,319] : 6.5000
x CA_ROTOR5_KM [142,320] : 0.0500
x CA_ROTOR5_PX [143,321] : 0.0000
x CA_ROTOR5_PY [144,322] : 0.0000
x CA_ROTOR5_PZ [145,323] : 0.0000
x CA_ROTOR6_AX [146,325] : 0.0000
x CA_ROTOR6_AY [147,326] : 0.0000
x CA_ROTOR6_AZ [148,327] : -1.0000
x CA_ROTOR6_CT [149,328] : 6.5000
x CA_ROTOR6_KM [150,329] : 0.0500
x CA_ROTOR6_PX [151,330] : 0.0000
x CA_ROTOR6_PY [152,331] : 0.0000
x CA_ROTOR6_PZ [153,332] : 0.0000
x CA_ROTOR7_AX [154,334] : 0.0000
x CA_ROTOR7_AY [155,335] : 0.0000
x CA_ROTOR7_AZ [156,336] : -1.0000
x CA_ROTOR7_CT [157,337] : 6.5000
x CA_ROTOR7_KM [158,338] : 0.0500
x CA_ROTOR7_PX [159,339] : 0.0000
x CA_ROTOR7_PY [160,340] : 0.0000
x CA_ROTOR7_PZ [161,341] : 0.0000
x CA_ROTOR8_AX [162,343] : 0.0000
x CA_ROTOR8_AY [163,344] : 0.0000
x CA_ROTOR8_AZ [164,345] : -1.0000
x CA_ROTOR8_CT [165,346] : 6.5000
x CA_ROTOR8_KM [166,347] : 0.0500
x CA_ROTOR8_PX [167,348] : 0.0000
x CA_ROTOR8_PY [168,349] : 0.0000
x CA_ROTOR8_PZ [169,350] : 0.0000
x CA_ROTOR9_AX [170,352] : 0.0000
x CA_ROTOR9_AY [171,353] : 0.0000
x CA_ROTOR9_AZ [172,354] : -1.0000
x CA_ROTOR9_CT [173,355] : 6.5000
x CA_ROTOR9_KM [174,356] : 0.0500
x CA_ROTOR9_PX [175,357] : 0.0000
x CA_ROTOR9_PY [176,358] : 0.0000
x CA_ROTOR9_PZ [177,359] : 0.0000
x + CA_ROTOR_COUNT [178,361] : 4
x CA_R_REV [179,362] : 0
x CA_SV0_SLEW [180,372] : 0.0000
x CA_SV1_SLEW [181,373] : 0.0000
x CA_SV2_SLEW [182,374] : 0.0000
x CA_SV3_SLEW [183,375] : 0.0000
x CA_SV4_SLEW [184,376] : 0.0000
x CA_SV5_SLEW [185,377] : 0.0000
x CA_SV6_SLEW [186,378] : 0.0000
x CA_SV7_SLEW [187,379] : 0.0000
x CBRK_AIRSPD_CHK [188,454] : 0
x CBRK_FLIGHTTERM [189,456] : 121212
x CBRK_IO_SAFETY [190,457] : 22027
x + CBRK_SUPPLY_CHK [191,458] : 894281
x CBRK_USB_CHK [192,459] : 197848
x CBRK_VTOLARMING [193,460] : 0
x COM_ACT_FAIL_ACT [194,461] : 0
x COM_ARM_ARSP_EN [195,462] : 1
x COM_ARM_AUTH_ID [196,463] : 10
x COM_ARM_AUTH_MET [197,464] : 0
x COM_ARM_AUTH_REQ [198,465] : 0
x COM_ARM_AUTH_TO [199,466] : 1.0000
x COM_ARM_BAD_INOV [200,467] : 0
x COM_ARM_CHK_ESCS [201,468] : 0
x COM_ARM_EKF_BIAS [202,469] : 3.0000
x COM_ARM_EKF_HGT [203,470] : 1.0000
x COM_ARM_EKF_POS [204,471] : 0.5000
x COM_ARM_EKF_VEL [205,472] : 0.5000
x COM_ARM_EKF_YAW [206,473] : 0.5000
x COM_ARM_HFLT_CHK [207,474] : 1
x COM_ARM_IMU_ACC [208,475] : 0.7000
x COM_ARM_IMU_GYR [209,476] : 0.2500
x COM_ARM_MAG_ANG [210,477] : 60
x COM_ARM_MAG_STR [211,478] : 2
x COM_ARM_MIS_REQ [212,479] : 0
x COM_ARM_ODID [213,480] : 0
x + COM_ARM_SDCARD [214,481] : 0
x COM_ARM_SWISBTN [215,482] : 0
x COM_ARM_WO_GPS [216,483] : 1
x + COM_CPU_MAX [217,484] : -1.0000
x COM_DISARM_FORCE [218,485] : 0
x + COM_DISARM_LAND [219,486] : 0.1000
x + COM_DISARM_PRFLT [220,487] : 20.0000
x COM_DL_LOSS_T [221,488] : 10
x COM_FAIL_ACT_T [222,489] : 5.0000
x + COM_FLIGHT_UUID [223,490] : 743
x + COM_FLTMODE1 [224,491] : 0
x COM_FLTMODE2 [225,492] : -1
x COM_FLTMODE3 [226,493] : -1
x COM_FLTMODE4 [227,494] : -1
x COM_FLTMODE5 [228,495] : -1
x COM_FLTMODE6 [229,496] : -1
x COM_FLT_PROFILE [230,497] : 0
x COM_FLT_TIME_MAX [231,498] : -1
x COM_FORCE_SAFETY [232,499] : 0
x COM_HLDL_LOSS_T [233,500] : 120
x COM_HLDL_REG_T [234,501] : 0
x COM_HOME_EN [235,502] : 1
x COM_HOME_IN_AIR [236,503] : 0
x COM_IMB_PROP_ACT [237,504] : 0
x + COM_KILL_DISARM [238,505] : 0.0000
x COM_LKDOWN_TKO [239,506] : 3.0000
x COM_LOW_BAT_ACT [240,507] : 0
x COM_MOT_TEST_EN [241,508] : 1
x COM_OBC_LOSS_T [242,509] : 5.0000
x COM_OBL_RC_ACT [243,510] : 0
x COM_OBS_AVOID [244,511] : 0
x COM_OF_LOSS_T [245,512] : 1.0000
x COM_PARACHUTE [246,513] : 0
x COM_POSCTL_NAVL [247,514] : 0
x COM_POS_FS_DELAY [248,515] : 1
