Hi-res IMX214 (M0024-2) Pink Hue Issue
-
Re: Hi-res IMX214 (M0024-2) Color and Stuttering Issue
I went through the process linked in the above thread and successfully got rid of the green circle found in the center on the picture, but I am still dealing with pink/warm tones dominating the picture. This is causing issues with our color detection algorithm, and we are hoping for a correction to produce true colors.

-
Re: Hi-res IMX214 (M0024-2) Color and Stuttering Issue
I went through the process linked in the above thread and successfully got rid of the green circle found in the center on the picture, but I am still dealing with pink/warm tones dominating the picture. This is causing issues with our color detection algorithm, and we are hoping for a correction to produce true colors.
@zcurtis070 , please copy the tuning file that is specific to this camera module (M0024) to
/usr/lib/cameradirectory, as shown below and restartvoxl-camera-server:cp /usr/share/modalai/chi-cdk/tuned/com.qti.tuned.imx214_m0024.bin /usr/lib/camera/com.qti.tuned.imx214.binThis should resolve your issue.
-
@zcurtis070 , please copy the tuning file that is specific to this camera module (M0024) to
/usr/lib/cameradirectory, as shown below and restartvoxl-camera-server:cp /usr/share/modalai/chi-cdk/tuned/com.qti.tuned.imx214_m0024.bin /usr/lib/camera/com.qti.tuned.imx214.binThis should resolve your issue.
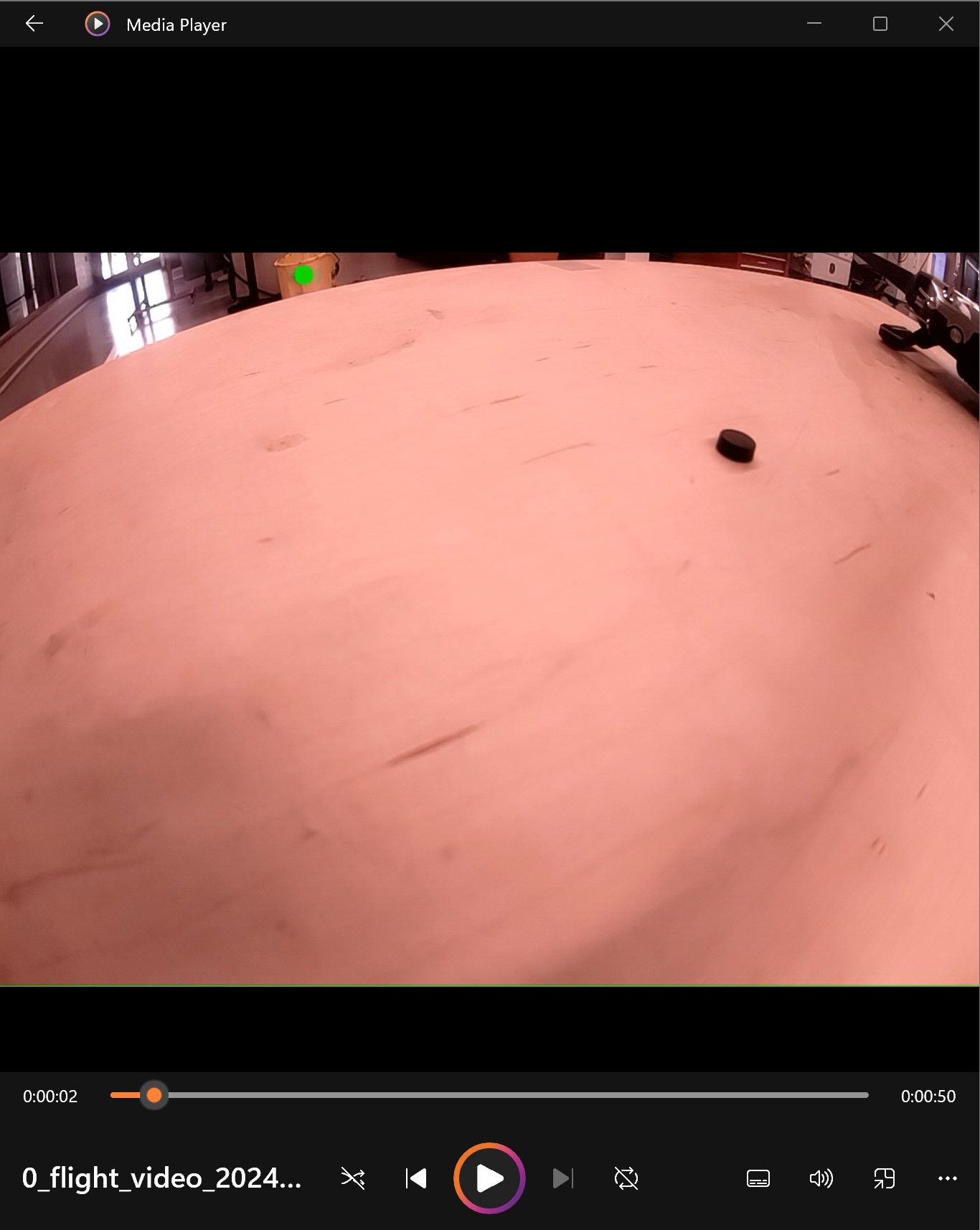
@Alex-Kushleyev this seems to have a positive effect but its not working perfectly and it doesn't work all the time. Inside on the workbench, I noticed that when I restart the voxl-camera-server it immediately shows up pink, but as soon as I lift the vehicle off the ground it seems to adjust settings and the color comes out closer to true color and what we are looking for (I have a video that show the behavior, but I am not sure how to post it here).
