Starling 2 - Voxl-dfs-server
-
Hello everyone.
I'm configuring a Starling 2, which I can't get to be able to detect obstacles. When I activate the voxl-dfs-server service I see that it is active but not running.
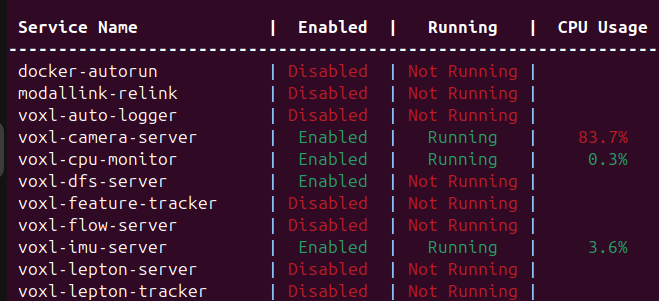
When I access the service, I see this:
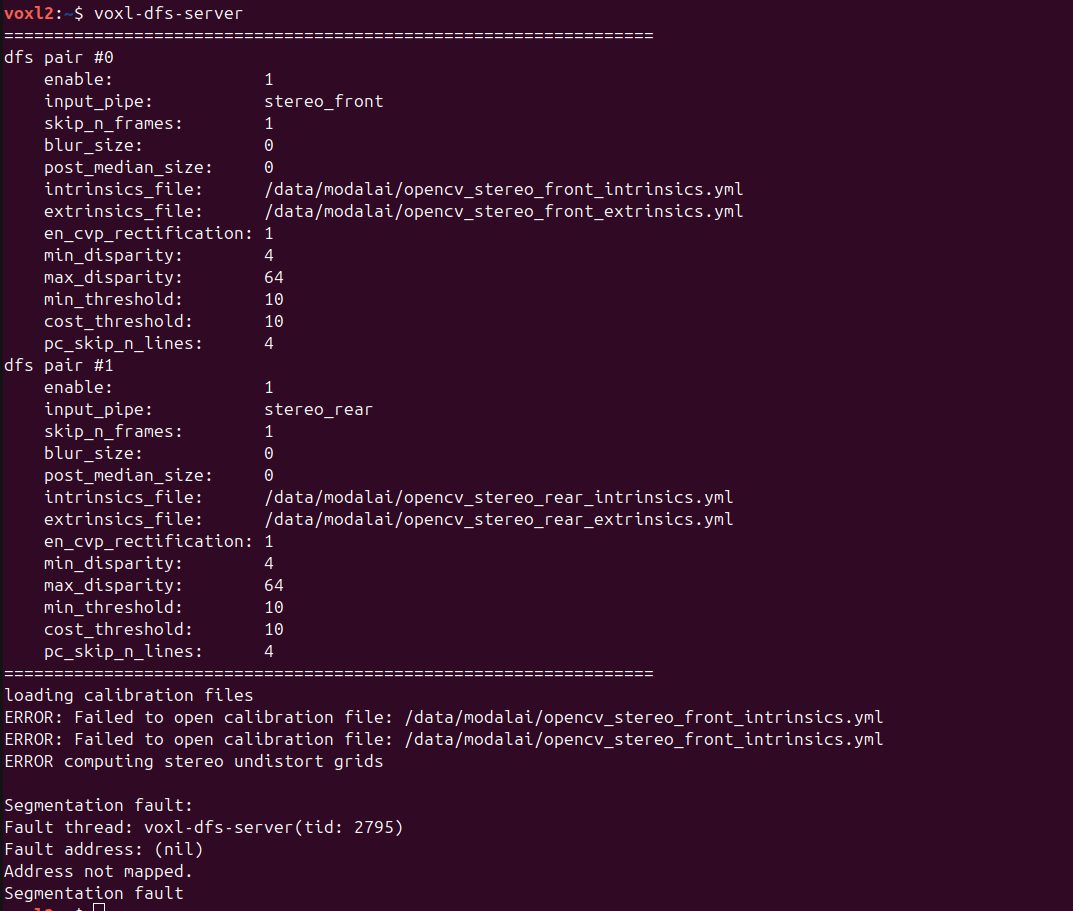
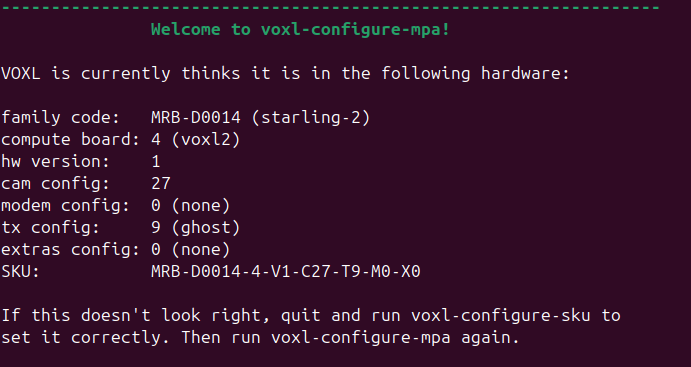
When running the voxl-configure-mpa command I get this:
And the list of available pipes are:
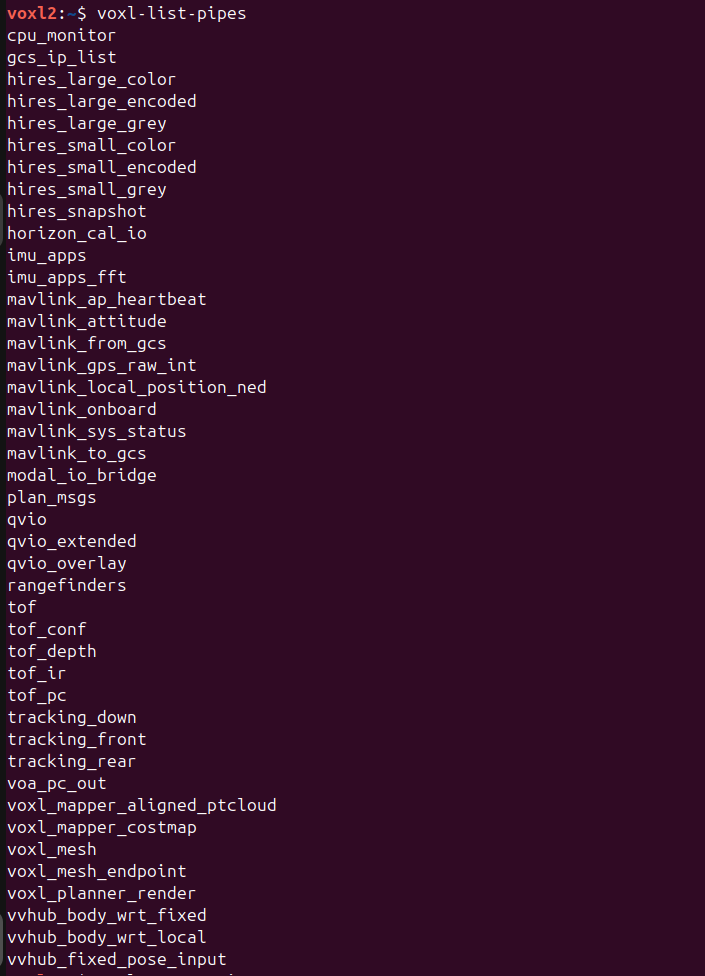
I understand that the voxl-dfs-server is looking for the stereo_rear and stereo_front cameras, but the Starling does not have them - the ones I understand it has are Tracking_front, rear and down.
How can I change that setting? How can I make Starling 2 avoid obstacles?Thank you so much
-
Hello everyone.
I'm configuring a Starling 2, which I can't get to be able to detect obstacles. When I activate the voxl-dfs-server service I see that it is active but not running.
When I access the service, I see this:
When running the voxl-configure-mpa command I get this:
And the list of available pipes are:
I understand that the voxl-dfs-server is looking for the stereo_rear and stereo_front cameras, but the Starling does not have them - the ones I understand it has are Tracking_front, rear and down.
How can I change that setting? How can I make Starling 2 avoid obstacles?Thank you so much
-
@valvarez Starling 2 uses the TOF sensor, not stereo cameras, for depth information.
-
@valvarez Starling 2 uses the TOF sensor, not stereo cameras, for depth information.