x COM_POS_FS_EPH [249,516] : 5.0000
x COM_POS_LOW_EPH [250,517] : -1.0000
x COM_POWER_COUNT [251,518] : 1
x COM_PREARM_MODE [252,519] : 0
x COM_QC_ACT [253,520] : 0
x COM_RCL_EXCEPT [254,521] : 0
x COM_RC_ARM_HYST [255,522] : 1000
x COM_RC_IN_MODE [256,523] : 3
x COM_RC_LOSS_T [257,524] : 0.5000
x COM_RC_OVERRIDE [258,525] : 1
x COM_RC_STICK_OV [259,526] : 30.0000
x + COM_SPOOLUP_TIME [260,527] : 2.0000
x COM_TAKEOFF_ACT [261,528] : 0
x COM_VEL_FS_EVH [262,529] : 1.0000
x COM_WIND_MAX [263,530] : -1.0000
x COM_WIND_WARN [264,531] : -1.0000
x CP_DELAY [265,532] : 0.4000
x CP_DIST [266,533] : -1.0000
x CP_GO_NO_DATA [267,534] : 0
x CP_GUIDE_ANG [268,535] : 30.0000
x EKF2_ABIAS_INIT [269,543] : 0.2000
x EKF2_ABL_ACCLIM [270,544] : 25.0000
x EKF2_ABL_GYRLIM [271,545] : 3.0000
x EKF2_ABL_LIM [272,546] : 0.4000
x EKF2_ABL_TAU [273,547] : 0.5000
x EKF2_ACC_B_NOISE [274,548] : 0.0030
x EKF2_ACC_NOISE [275,549] : 0.3500
x EKF2_AID_MASK [276,550] : 0
x EKF2_ANGERR_INIT [277,551] : 0.1000
x EKF2_ARSP_THR [278,552] : 0.0000
x EKF2_ASPD_MAX [279,553] : 20.0000
x EKF2_ASP_DELAY [280,554] : 100.0000
x EKF2_AVEL_DELAY [281,555] : 5.0000
x EKF2_BARO_CTRL [282,556] : 1
x EKF2_BARO_DELAY [283,557] : 0.0000
x EKF2_BARO_GATE [284,558] : 5.0000
x EKF2_BARO_NOISE [285,559] : 3.5000
x EKF2_BCOEF_X [286,560] : 100.0000
x EKF2_BCOEF_Y [287,561] : 100.0000
x EKF2_BETA_GATE [288,562] : 5.0000
x EKF2_BETA_NOISE [289,563] : 0.3000
x EKF2_DECL_TYPE [290,564] : 7
x EKF2_DRAG_CTRL [291,565] : 0
x EKF2_DRAG_NOISE [292,566] : 2.5000
x EKF2_EAS_NOISE [293,567] : 1.4000
x EKF2_EVA_NOISE [294,568] : 0.1000
x EKF2_EVP_GATE [295,569] : 5.0000
x EKF2_EVP_NOISE [296,570] : 0.1000
x EKF2_EVV_GATE [297,571] : 3.0000
x EKF2_EVV_NOISE [298,572] : 0.1000
x + EKF2_EV_CTRL [299,573] : 0
x EKF2_EV_DELAY [300,574] : 0.0000
x EKF2_EV_HGT_TO [301,575] : 5000
x EKF2_EV_NOISE_MD [302,576] : 0
x EKF2_EV_POS_TO [303,577] : 1000
x EKF2_EV_POS_X [304,578] : 0.0000
x EKF2_EV_POS_Y [305,579] : 0.0000
x EKF2_EV_POS_Z [306,580] : 0.0000
x EKF2_EV_QMIN [307,581] : 0
x EKF2_FUSE_BETA [308,582] : 0
x EKF2_GBIAS_INIT [309,583] : 0.1000
x EKF2_GND_EFF_DZ [310,584] : 4.0000
x EKF2_GND_MAX_HGT [311,585] : 0.5000
x EKF2_GPS_CHECK [312,586] : 245
x EKF2_GPS_CTRL [313,587] : 7
x EKF2_GPS_DELAY [314,588] : 110.0000
x EKF2_GPS_POS_X [315,589] : 0.0000
x EKF2_GPS_POS_Y [316,590] : 0.0000
x EKF2_GPS_POS_Z [317,591] : 0.0000
x EKF2_GPS_P_GATE [318,592] : 5.0000
x EKF2_GPS_P_NOISE [319,593] : 0.5000
x EKF2_GPS_V_GATE [320,594] : 5.0000
x EKF2_GPS_V_NOISE [321,595] : 0.3000
x EKF2_GRAV_NOISE [322,596] : 1.0000
x EKF2_GSF_TAS [323,597] : 15.0000
x EKF2_GYR_B_LIM [324,598] : 0.1500
x EKF2_GYR_B_NOISE [325,599] : 0.0010
x EKF2_GYR_NOISE [326,600] : 0.0150
x EKF2_HDG_GATE [327,601] : 2.6000
x EKF2_HEAD_NOISE [328,602] : 0.3000
x EKF2_HGT_REF [329,603] : 1
x EKF2_IMU_CTRL [330,604] : 3
x + EKF2_IMU_POS_X [331,605] : 0.0050
x + EKF2_IMU_POS_Y [332,606] : 0.0080
x + EKF2_IMU_POS_Z [333,607] : -0.0116
x EKF2_MAG_ACCLIM [334,608] : 0.5000
x EKF2_MAG_B_NOISE [335,609] : 0.0001
x EKF2_MAG_CHECK [336,610] : 1
x + EKF2_MAG_DECL [337,611] : -11.0090
x EKF2_MAG_DELAY [338,612] : 0.0000
x EKF2_MAG_E_NOISE [339,613] : 0.0010
x EKF2_MAG_GATE [340,614] : 3.0000
x EKF2_MAG_NOISE [341,615] : 0.0500
x EKF2_MAG_TYPE [342,616] : 0
x EKF2_MAG_YAWLIM [343,617] : 0.2000
x EKF2_MCOEF [344,618] : 0.1500
x EKF2_MIN_RNG [345,619] : 0.1000
x EKF2_NOAID_NOISE [346,622] : 10.0000
x EKF2_NOAID_TOUT [347,623] : 5000000
x EKF2_OF_CTRL [348,624] : 0
x EKF2_OF_DELAY [349,625] : 20.0000
x EKF2_OF_GATE [350,626] : 3.0000
x EKF2_OF_N_MAX [351,627] : 0.5000