However, I took the vehicle outside to perform a test and I was not able to get the pink hue to go away. I tried restarting the camera server and tilting it around hoping it would auto adjust the settings, but I didn't have any luck. Do you have any other suggestions?
Before Restart
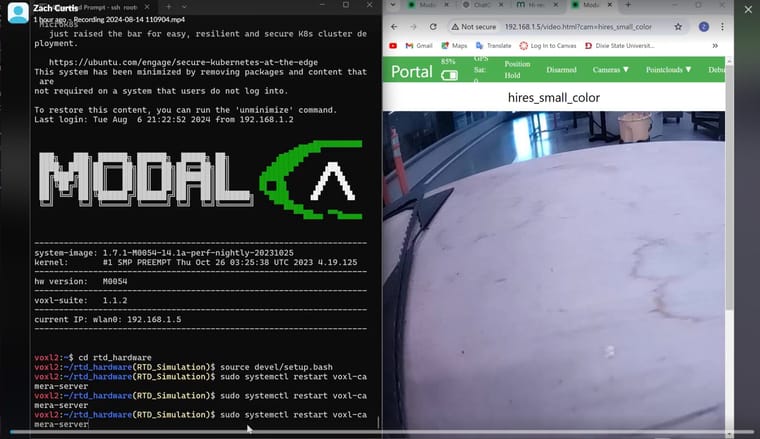
After Restart
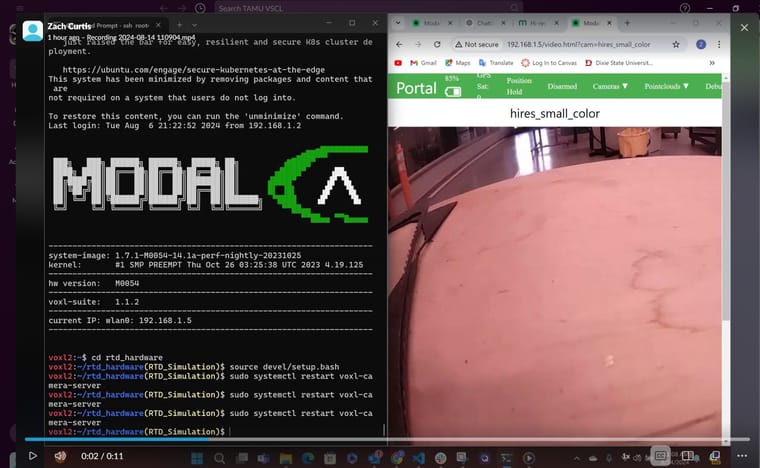
After Lifting which causes auto-adjust
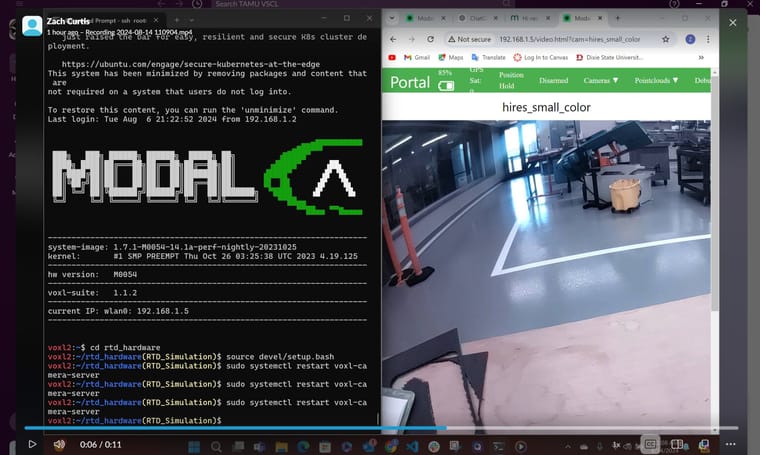
Outside:

-
@Alex-Kushleyev this seems to have a positive effect but its not working perfectly and it doesn't work all the time. Inside on the workbench, I noticed that when I restart the voxl-camera-server it immediately shows up pink, but as soon as I lift the vehicle off the ground it seems to adjust settings and the color comes out closer to true color and what we are looking for (I have a video that show the behavior, but I am not sure how to post it here).
