Invalid local position
-
Okay, While I was waiting for your reply I went ahead and checked all of the cables and unplugged and re-plugged all of the cameras on the board and now I am getting this from the services:
Service Name | Enabled | Running | CPU Usage -------------------------------------------------------------- docker-autorun | Disabled | Not Running | Not Running docker-daemon | Disabled | Not Running | Not Running modallink-relink | Disabled | Not Running | Not Running voxl-camera-server | Enabled | Running | 7.5% voxl-cpu-monitor | Enabled | Running | 0.0% voxl-dfs-server | Enabled | Running | 10.0% voxl-imu-server | Enabled | Running | 1.9% voxl-modem | Disabled | Not Running | Not Running voxl-qvio-server | Enabled | Running | 2.2% voxl-streamer | Disabled | Not Running | Not Running voxl-tag-detector | Enabled | Running | 4.1% voxl-tflite-server | Enabled | Running | 0.0% voxl-time-sync | Disabled | Not Running | Not Running voxl-vision-px4 | Enabled | Running | 2.0% -
Are you still not getting localization data?
-
Still getting invalid local position data
-
Heres the output from QGC:
nsh> ekf2 status INFO [ekf2] local position: invalid INFO [ekf2] global position: invalid INFO [ekf2] time slip: 0 us ekf2: update: 8677 events, 49546us elapsed, 5.71us avg, min 1us max 94us 4.090us rms nsh> listener vehicle_visual_odometry TOPIC: vehicle_visual_odometry vehicle_odometry_s timestamp: 431364179 (297.960915 seconds ago) timestamp_sample: 431346994 (17185 us before timestamp) x: -682.8690 y: -951.3774 z: -868.9987 q: [0.9878, -0.0083, 0.0614, -0.1428] q_offset: [0.0000, 0.0000, 0.0000, 0.0000] pose_covariance: [nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan] vx: 0.0002 vy: 0.0009 vz: -0.0032 rollspeed: 0.0095 pitchspeed: 0.0000 yawspeed: 0.0000 velocity_covariance: [nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan, nan] local_frame: 1 velocity_frame: 3 nsh> -
Do you see data from
voxl-inspect-qvio -
Yes, but it is very iffy, when I have it sitting on my desk and move it around all of the data changes like it should, but then when I move it to the floor or vice versa then it will start giving me the LOW_FEATURES error
T_imu_wrt_vio (m) |Roll Pitch Yaw (deg)| state| error_code -0.02 -0.01 -0.07| 0.2 0.4 0.2| OKAY | -
Yeah it'll be unstable when its being moved around like that, it's meant to have the service start at the takeoff location and then track initial features on the floor/wall during takeoff. However, this does show that localization data is coming from the VIO service, so the problem is further down the line.
The two things to look at now are the vvpx4 config file at
cat /etc/modalai/voxl-vision-px4.confand make sure that the QGC stuff is set up properly, and thaten_vioandsend_vio_to_qgcare both set to true.If all of that looks good, then you should run
voxl-inspect-pose vvpx4_body_wrt_localto see if the voxl-vision-px4 service is getting the localization data peroperly. -
I believe that I have the voxl-vision-px4 setup correctly for QGC, here is the conf file:
yocto:/$ cat /etc/modalai/voxl-vision-px4.conf /** * VOXL Vision PX4 Configuration File * */ { "qgc_ip": "192.168.8.20", "en_localhost_mavlink_udp": true, "en_secondary_qgc": false, "secondary_qgc_ip": "192.168.1.214", "qgc_udp_port_number": 14550, "localhost_udp_port_number": 14551, "udp_mtu": 512, "en_vio": true, "en_voa": false, "en_send_vio_to_qgc": true, "en_send_voa_to_qgc": false, "en_set_clock_from_gps": true, "en_force_onboard_mav1_mode": true, "en_reset_px4_on_error": true, "qvio_auto_reset_quality": 0.00050000002374872565, "en_adsb": false, "adsb_uart_bus": 7, "adsb_uart_baudrate": 57600, "px4_uart_bus": 5, "px4_uart_baudrate": 921600, "offboard_mode": "figure_eight", "follow_tag_id": 0, "en_tag_fixed_frame": false, "fixed_frame_filter_len": 5, "en_transform_mavlink_pos_setpoints_from_fixed_frame": false }And here is the output for voxl-inspect-pose vvpx4_body_wrt_local:
timestamp(ms)| Position (m) | Roll Pitch Yaw (deg) | Velocity (m/s) | angular rate (deg/s) | 153336 | 0.00 -0.01 -0.09 | -0.6 11.0 -0.2 | -0.00 0.00 0.00 | -0.00 -0.03 0.01 -
Yeah that all looks fine, but there's no data in the local_position_ned or either of the odometry messages?