x EKF2_OF_N_MIN [352,628] : 0.1500
x EKF2_OF_POS_X [353,629] : 0.0000
x EKF2_OF_POS_Y [354,630] : 0.0000
x EKF2_OF_POS_Z [355,631] : 0.0000
x EKF2_OF_QMIN [356,632] : 1
x EKF2_PCOEF_XN [357,633] : 0.0000
x EKF2_PCOEF_XP [358,634] : 0.0000
x EKF2_PCOEF_YN [359,635] : 0.0000
x EKF2_PCOEF_YP [360,636] : 0.0000
x EKF2_PCOEF_Z [361,637] : 0.0000
x EKF2_PREDICT_US [362,638] : 10000
x EKF2_REQ_EPH [363,639] : 3.0000
x EKF2_REQ_EPV [364,640] : 5.0000
x + EKF2_REQ_GPS_H [365,641] : 5.0000
x EKF2_REQ_HDRIFT [366,642] : 0.1000
x EKF2_REQ_NSATS [367,643] : 6
x EKF2_REQ_PDOP [368,644] : 2.5000
x + EKF2_REQ_SACC [369,645] : 1.5000
x EKF2_REQ_VDRIFT [370,646] : 0.2000
x EKF2_RNG_A_HMAX [371,647] : 5.0000
x EKF2_RNG_A_IGATE [372,648] : 1.0000
x EKF2_RNG_A_VMAX [373,649] : 1.0000
x + EKF2_RNG_CTRL [374,650] : 0
x EKF2_RNG_DELAY [375,651] : 5.0000
x EKF2_RNG_GATE [376,652] : 5.0000
x EKF2_RNG_K_GATE [377,653] : 1.0000
x EKF2_RNG_NOISE [378,654] : 0.1000
x EKF2_RNG_PITCH [379,655] : 0.0000
x EKF2_RNG_POS_X [380,656] : 0.0000
x EKF2_RNG_POS_Y [381,657] : 0.0000
x EKF2_RNG_POS_Z [382,658] : 0.0000
x EKF2_RNG_QLTY_T [383,659] : 1.0000
x EKF2_RNG_SFE [384,660] : 0.0500
x EKF2_SYNT_MAG_Z [385,666] : 0
x EKF2_TAS_GATE [386,667] : 3.0000
x EKF2_TAU_POS [387,668] : 0.2500
x EKF2_TAU_VEL [388,669] : 0.2500
x EKF2_TERR_GRAD [389,670] : 0.5000
x EKF2_TERR_MASK [390,671] : 3
x EKF2_TERR_NOISE [391,672] : 5.0000
x EKF2_WIND_NSD [392,673] : 0.0100
x FD_ACT_EN [393,679] : 1
x FD_ACT_MOT_C2T [394,680] : 2.0000
x FD_ACT_MOT_THR [395,681] : 0.2000
x FD_ACT_MOT_TOUT [396,682] : 100
x FD_ESCS_EN [397,683] : 1
x FD_EXT_ATS_EN [398,684] : 0
x FD_EXT_ATS_TRIG [399,685] : 1900
x FD_FAIL_P [400,686] : 60
x FD_FAIL_P_TTRI [401,687] : 0.3000
x FD_FAIL_R [402,688] : 60
x FD_FAIL_R_TTRI [403,689] : 0.3000
x FD_IMB_PROP_THR [404,690] : 30
x FLW_TGT_ALT_M [405,691] : 0
x FLW_TGT_DST [406,692] : 8.0000
x FLW_TGT_FA [407,693] : 180.0000
x FLW_TGT_HT [408,694] : 8.0000
x FLW_TGT_MAX_VEL [409,695] : 5.0000
x FLW_TGT_RS [410,696] : 0.1000
x FW_AIRSPD_MAX [411,700] : 20.0000
x FW_AIRSPD_TRIM [412,703] : 15.0000
x FW_ARSP_MODE [413,704] : 0
x FW_PSP_OFF [414,754] : 0.0000
x FW_T_CLMB_R_SP [415,783] : 3.0000
x FW_T_SINK_R_SP [416,792] : 2.0000
x GF_ACTION [417,816] : 2
x GF_ALTMODE [418,817] : 0
x GF_COUNT [419,818] : -1
x GF_MAX_HOR_DIST [420,819] : 0.0000
x GF_MAX_VER_DIST [421,820] : 0.0000
x GF_PREDICT [422,821] : 0
x GF_SOURCE [423,822] : 0
x GND_SPEED_THR_SC [424,833] : 1.0000
x GPIO_CTL_CH [425,840] : 0
x GPS_1_GNSS [426,841] : 0
x GPS_1_PROTOCOL [427,842] : 1
x GPS_DUMP_COMM [428,845] : 0
x GPS_PITCH_OFFSET [429,846] : 0.0000
x GPS_SAT_INFO [430,847] : 0
x GPS_UBX_BAUD2 [431,848] : 230400
x GPS_UBX_CFG_INTF [432,849] : 0
x GPS_UBX_DYNMODEL [433,850] : 7
x GPS_UBX_MODE [434,851] : 0
x GPS_YAW_OFFSET [435,852] : 0.0000
x HTE_ACC_GATE [436,870] : 3.0000
x HTE_HT_ERR_INIT [437,871] : 0.1000
x HTE_HT_NOISE [438,872] : 0.0036
x HTE_THR_RANGE [439,873] : 0.2000
x HTE_VXY_THR [440,874] : 10.0000
x HTE_VZ_THR [441,875] : 2.0000
x + IMU_ACCEL_CUTOFF [442,876] : 60.0000
x + IMU_DGYRO_CUTOFF [443,877] : 40.0000
x + IMU_GYRO_CUTOFF [444,879] : 80.0000
x IMU_GYRO_DNF_BW [445,880] : 15.0000
x + IMU_GYRO_DNF_EN [446,881] : 1
x IMU_GYRO_DNF_HMC [447,882] : 3
x IMU_GYRO_DNF_MIN [448,883] : 25.0000
x IMU_GYRO_NF0_BW [449,889] : 20.0000
x IMU_GYRO_NF0_FRQ [450,890] : 0.0000
x IMU_GYRO_NF1_BW [451,891] : 20.0000
x IMU_GYRO_NF1_FRQ [452,892] : 0.0000
x + IMU_GYRO_RATEMAX [453,893] : 800
x IMU_INTEG_RATE [454,894] : 200
x LNDMC_ALT_GND [455,916] : 2.0000
x LNDMC_ALT_MAX [456,917] : -1.0000
