Sanity test for unusual use-case
-
Hi, I am designing a low latency accurate (mm or sub-mm) underwater tracking system.
I have a brute force solution working but I am at the stage of miniaturization and since each tracked object would need it's own tracking device the VOXL board is very attractive.
From my understanding the VOXL board might be more or less what I need, especially with all the customization options you have built.
I know ill need to work out coms and recalibrate the cameras for underwater optics and I would be using my own localization system that works well in openMV and openCV but frankly I'd rather not mess with the dead reckoning you have done here.
I have done a fair bit of digging around your docs and I don't think it should be impossible but I figured I would ask before spending the next little while coding myself into a pit of despair.
I know it is a weird use-case, I'm happy to answer any questions you have.
-
That sounds exciting! Tough to say exactly what will happen underwater. Do you have a block diagram of what you are trying to build?
VOXL is much more powerful than OpenMV. Check out voxl-tflite-server for TensorFlow lite usage if that is what you are using to track objects, we have OpenCV support.
-
@Chad-Sweet said in Sanity test for unusual use-case:
block diagram
Yep sure let me whip one up for you in the meantime here is a concept render for when we were working out the scale of the enclosure.

-
That sounds exciting! Tough to say exactly what will happen underwater. Do you have a block diagram of what you are trying to build?
VOXL is much more powerful than OpenMV. Check out voxl-tflite-server for TensorFlow lite usage if that is what you are using to track objects, we have OpenCV support.
@Chad-Sweet said in Sanity test for unusual use-case:
block diagram
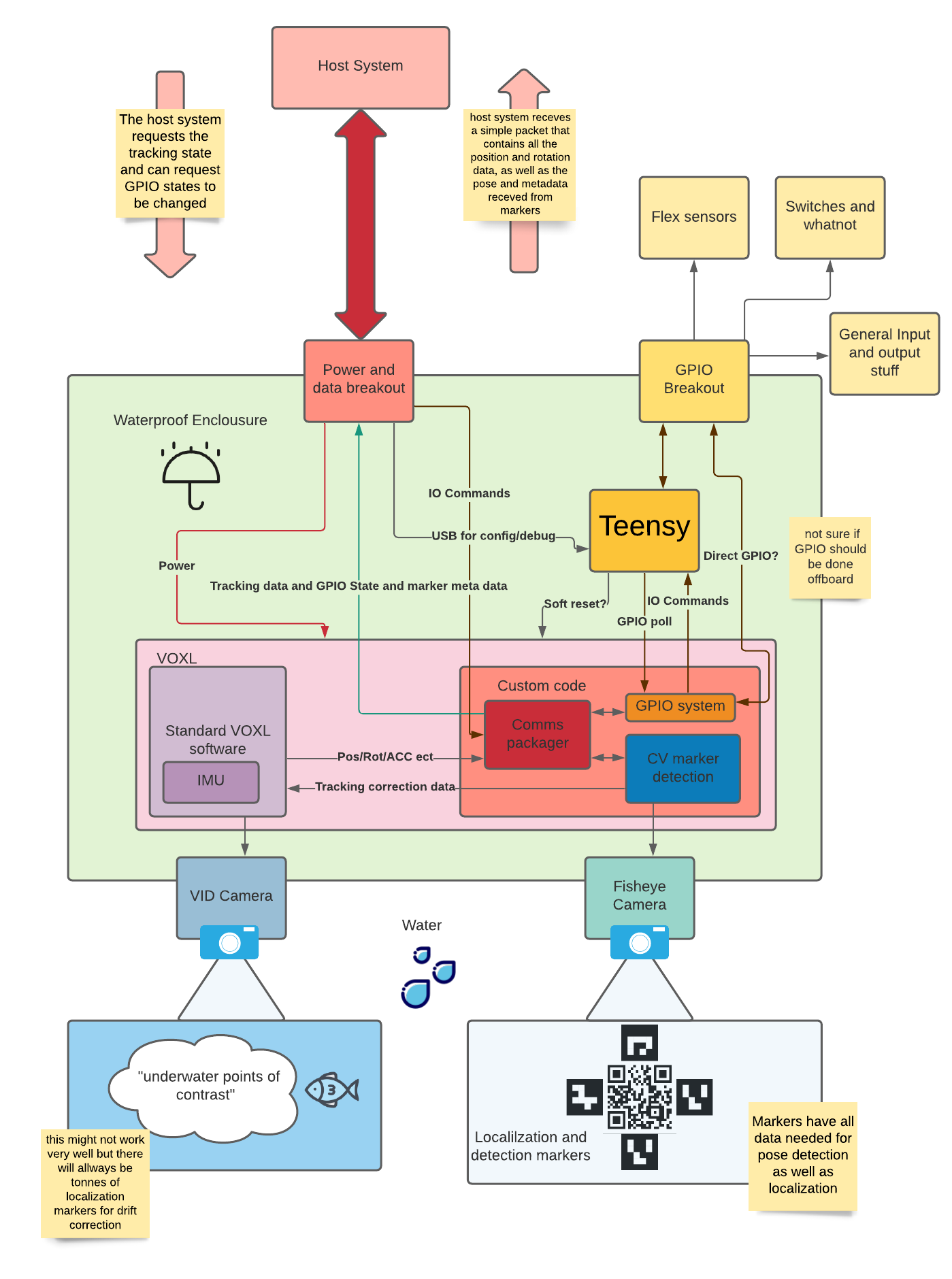
Ok here is a high level Block Diagram, teensy is there mostly because I am not super sure if the VOXL GPIO is going to be fast enough to do what I need, although that might be just because I misread the docs.
-
Nothing concerning stands out. Seems like you just need IMU, high-res and tracking cameras which are all available.
-
Yeah that's what I thought, but it seemed suspicious, too good to be true.
Everything I needed in a small package, nope there has to be a catch.Thanks for sanity testing this, I will jump back through the docs and order a few boards

-
-
Quick update, yeah it totally works
@Thomas-MacNamara Awesome! What a cool application!
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login