Hadron + 3x Tracking Camera
-
Hi Devs,
hi @Alex-KushleyevWe are currently integrating an FLIR Hadron camera with our VOXL2-based drone.
As we wish to utilize the triple tracking capability, we also aim to connect three tracking cameras to the board.
Is there any way this setup is possible?We have the M0181 board that should connect the Hadron to the VOXL2 flight controller.
As far as we understand the documentation, this board is only supported when plugged into the J7 connector of the flight controller.
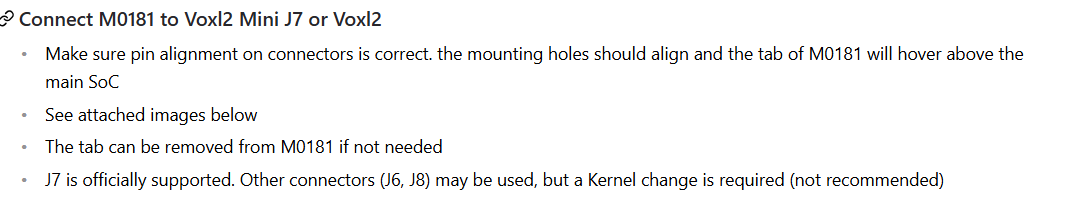
(See also: https://docs.modalai.com/voxl2-hadron/#connect-m0181-to-voxl2-mini-j7-or-voxl2)
This setup would make it impossible to connect the M0173 Starling 2 Front End, which would give us the possibility to run the tracking cameras.Is there any other configuration we can use that would allow us to use the Hadron and the three tracking cameras in parallel?
Thank you very much for your help!
Best regards,
Fabian -
Hi Devs,
hi @Alex-KushleyevWe are currently integrating an FLIR Hadron camera with our VOXL2-based drone.
As we wish to utilize the triple tracking capability, we also aim to connect three tracking cameras to the board.
Is there any way this setup is possible?We have the M0181 board that should connect the Hadron to the VOXL2 flight controller.
As far as we understand the documentation, this board is only supported when plugged into the J7 connector of the flight controller.
(See also: https://docs.modalai.com/voxl2-hadron/#connect-m0181-to-voxl2-mini-j7-or-voxl2)
This setup would make it impossible to connect the M0173 Starling 2 Front End, which would give us the possibility to run the tracking cameras.Is there any other configuration we can use that would allow us to use the Hadron and the three tracking cameras in parallel?
Thank you very much for your help!
Best regards,
Fabian@wifa799 ,
Please see the following post : https://forum.modalai.com/topic/4274/hadron-boards-to-order/ (at the end)
In short, Hadron works in J8 only using the kernel variant that works with M0173. I need to update the documentation.
So you can have 3x tracking, 1x hires, 1x TOF, and Hadron (IR + OV64B hires). That is 7 cameras which is the maximum number of MIPI cameras that VOXL2 supports. I know you did not ask for the other hires camera (recommended IMX412 M0161 module), but just wanted to mention that.
This set up is not standard, but you would just need to set up for a standard Starling camera setup (C27) then go from there.. copy the sensormodules (camera drivers) for Boson in slot 4 and ov64b in slot 5 and update your
voxl-camera-server.conf. I can help you with that if needed.Alex
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login