x + LNDMC_ROT_MAX [457,918] : 30.0000
x + LNDMC_TRIG_TIME [458,919] : 0.5000
x LNDMC_XY_VEL_MAX [459,920] : 1.5000
x LNDMC_Z_VEL_MAX [460,921] : 0.2500
x + LND_FLIGHT_T_HI [461,922] : 6
x + LND_FLIGHT_T_LO [462,923] : -1544484235
x + MAN_ARM_GESTURE [463,974] : 0
x MAV_COMP_ID [464,990] : 1
x MAV_FWDEXTSP [465,991] : 1
x MAV_HASH_CHK_EN [466,992] : 1
x MAV_HB_FORW_EN [467,993] : 1
x MAV_PROTO_VER [468,994] : 0
x MAV_RADIO_TOUT [469,995] : 5
x MAV_SIK_RADIO_ID [470,996] : 0
x MAV_SYS_ID [471,997] : 1
x + MAV_TYPE [472,998] : 2
x MAV_USEHILGPS [473,999] : 0
x MC_ACRO_EXPO [474,1002] : 0.6900
x MC_ACRO_EXPO_Y [475,1003] : 0.6900
x MC_ACRO_P_MAX [476,1004] : 720.0000
x MC_ACRO_R_MAX [477,1005] : 720.0000
x MC_ACRO_SUPEXPO [478,1006] : 0.7000
x MC_ACRO_SUPEXPOY [479,1007] : 0.7000
x MC_ACRO_Y_MAX [480,1008] : 540.0000
x MC_AIRMODE [481,1009] : 0
x MC_AT_APPLY [482,1010] : 1
x MC_AT_AXES [483,1011] : 3
x MC_AT_RISE_TIME [484,1013] : 0.1400
x MC_AT_START [485,1014] : 0
x MC_AT_SYSID_AMP [486,1015] : 0.7000
x MC_BAT_SCALE_EN [487,1016] : 0
x MC_INJECT_AMP [488,1017] : 0.0500
x MC_INJECT_CNT [489,1018] : 12
x MC_INJECT_EN [490,1019] : 0
x MC_INJECT_INC [491,1020] : 1.0000
x MC_INJECT_REST_T [492,1021] : 1.0000
x MC_INJECT_RPY [493,1022] : 2
x MC_INJECT_SINE_T [494,1023] : 5.0000
x MC_INJECT_START [495,1024] : 3.0000
x MC_MAN_TILT_TAU [496,1025] : 0.0000
x MC_ORBIT_RAD_MAX [497,1026] : 1000.0000
x + MC_PITCHRATE_D [498,1027] : 0.0011
x MC_PITCHRATE_FF [499,1028] : 0.0000
x + MC_PITCHRATE_I [500,1029] : 0.0960
x MC_PITCHRATE_K [501,1030] : 1.0000
x + MC_PITCHRATE_MAX [502,1031] : 130.0000
x + MC_PITCHRATE_P [503,1032] : 0.0640
x + MC_PITCH_CUTOFF [504,1033] : 25.0000
x + MC_PITCH_P [505,1034] : 8.0000
x MC_PR_INT_LIM [506,1035] : 0.3000
x + MC_ROLLRATE_D [507,1036] : 0.0013
x MC_ROLLRATE_FF [508,1037] : 0.0000
x + MC_ROLLRATE_I [509,1038] : 0.1000
x MC_ROLLRATE_K [510,1039] : 1.0000
x + MC_ROLLRATE_MAX [511,1040] : 130.0000
x + MC_ROLLRATE_P [512,1041] : 0.0640
x + MC_ROLL_CUTOFF [513,1042] : 25.0000
x + MC_ROLL_P [514,1043] : 8.0000
x MC_RR_INT_LIM [515,1044] : 0.3000
x MC_THR_CURVE_ACR [516,1045] : 0
x MC_YAWRATE_D [517,1046] : 0.0000
x MC_YAWRATE_FF [518,1047] : 0.0000
x + MC_YAWRATE_I [519,1048] : 0.5000
x MC_YAWRATE_K [520,1049] : 1.0000
x + MC_YAWRATE_MAX [521,1050] : 150.0000
x + MC_YAWRATE_P [522,1051] : 0.0700
x + MC_YAW_CUTOFF [523,1052] : 15.0000
x MC_YAW_P [524,1053] : 2.8000
x MC_YAW_WEIGHT [525,1054] : 0.4000
x MC_YR_INT_LIM [526,1055] : 0.3000
x MIS_DIST_1WP [527,1056] : 900.0000
x MIS_LND_ABRT_ALT [528,1057] : 30
x MIS_MNT_YAW_CTL [529,1058] : 0
x MIS_PD_TO [530,1059] : 5.0000
x MIS_TAKEOFF_ALT [531,1060] : 2.5000
x MIS_TKO_LAND_REQ [532,1061] : 0
x MIS_YAW_ERR [533,1062] : 12.0000
x MIS_YAW_TMT [534,1063] : -1.0000
x MODALAI_CONFIG [535,1083] : 0
x MOT_SLEW_MAX [536,1085] : 0.0000
x MPC_ACC_DOWN_MAX [537,1086] : 3.0000
x + MPC_ACC_HOR [538,1087] : 6.0000
x + MPC_ACC_HOR_MAX [539,1088] : 1000.0000
x MPC_ACC_UP_MAX [540,1089] : 4.0000
x MPC_ALT_MODE [541,1090] : 0
x MPC_HOLD_DZ [542,1091] : 0.1000
x + MPC_HOLD_MAX_XY [543,1092] : 0.0000
x + MPC_HOLD_MAX_Z [544,1093] : 0.0000
x MPC_JERK_AUTO [545,1094] : 4.0000
x + MPC_JERK_MAX [546,1095] : 40.0000
x MPC_LAND_ALT1 [547,1096] : 10.0000
x MPC_LAND_ALT2 [548,1097] : 5.0000
x MPC_LAND_ALT3 [549,1098] : 1.0000
x MPC_LAND_CRWL [550,1099] : 0.3000
x MPC_LAND_RADIUS [551,1100] : 1000.0000
x MPC_LAND_RC_HELP [552,1101] : 0
x + MPC_LAND_SPEED [553,1102] : 1.2000
x + MPC_MANTHR_MIN [554,1103] : 0.0400
x + MPC_MAN_TILT_MAX [555,1104] : 45.0000
x MPC_MAN_Y_MAX [556,1105] : 150.0000