However, I took the vehicle outside to perform a test and I was not able to get the pink hue to go away. I tried restarting the camera server and tilting it around hoping it would auto adjust the settings, but I didn't have any luck. Do you have any other suggestions?
Before Restart
After Restart
After Lifting which causes auto-adjust
Outside:
@zcurtis070 , I do see the improvement in the colors across the image (there is no discoloration in the middle), but I agree that it seems the Auto White Balance (AWB) is not kicking in sometimes.
We can investigate this. Can you please share the
/etc/modalai/voxl-camera-server.conffile so we can test the same configuration?Alex
-
@zcurtis070 , I do see the improvement in the colors across the image (there is no discoloration in the middle), but I agree that it seems the Auto White Balance (AWB) is not kicking in sometimes.
We can investigate this. Can you please share the
/etc/modalai/voxl-camera-server.conffile so we can test the same configuration?Alex
@Alex-Kushleyev Here is a copy and paste of the the voxl-camera-server.conf file that you requested. It won't allow me to attach the file itself.
/**
- voxl-camera-server Configuration File
- Each camera has configurations for up to 4 HAL3 streams:
-
previewstream for raw unprocessed images from CV cameras
-
small_video720p (ish) h264/h265 compressed for fpv video streaming
-
large_video4k (ish) h264/h265 for onboard video recording to disk
-
snapshotISP-processed JPG snapshots that get saved to disk
- on QRB5165 platforms (VOXL2 and VOXL2 mini) you can only have 3 of the 4 enabled
- This file is generated from default values by voxl-configure-cameras.
- Do not expect arbitrary resolutions to work, the ISP and video compression
- pipelines only support very specific resolutions.
- The default video compression mode is cqp or Constant Quantization Parameter
*/
{
"version": 0.1,
"cameras": [{
"type": "imx214",
"name": "hires",
"enabled": true,
"camera_id": 0,
"fps": 30,
"en_preview": false,
"preview_width": 640,
"preview_height": 480,
"en_raw_preview": false,
"en_small_video": true,
"small_video_width": 1024,
"small_video_height": 768,
"small_venc_mode": "h265",
"small_venc_br_ctrl": "cqp",
"small_venc_Qfixed": 30,
"small_venc_Qmin": 15,
"small_venc_Qmax": 40,
"small_venc_nPframes": 9,
"small_venc_mbps": 2,
"en_large_video": false,
"large_video_width": 4208,
"large_video_height": 3120,
"large_venc_mode": "h265",
"large_venc_br_ctrl": "cqp",
"large_venc_Qfixed": 38,
"large_venc_Qmin": 15,
"large_venc_Qmax": 50,
"large_venc_nPframes": 29,
"large_venc_mbps": 30,
"en_snapshot": true,
"en_snapshot_width": 4208,
"en_snapshot_height": 3120,
"ae_mode": "isp",
"ae_desired_msv": 60,
"exposure_min_us": 20,
"exposure_max_us": 33000,
"gain_min": 54,
"gain_max": 8000,
"exposure_soft_min_us": 5000,
"ae_filter_alpha": 0.600000023841858,
"ae_ignore_fraction": 0.20000000298023224,
"ae_slope": 0.05000000074505806,
"ae_exposure_period": 1,
"ae_gain_period": 1,
"ae_k_p_ns": 8000,
"ae_k_i_ns": 5,
"ae_max_i": 250
}]
}Zach
-
@Alex-Kushleyev Here is a copy and paste of the the voxl-camera-server.conf file that you requested. It won't allow me to attach the file itself.
/**
- voxl-camera-server Configuration File
- Each camera has configurations for up to 4 HAL3 streams:
-
previewstream for raw unprocessed images from CV cameras
-
small_video720p (ish) h264/h265 compressed for fpv video streaming
-
large_video4k (ish) h264/h265 for onboard video recording to disk
-
snapshotISP-processed JPG snapshots that get saved to disk
- on QRB5165 platforms (VOXL2 and VOXL2 mini) you can only have 3 of the 4 enabled
- This file is generated from default values by voxl-configure-cameras.