@Eric-Katzfey I'm having the same issue on the VOXL Starling, the /etc/modalai/voxl-dfs-server.conf file is set to use the rear and front stereo intrinsics.yml and extrinstics.yml which don't exist due to what you just mentioned. Is there a specific setup/files we should set the voxl-dfs-server.conf to use ?
-
@Eric-Katzfey I'm having the same issue on the VOXL Starling, the /etc/modalai/voxl-dfs-server.conf file is set to use the rear and front stereo intrinsics.yml and extrinstics.yml which don't exist due to what you just mentioned. Is there a specific setup/files we should set the voxl-dfs-server.conf to use ?
@JoeAR_21 DFS is Depth from Stereo. Starling 2 does not have stereo cameras so cannot use DFS. Starling 2 uses TOF for depth information instead.
-
@JoeAR_21 DFS is Depth from Stereo. Starling 2 does not have stereo cameras so cannot use DFS. Starling 2 uses TOF for depth information instead.
@Eric-Katzfey Is there an existing service/configuration for collision avoidance on these platforms or do we have to implement our own using the TOF sensor data?
-
@Eric-Katzfey Is there an existing service/configuration for collision avoidance on these platforms or do we have to implement our own using the TOF sensor data?
@JoeAR_21 voxl-vision-hub handles VOA, not voxl-dfs-server
You can see the tof callback function in voa_manager here: https://gitlab.com/voxl-public/voxl-sdk/services/voxl-vision-hub/-/blob/master/src/voa_manager.c?ref_type=heads#L380
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login