x MPC_MAN_Y_TAU [557,1106] : 0.0800
x MPC_POS_MODE [558,1107] : 4
x MPC_THR_CURVE [559,1108] : 0
x + MPC_THR_HOVER [560,1109] : 0.1300
x + MPC_THR_MAX [561,1110] : 0.6000
x + MPC_THR_MIN [562,1111] : 0.0400
x MPC_THR_XY_MARG [563,1112] : 0.3000
x MPC_TILTMAX_AIR [564,1113] : 45.0000
x MPC_TILTMAX_LND [565,1114] : 12.0000
x + MPC_TKO_RAMP_T [566,1115] : 2.0000
x MPC_TKO_SPEED [567,1116] : 1.5000
x MPC_USE_HTE [568,1117] : 1
x MPC_VELD_LP [569,1118] : 5.0000
x + MPC_VEL_MANUAL [570,1119] : 20.0000
x MPC_VEL_MAN_BACK [571,1120] : -1.0000
x MPC_VEL_MAN_SIDE [572,1121] : -1.0000
x + MPC_XY_CRUISE [573,1122] : 15.0000
x MPC_XY_ERR_MAX [574,1123] : 2.0000
x + MPC_XY_MAN_EXPO [575,1124] : 0.4500
x MPC_XY_P [576,1125] : 0.9500
x MPC_XY_TRAJ_P [577,1126] : 0.5000
x MPC_XY_VEL_ALL [578,1127] : -10.0000
x MPC_XY_VEL_D_ACC [579,1128] : 0.2000
x MPC_XY_VEL_I_ACC [580,1129] : 0.4000
x + MPC_XY_VEL_MAX [581,1130] : 20.0000
x MPC_XY_VEL_P_ACC [582,1131] : 1.8000
x MPC_YAWRAUTO_MAX [583,1132] : 45.0000
x + MPC_YAW_EXPO [584,1133] : 0.3000
x MPC_YAW_MODE [585,1134] : 0
x + MPC_Z_MAN_EXPO [586,1135] : 0.1000
x + MPC_Z_P [587,1136] : 5.0000
x MPC_Z_VEL_ALL [588,1137] : -3.0000
x MPC_Z_VEL_D_ACC [589,1138] : 0.0000
x MPC_Z_VEL_I_ACC [590,1139] : 2.0000
x + MPC_Z_VEL_MAX_DN [591,1140] : 4.0000
x + MPC_Z_VEL_MAX_UP [592,1141] : 10.0000
x + MPC_Z_VEL_P_ACC [593,1142] : 8.0000
x + MPC_Z_V_AUTO_DN [594,1143] : 3.0000
x + MPC_Z_V_AUTO_UP [595,1144] : 10.0000
x NAV_ACC_RAD [596,1148] : 10.0000
x NAV_DLL_ACT [597,1149] : 0
x NAV_FORCE_VT [598,1150] : 1
x NAV_FW_ALTL_RAD [599,1151] : 5.0000
x NAV_FW_ALT_RAD [600,1152] : 10.0000
x NAV_LOITER_RAD [601,1153] : 80.0000
x NAV_MC_ALT_RAD [602,1154] : 0.8000
x NAV_MIN_LTR_ALT [603,1155] : -1.0000
x NAV_RCL_ACT [604,1156] : 2
x NAV_TRAFF_AVOID [605,1157] : 1
x NAV_TRAFF_A_HOR [606,1158] : 500.0000
x NAV_TRAFF_A_VER [607,1159] : 500.0000
x NAV_TRAFF_COLL_T [608,1160] : 60
x PLD_BTOUT [609,1215] : 5.0000
x PLD_FAPPR_ALT [610,1216] : 0.1000
x PLD_HACC_RAD [611,1217] : 0.2000
x PLD_MAX_SRCH [612,1218] : 3
x PLD_SRCH_ALT [613,1219] : 10.0000
x PLD_SRCH_TOUT [614,1220] : 10.0000
x RC10_DZ [615,1267] : 0.0000
x RC10_MAX [616,1268] : 2000.0000
x RC10_MIN [617,1269] : 1000.0000
x RC10_REV [618,1270] : 1.0000
x RC10_TRIM [619,1271] : 1500.0000
x RC11_DZ [620,1272] : 0.0000
x RC11_MAX [621,1273] : 2000.0000
x RC11_MIN [622,1274] : 1000.0000
x RC11_REV [623,1275] : 1.0000
x RC11_TRIM [624,1276] : 1500.0000
x RC12_DZ [625,1277] : 0.0000
x RC12_MAX [626,1278] : 2000.0000
x RC12_MIN [627,1279] : 1000.0000
x RC12_REV [628,1280] : 1.0000
x RC12_TRIM [629,1281] : 1500.0000
x RC13_DZ [630,1282] : 0.0000
x RC13_MAX [631,1283] : 2000.0000
x RC13_MIN [632,1284] : 1000.0000
x RC13_REV [633,1285] : 1.0000
x RC13_TRIM [634,1286] : 1500.0000
x RC14_DZ [635,1287] : 0.0000
x RC14_MAX [636,1288] : 2000.0000
x RC14_MIN [637,1289] : 1000.0000
x RC14_REV [638,1290] : 1.0000
x RC14_TRIM [639,1291] : 1500.0000
x RC15_DZ [640,1292] : 0.0000
x RC15_MAX [641,1293] : 2000.0000
x RC15_MIN [642,1294] : 1000.0000
x RC15_REV [643,1295] : 1.0000
x RC15_TRIM [644,1296] : 1500.0000
x RC16_DZ [645,1297] : 0.0000
x RC16_MAX [646,1298] : 2000.0000
x RC16_MIN [647,1299] : 1000.0000
x RC16_REV [648,1300] : 1.0000
x RC16_TRIM [649,1301] : 1500.0000
x RC17_DZ [650,1302] : 0.0000
x RC17_MAX [651,1303] : 2000.0000
x RC17_MIN [652,1304] : 1000.0000
x RC17_REV [653,1305] : 1.0000
x RC17_TRIM [654,1306] : 1500.0000
x RC18_DZ [655,1307] : 0.0000
x RC18_MAX [656,1308] : 2000.0000
x RC18_MIN [657,1309] : 1000.0000
x RC18_REV [658,1310] : 1.0000
x RC18_TRIM [659,1311] : 1500.0000
x RC1_DZ [660,1312] : 10.0000