-
In QGC I only have the ODOMETRY data, but there is no local_position_ned tab if that is what you're referring to.
-
And what happens if you try to put it in position mode?
-
It just tells me "REJECT POSITION CONTROL"
-
I've asked some of our px4 experts what their thoughts are, can you share your px4 params file so we can see what's going on there since this seems to be a px4-side issue.
-
I couldn't figure out how to share the file through here, so I uploaded them to a drop box:
https://www.dropbox.com/s/7kxknquutoav00i/PX4_Param_Voxl.params?dl=0 -
We noticed that your EKF2 Aid mask is different from what we usually run, did you install the voxl px4 parameters file as here or did you create your own? Can you try to run with our default parameters file and see what happens?
-
I ran the parameters from the quickstart guide, I also ran the indoor_VIO helper and just changed the aid mask to fit was in the quickstart guide. I reverted it back to its original settings and the drone is still having the same problems.
-
So I've tried completely resetting the parameters on the drone back to factory and reloading all of the parameters again, but I am still getting invalid local position data.
Also as a small side note, should the tracking camera be inverted? (for example, I move an object from the top of the tracking camera and it shows up from the bottom on the feed)
-
Do you have a magnetometer connected? We have seen this issue when the px4 ekf doesn't initialize due to missing sensor
-
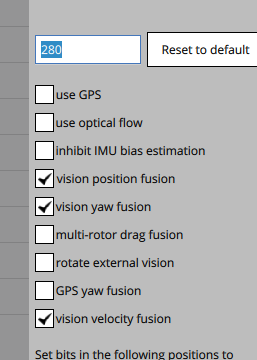
Hi Dillion--the reject control on mode switching is from having GPS activated (sounds like you don't have a 3D fix) considering your aid mask is 329. For vio-only flight, the parameters should be this:
If that does not solve it, you'll need to confirm in QGC's nuttx shell that vio message data is getting to PX4:
- In QGC, goto the [mavlink console] under [analysis tools], press [enter] to get a nuttx prompt
- type "uorb top vehicle_visual_odometry" [enter]
- confirm you're getting similar rates like this (key is the rate column)
TOPIC NAME INST #SUB RATE #Q SIZE vehicle_visual_odometry 0 1 30 1 256 vehicle_visual_odometry_aligned 0 0 15 1 256That will confirm vio data is being processed directly in PX4's EKF module. If not, we'll need to have you setup the video overlay to verify vio data itself (aka verify a mavlink issue).
-
Since we are attempting to preforming indoor flight using VIO I had disabled the SYS_HAS_MAG and the GPS_1 config like it says in the quickstart guide, so for this reason I didn't have the GPS and magnetometer plugged in. Once I plugged in the GPS and magnetometer the drone had valid position data and we were able to actually fly the drone.
The problem now is that when we flew it (which was outside in the sun which might have caused problems) the drone would take off in position mode very nice for about 5 seconds then it would start to freak out and flying more sporadically which is when we would land the drone. Is this due to the drone being flown outside is the sun or is this some type of calibration issue?
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login