- Do not expect arbitrary resolutions to work, the ISP and video compression
- pipelines only support very specific resolutions.
- The default video compression mode is cqp or Constant Quantization Parameter
*/
{
"version": 0.1,
"cameras": [{
"type": "imx214",
"name": "hires",
"enabled": true,
"camera_id": 0,
"fps": 30,
"en_preview": false,
"preview_width": 640,
"preview_height": 480,
"en_raw_preview": false,
"en_small_video": true,
"small_video_width": 1024,
"small_video_height": 768,
"small_venc_mode": "h265",
"small_venc_br_ctrl": "cqp",
"small_venc_Qfixed": 30,
"small_venc_Qmin": 15,
"small_venc_Qmax": 40,
"small_venc_nPframes": 9,
"small_venc_mbps": 2,
"en_large_video": false,
"large_video_width": 4208,
"large_video_height": 3120,
"large_venc_mode": "h265",
"large_venc_br_ctrl": "cqp",
"large_venc_Qfixed": 38,
"large_venc_Qmin": 15,
"large_venc_Qmax": 50,
"large_venc_nPframes": 29,
"large_venc_mbps": 30,
"en_snapshot": true,
"en_snapshot_width": 4208,
"en_snapshot_height": 3120,
"ae_mode": "isp",
"ae_desired_msv": 60,
"exposure_min_us": 20,
"exposure_max_us": 33000,
"gain_min": 54,
"gain_max": 8000,
"exposure_soft_min_us": 5000,
"ae_filter_alpha": 0.600000023841858,
"ae_ignore_fraction": 0.20000000298023224,
"ae_slope": 0.05000000074505806,
"ae_exposure_period": 1,
"ae_gain_period": 1,
"ae_k_p_ns": 8000,
"ae_k_i_ns": 5,
"ae_max_i": 250
}]
}Zach
@zcurtis070 , I am sorry for the delay.
I would like to help you with this but i need some more information. Does the white balance appear to ever work properly outdoors? (like sometimes it works fine and sometimes does not "kick in"?)
Also, are you able to re-build
voxl-camera-serverby yourself, i may have a few suggestions for you to try (different white balance modes), it would be easier if you can make the change in the code and re-build the camera server yourself.Additionally, i am going to look into adjusting the RGB gains on the camera itself so that the image comes back more correct in the first place so that AWB has easier time doing a better job.
While we are trying to get this fixed, you may also consider pre-processing the image by running a white balance algorithm (there are some options if you search online) to normalize the colors. I know that ideally you would get a well-balanced image, but if that is not working well, you can try to do it yourself.
A nice read on this topic : https://pyimagesearch.com/2021/02/15/automatic-color-correction-with-opencv-and-python/
Another example : https://jmanansala.medium.com/image-processing-with-python-color-correction-using-white-balancing-6c6c749886de
Alex
-
@zcurtis070 , I am sorry for the delay.
I would like to help you with this but i need some more information. Does the white balance appear to ever work properly outdoors? (like sometimes it works fine and sometimes does not "kick in"?)
Also, are you able to re-build
voxl-camera-serverby yourself, i may have a few suggestions for you to try (different white balance modes), it would be easier if you can make the change in the code and re-build the camera server yourself.Additionally, i am going to look into adjusting the RGB gains on the camera itself so that the image comes back more correct in the first place so that AWB has easier time doing a better job.
While we are trying to get this fixed, you may also consider pre-processing the image by running a white balance algorithm (there are some options if you search online) to normalize the colors. I know that ideally you would get a well-balanced image, but if that is not working well, you can try to do it yourself.
A nice read on this topic : https://pyimagesearch.com/2021/02/15/automatic-color-correction-with-opencv-and-python/
Another example : https://jmanansala.medium.com/image-processing-with-python-color-correction-using-white-balancing-6c6c749886de
Alex
That pink hue usually ends up being related to white balance or ISP tuning rather than the sensor itself. I’ve also seen it happen under certain lighting conditions where the auto settings overcompensate a bit.
Might be worth checking the raw output vs processed output to narrow it down. If the RAW image looks fine, then it’s probably somewhere in the color pipeline.
Also, for comparing the tint between frames, I’ve used https://colorpickerimage.org/ before to inspect the actual RGB values in different areas of the image. Makes it easier to confirm whether the pink cast is consistent or only affecting highlights/shadows.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login