x + RC1_MAX [661,1313] : 2007.0000
x + RC1_MIN [662,1314] : 989.0000
x RC1_REV [663,1315] : 1.0000
x + RC1_TRIM [664,1316] : 1496.0000
x RC2_DZ [665,1317] : 10.0000
x + RC2_MAX [666,1318] : 2005.0000
x RC2_MIN [667,1319] : 1000.0000
x RC2_REV [668,1320] : 1.0000
x + RC2_TRIM [669,1321] : 1000.0000
x RC3_DZ [670,1322] : 10.0000
x + RC3_MAX [671,1323] : 1972.0000
x + RC3_MIN [672,1324] : 1002.0000
x RC3_REV [673,1325] : 1.0000
x + RC3_TRIM [674,1326] : 1449.0000
x RC4_DZ [675,1327] : 10.0000
x + RC4_MAX [676,1328] : 1993.0000
x + RC4_MIN [677,1329] : 1027.0000
x RC4_REV [678,1330] : 1.0000
x + RC4_TRIM [679,1331] : 1496.0000
x RC5_DZ [680,1332] : 10.0000
x + RC5_MAX [681,1333] : 1980.0000
x + RC5_MIN [682,1334] : 1030.0000
x RC5_REV [683,1335] : 1.0000
x + RC5_TRIM [684,1336] : 1505.0000
x RC6_DZ [685,1337] : 10.0000
x + RC6_MAX [686,1338] : 1980.0000
x + RC6_MIN [687,1339] : 1030.0000
x RC6_REV [688,1340] : 1.0000
x + RC6_TRIM [689,1341] : 1505.0000
x RC7_DZ [690,1342] : 10.0000
x + RC7_MAX [691,1343] : 1980.0000
x + RC7_MIN [692,1344] : 1030.0000
x RC7_REV [693,1345] : 1.0000
x + RC7_TRIM [694,1346] : 1505.0000
x RC8_DZ [695,1347] : 10.0000
x + RC8_MAX [696,1348] : 1980.0000
x + RC8_MIN [697,1349] : 1030.0000
x RC8_REV [698,1350] : 1.0000
x + RC8_TRIM [699,1351] : 1505.0000
x RC9_DZ [700,1352] : 0.0000
x RC9_MAX [701,1353] : 2000.0000
x RC9_MIN [702,1354] : 1000.0000
x RC9_REV [703,1355] : 1.0000
x RC9_TRIM [704,1356] : 1500.0000
x RC_ARMSWITCH_TH [705,1357] : 0.7500
x + RC_CHAN_CNT [706,1358] : 16
x RC_ENG_MOT_TH [707,1360] : 0.7500
x RC_FAILS_THR [708,1361] : 0
x RC_GEAR_TH [709,1362] : 0.7500
x RC_KILLSWITCH_TH [710,1364] : 0.7500
x RC_LOITER_TH [711,1365] : 0.7500
x RC_MAP_ACRO_SW [712,1366] : 0
x + RC_MAP_ARM_SW [713,1367] : 4
x RC_MAP_AUX1 [714,1368] : 0
x RC_MAP_AUX2 [715,1369] : 0
x RC_MAP_AUX3 [716,1370] : 0
x RC_MAP_AUX4 [717,1371] : 0
x RC_MAP_AUX5 [718,1372] : 0
x RC_MAP_AUX6 [719,1373] : 0
x RC_MAP_ENG_MOT [720,1374] : 0
x RC_MAP_FAILSAFE [721,1375] : 0
x RC_MAP_FLAPS [722,1376] : 0
x + RC_MAP_FLTMODE [723,1377] : 6
x RC_MAP_FLTM_BTN [724,1378] : 0
x RC_MAP_GEAR_SW [725,1379] : 0
x + RC_MAP_KILL_SW [726,1380] : 5
x RC_MAP_LOITER_SW [727,1381] : 0
x RC_MAP_MAN_SW [728,1382] : 0
x RC_MAP_MODE_SW [729,1383] : 0
x RC_MAP_OFFB_SW [730,1384] : 0
x RC_MAP_PARAM1 [731,1385] : 0
x RC_MAP_PARAM2 [732,1386] : 0
x RC_MAP_PARAM3 [733,1387] : 0
x + RC_MAP_PITCH [734,1388] : 3
x RC_MAP_POSCTL_SW [735,1389] : 0
x RC_MAP_RATT_SW [736,1390] : 0
x RC_MAP_RETURN_SW [737,1391] : 0
x + RC_MAP_ROLL [738,1392] : 1
x RC_MAP_STAB_SW [739,1393] : 0
x + RC_MAP_THROTTLE [740,1394] : 2
x RC_MAP_TRANS_SW [741,1395] : 0
x + RC_MAP_YAW [742,1396] : 4
x RC_OFFB_TH [743,1397] : 0.7500
x RC_RETURN_TH [744,1398] : 0.7500
x RC_TRANS_TH [745,1402] : 0.7500
x RTL_CONE_ANG [746,1403] : 45
x RTL_DESCEND_ALT [747,1404] : 30.0000
x RTL_HDG_MD [748,1405] : 0
x RTL_LAND_DELAY [749,1406] : 0.0000
x RTL_LOITER_RAD [750,1407] : 80.0000
x RTL_MIN_DIST [751,1408] : 10.0000
x RTL_PLD_MD [752,1409] : 0
x RTL_RETURN_ALT [753,1410] : 60.0000
x RTL_TIME_FACTOR [754,1411] : 1.1000
x RTL_TIME_MARGIN [755,1412] : 100
x RTL_TYPE [756,1413] : 0
x SDLOG_BOOT_BAT [757,1424] : 0
x SDLOG_DIRS_MAX [758,1425] : 0
x SDLOG_MISSION [759,1428] : 0
x SDLOG_MODE [760,1429] : 0
x + SDLOG_PROFILE [761,1430] : 129
x SDLOG_UTC_OFFSET [762,1431] : 0
x SDLOG_UUID [763,1432] : 1
x SENS_BARO_QNH [764,1434] : 1013.2500
x SENS_BARO_RATE [765,1435] : 20.0000
x SENS_BOARD_ROT [766,1436] : 0
x + SENS_BOARD_X_OFF [767,1437] : 1.5968
x + SENS_BOARD_Y_OFF [768,1438] : -0.2765
x SENS_BOARD_Z_OFF [769,1439] : 0.0000
