Cannot arm Starling in Position mode
-
I'm trying to arm Starling without GPS and have calibrated the VIO camera, but QGC just shows "MAV_CMD_COMPONENT_ARM_DISARM component temporarily rejected" without any other messages when I try to arm it in position mode. I didn't see any useful logs when I ran "voxl-px4 -d" too.
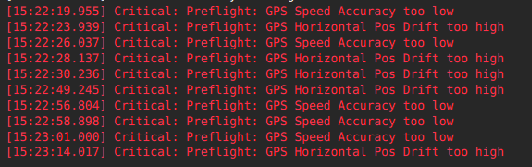
I tested that I can arm it in manual mode, although I have never successfully armed it in position mode before. Even when I tried with GPS, it kept giving me preflight failures (GPS speed accuracy, drift,etc.).
For this case without GPS, I'm running the following services
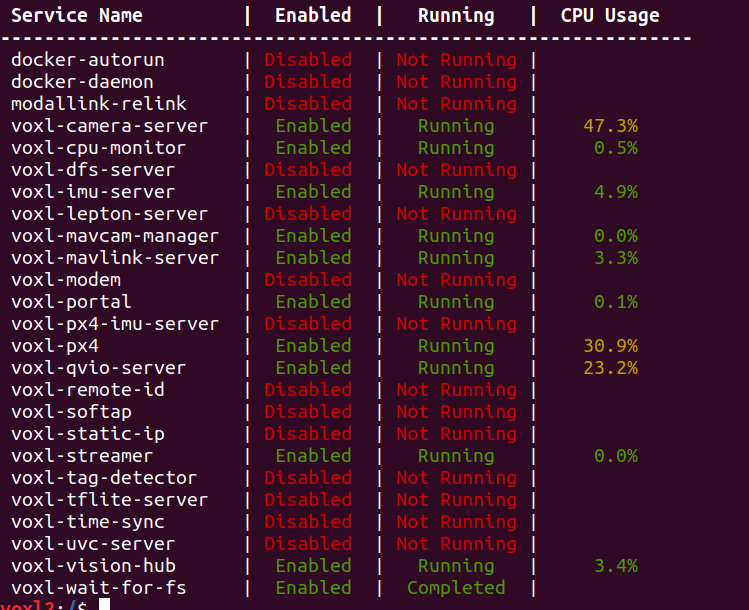
I can see that qvio is running

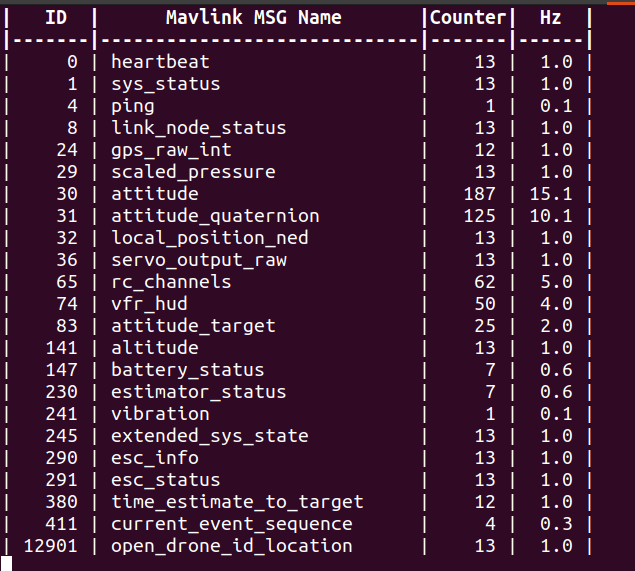
The mavlink messages are also being sent (mavlink_to_gcs)
So I'm not sure why it doesn't arm?
