VIO waypoint navigation
-
@Chad-Sweet
The latest release SDK 1.2 tells that now VIO waypoint navigation is now supported.
Could you tell us how we can test the above feature as the documentation doesn't make it clear. -
@Jetson-Nano Hi there, here's a tutorial on using this feature.
The video applies one of the vins_vio params-- based on if you are planning indoor or outdoor missions in QGC. The drone will automatically acquire heading from the internal compass. Note, the compass is not used for position estimation, just to acquire vehicle heading at power up. This is required in order to assign a global heading "at origin" (aka takeoff) since we are dealing with QGC's global Lat Lon system for mission planning. This allows a saved QGC-GPS mission be reused as long as a takeoff position is added....and loaded and executable under vio-only position estimation of course.
As an alternative, one may not use the above params, but instead use the option of manually entering in the heading of the vehicle. That is done in the takeoff item's heading field of a QGC mission. That is to allow manually heading change on the fly.
-
@Cliff-Wong
Heyy,
How do I do even set waypoints for Indoors with QGC? -
@Jetson-Nano If using QGC for mission planning, indoor missions are more of an approximation since openstreetmap displays no indoor spaces (e.g. approximating waypoints on the roofline of buildings). If there's a way to overlay an indoor floorplan/raster or add custom maps using a WMS server into QGC would be ideal. Then you can ingest a floor plan of a indoor space and perform precise waypoint planning. Note QGC mission planning provides distance info between waypoints, so one can construct an fairly accurate flight pattern (e.g. for navigating known aisleway & starting point for example).
To describe what's happening under the hood: we're using QGC's takeoff mission item as the local position origin for VIO, and its registered lat-lon is used as a global position offset (though you can manually type it in as well in QGC). From there, waypoints are executed in reference to that origin and true north (of the map). In the end, you're basically flying a pattern based on the take off point and true north. Hence, it doesn't matter where you fly on the map cause this feature is telling PX4 where the drone is located in global space (when running vio only)--and executes the same flight pattern [on the map] from the distances & heading.
Alternatives for indoor "mission planning": we do offer voxl-mapper (trajectory-style) as well as wps mode in voxl-vision-hub (waypoint-style), though both are offboard mode planners in local space and thus precise by setup, but being offboard-mode based, you do not get all the safety measures that PX4 mission mode provides (e.g. RTH, PL, Geofencing, Auto-mode, etc...).
-
@Cliff-Wong
Hey
I will try to input custom indoor maps with QGC.
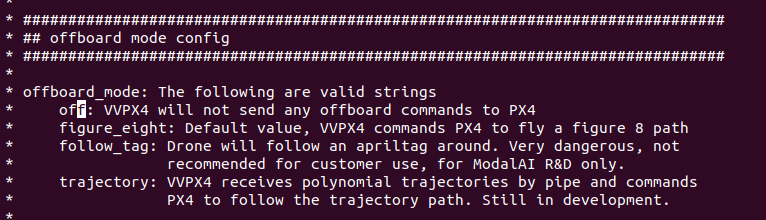
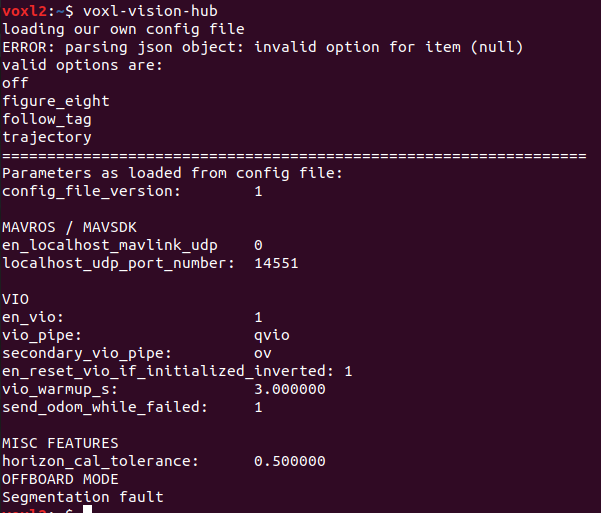
How can i configure voxl-vision-hub for waypoint-style navigation?
In the latest configration setups for SDK 1.2, only 4 configrations are there
-
@Cliff-Wong Hi,
I'm trying to implement the vio navigation without gps. i'm on sdk 1.3.2 with a starling 2.
When uploading the waypoint to the drone, the global position of the drone isn't reference to the take off point. in fact it doesn't appear at all on the map.
What can I do to fix that ?
Julien -
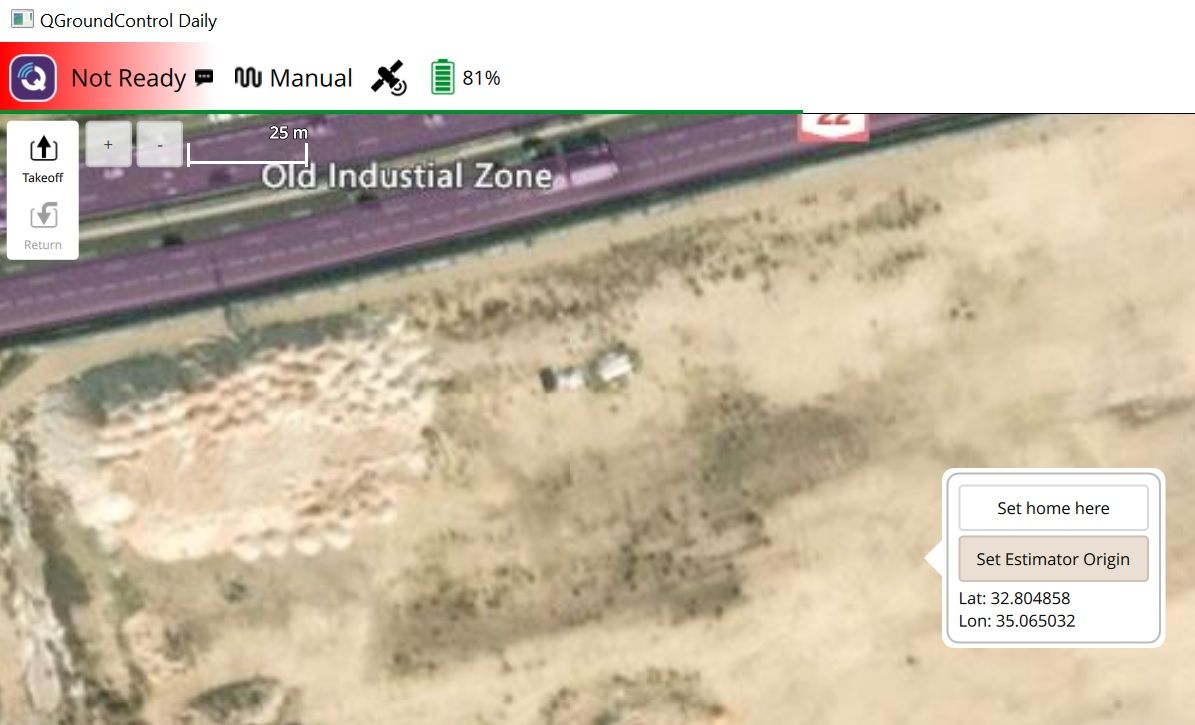
@Judoor-0
You can use QGroundControl v5 and later. Then once your drone coots and connected to the QGC, mouse click on the desirable position and select Set Estimator Origin option. This will be your [0,0,0] in local frame and [lat, lon, alt] in global