x SENS_DPRES_OFF [770,1442] : 0.0000
x SENS_GPS_MASK [771,1484] : 7
x SENS_GPS_PRIME [772,1485] : 0
x SENS_GPS_TAU [773,1486] : 10.0000
x SENS_IMU_AUTOCAL [774,1487] : 0
x SENS_IMU_MODE [775,1488] : 1
x SENS_MAG_AUTOCAL [776,1494] : 0
x SENS_MAG_AUTOROT [777,1495] : 0
x SENS_MAG_MODE [778,1496] : 1
x SENS_MAG_RATE [779,1497] : 15.0000
x SENS_MAG_SIDES [780,1498] : 63
x SYS_AUTOCONFIG [781,1645] : 0
x + SYS_AUTOSTART [782,1646] : 4001
x SYS_CAL_TDEL [783,1651] : 24
x SYS_CAL_TMAX [784,1652] : 10
x SYS_CAL_TMIN [785,1653] : 5
x SYS_FAC_CAL_MODE [786,1655] : 0
x SYS_FAILURE_EN [787,1656] : 0
x SYS_HAS_BARO [788,1657] : 1
x SYS_HAS_GPS [789,1658] : 1
x SYS_HAS_MAG [790,1659] : 1
x SYS_HAS_NUM_DIST [791,1660] : 0
x SYS_HITL [792,1661] : 0
x SYS_MC_EST_GROUP [793,1662] : 2
x SYS_RGB_MAXBRT [794,1663] : 1.0000
x SYS_STCK_EN [795,1664] : 1
x SYS_VEHICLE_RESP [796,1666] : -0.4000
x TC_A_ENABLE [797,1740] : 0
x + TC_B0_ID [798,1741] : 12018473
x + TC_B0_TMAX [799,1742] : 72.3200
x + TC_B0_TMIN [800,1743] : 61.7500
x + TC_B0_TREF [801,1744] : 67.0300
x + TC_B0_X0 [802,1745] : 0.5761
x + TC_B0_X1 [803,1746] : -2.0090
x TC_B0_X2 [804,1747] : 0.0000
x TC_B0_X3 [805,1748] : 0.0000
x TC_B0_X4 [806,1749] : 0.0000
x TC_B0_X5 [807,1750] : 0.0000
x TC_B1_ID [808,1751] : 0
x TC_B1_TMAX [809,1752] : 75.0000
x TC_B1_TMIN [810,1753] : 5.0000
x TC_B1_TREF [811,1754] : 40.0000
x TC_B1_X0 [812,1755] : 0.0000
x TC_B1_X1 [813,1756] : 0.0000
x TC_B1_X2 [814,1757] : 0.0000
x TC_B1_X3 [815,1758] : 0.0000
x TC_B1_X4 [816,1759] : 0.0000
x TC_B1_X5 [817,1760] : 0.0000
x TC_B2_ID [818,1761] : 0
x TC_B2_TMAX [819,1762] : 75.0000
x TC_B2_TMIN [820,1763] : 5.0000
x TC_B2_TREF [821,1764] : 40.0000
x TC_B2_X0 [822,1765] : 0.0000
x TC_B2_X1 [823,1766] : 0.0000
x TC_B2_X2 [824,1767] : 0.0000
x TC_B2_X3 [825,1768] : 0.0000
x TC_B2_X4 [826,1769] : 0.0000
x TC_B2_X5 [827,1770] : 0.0000
x TC_B3_ID [828,1771] : 0
x TC_B3_TMAX [829,1772] : 75.0000
x TC_B3_TMIN [830,1773] : 5.0000
x TC_B3_TREF [831,1774] : 40.0000
x TC_B3_X0 [832,1775] : 0.0000
x TC_B3_X1 [833,1776] : 0.0000
x TC_B3_X2 [834,1777] : 0.0000
x TC_B3_X3 [835,1778] : 0.0000
x TC_B3_X4 [836,1779] : 0.0000
x TC_B3_X5 [837,1780] : 0.0000
x + TC_B_ENABLE [838,1781] : 1
x TC_G_ENABLE [839,1846] : 0
x + THR_MDL_FAC [840,1866] : 0.9000
x TRIG_MODE [841,1872] : 0
x UAVCAN_ENABLE [842,1913] : 0
x + VOXL_ESC_BAUD [843,2095] : 2000000
x + VOXL_ESC_CONFIG [844,2096] : 1
x + VOXL_ESC_FUNC1 [845,2097] : 102
x + VOXL_ESC_FUNC2 [846,2098] : 103
x + VOXL_ESC_FUNC3 [847,2099] : 101
x + VOXL_ESC_FUNC4 [848,2100] : 104
x VOXL_ESC_MODE [849,2101] : 0
x VOXL_ESC_PUB_BST [850,2102] : 1
x VOXL_ESC_REV [851,2103] : 0
x + VOXL_ESC_RPM_MAX [852,2104] : 12000
x + VOXL_ESC_RPM_MIN [853,2105] : 2000
x VOXL_ESC_SDIR1 [854,2106] : 0
x VOXL_ESC_SDIR2 [855,2107] : 0
x VOXL_ESC_SDIR3 [856,2108] : 0
x VOXL_ESC_SDIR4 [857,2109] : 0
x VOXL_ESC_T_COSP [858,2110] : 0.9900
x VOXL_ESC_T_DEAD [859,2111] : 20
x VOXL_ESC_T_EXPO [860,2112] : 35
x VOXL_ESC_T_MINF [861,2113] : 0.1500
x VOXL_ESC_T_OVER [862,2114] : 0
x VOXL_ESC_T_PERC [863,2115] : 90
x VOXL_ESC_T_WARN [864,2116] : 0
x + VOXL_ESC_VLOG [865,2117] : 1
x VTO_LOITER_ALT [866,2118] : 80.0000
x VT_B_DEC_MSS [867,2123] : 2.0000
x WV_EN [868,2156] : 0
x WV_GAIN [869,2157] : 1.0000
x WV_ROLL_MIN [870,2158] : 1.0000
x WV_YRATE_MAX [871,2159] : 90.0000
x XRCE_DDS_DOM_ID [872,2160] : 0
x XRCE_DDS_KEY [873,2161] : 1874/2162 parameters used.
-
@Eric-Katzfey Please, advise if we can setup phone call or video call to resolve the issue?
Our team has an upcoming event that require the drone to be functional.
Also, advise if we need to ship it to your team to fix it otherwise. -
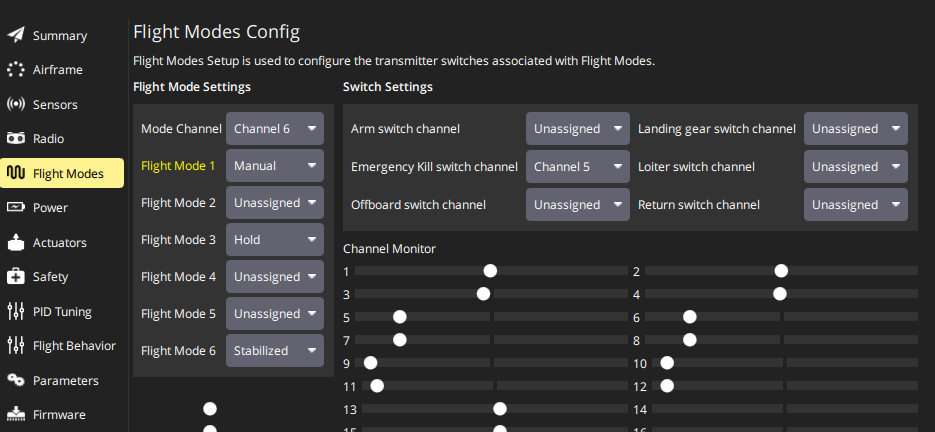
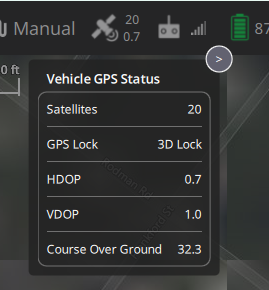
@oiler251 Below is the Flight Mode configuration and GPS status.
-
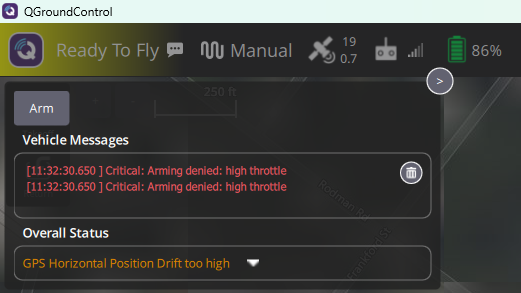
@Eric-Katzfey Below is the error message on QGroundControl.
-
@oiler251 Why can't you set EKF2_GPS_CHECK to 1? What happens when you try? Your last screen shot shows 2 errors. The high throttle error just means you have to put throttle to lowest position before arming.
-
@oiler251 Here's what ChatGPT says:
The pre-arm message “GPS Horizontal Position Drift too high” is gated by **EKF2_REQ_HDRIFT**. If you truly need to relax that check, raise **EKF2_REQ_HDRIFT** (default is often ~0.5 m/s). For example, set it closer to **1.0 m/s** so the EKF will accept more horizontal drift while on the ground and allow arming. The related on-ground GPS checks are toggled by the **EKF2_GPS_CHECK** bitmask (bits **5** and **7** cover horizontal drift and horizontal speed, respectively), but changing the threshold via EKF2_REQ_HDRIFT is the usual tweak. ([PX4 Documentation][1]) Quick steps in QGroundControl: Parameters → search “EKF2_REQ_HDRIFT” → increase slightly → write & reboot. ⚠️ Note: loosening this check masks a real reception problem (antenna placement, multipath, EMI). If possible, fix the root cause instead of weakening safety checks. ([discuss.px4.io][2]) [1]: https://docs.px4.io/v1.14/en/advanced_config/parameter_reference.html?utm_source=chatgpt.com "Parameter Reference | PX4 User Guide (v1.14)" [2]: https://discuss.px4.io/t/pixhawk-4-preflight-gps-horizontal-pos-error-too-high/21010?utm_source=chatgpt.com "Pixhawk 4 preflight gps horizontal pos error too high" -
@Eric-Katzfey The current value of EKF2_GPS_CHECK is 245. I clicked on the number and replaced the 245 with 1 and clicked save button. It does not replace the number.
Regarding throttle error msg, it appears when the left gimble is to the bottom right corner which is what the VOXL developer bootcamp instruction.Is there an expert who can support over the phone or video call?
If there is none, then can you provide your supervisor contact information that i can forward to my manager to take care of the issue.
My team need basic drone functionality where we can take off the drone and land. -
@oiler251 It seems like in QGC you cannot just change that value directly, you have to uncheck all of the boxes instead of the satellite count one. Then it will go to 1. Then you can save, reboot and try to arm. I think before doing that, however, you should first try to change EKF2_REQ_HDRIFT to 1.0 as suggested. That is a more precise way to make the adjustment.
-
@oiler251 For arming I would configure an arm switch instead of using the arm gesture (moving throttle to bottom right).
-
@oiler251 Please be aware that the Starling 2 Max is a development drone and it is targeted for experienced developers who already are comfortable with using PX4, QGroundControl, Linux, and embedded systems. Drones can be extremely dangerous and should only be setup and flown by personnel with the required knowledge. Safety must be everyone's first priority.
-
@oiler251 ModalAI does not provide free phone or video conference support. You can reach out to Ascend engineering if you desire paid consulting. https://www.ascendengineer.com/
-
@Eric-Katzfey Can you provide simple instructions on how to configure an arm switch instead of using the arm gesture (moving throttle to bottom right)?
Also, can you provide the typical Radio and Flight modes configurations maintained by ModalAI team prior sending the controller and drone to the buyer? I would like to try the same configuration to arm the drone? -
@oiler251 The PX4 User Manual has some documentation here: https://docs.px4.io/main/en/advanced_config/prearm_arm_disarm. QGroundControl User Manual has some documentation here: https://docs.qgroundcontrol.com/master/en/qgc-user-guide/setup_view/flight_modes_px4.html#flight-mode-settings
-
@oiler251 You should be able to arm with the arm gesture (e.g. moving the left stick to bottom right). But since that isn't working I suggested to configure an arm switch. I do see that the RC2_TRIM parameter is set to 1000.0 which is odd. Normally it is around 1500.00. When you look at the QGC radio configuration screen and you move the sticks around do they look normal? And when sticks are centered are they all showing that they centered on the graphics? You could try setting RC2_TRIM to 1500.0 and see if that allows you to arm with the gesture. Please make sure you have the propellers removed when doing this testing!