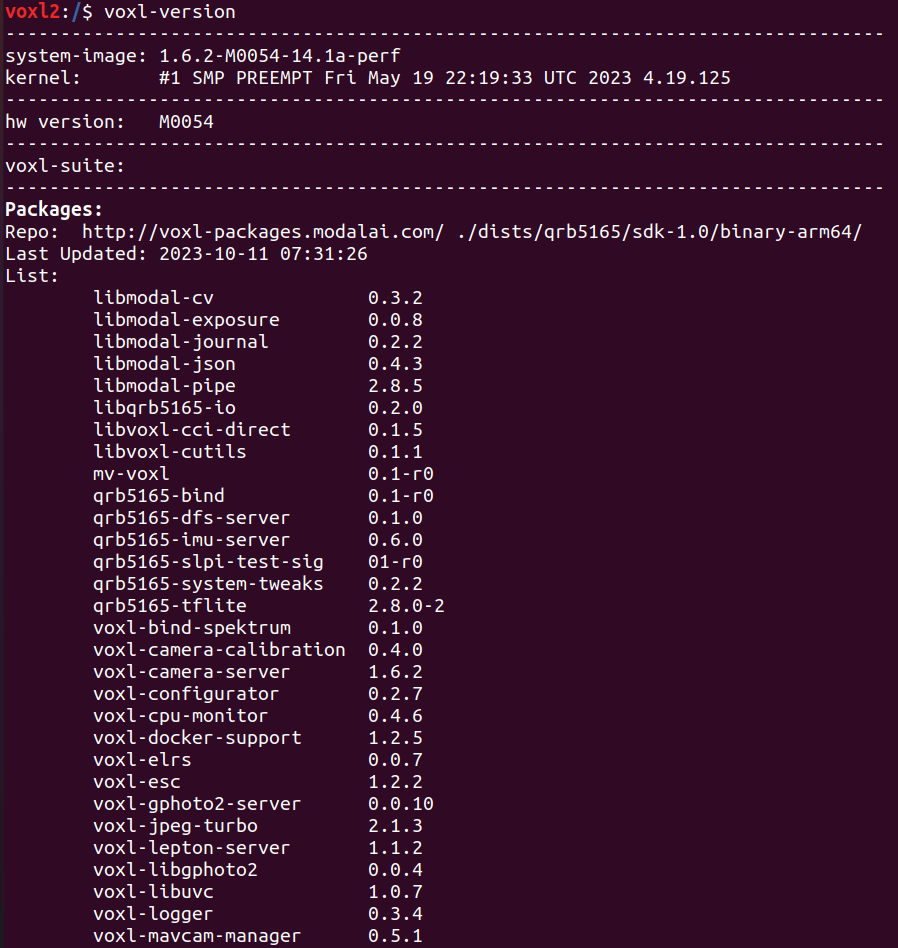
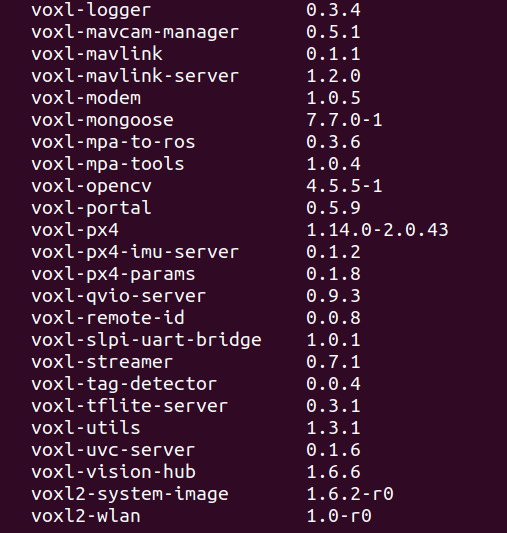
voxl-version: (I just realised the voxl-suite doesn't show 1.0.0? I had re-flashed VOXL SDK 1.0 on this previously)
-
I'm trying to arm Starling without GPS and have calibrated the VIO camera, but QGC just shows "MAV_CMD_COMPONENT_ARM_DISARM component temporarily rejected" without any other messages when I try to arm it in position mode. I didn't see any useful logs when I ran "voxl-px4 -d" too.
I tested that I can arm it in manual mode, although I have never successfully armed it in position mode before. Even when I tried with GPS, it kept giving me preflight failures (GPS speed accuracy, drift,etc.).
For this case without GPS, I'm running the following services
I can see that qvio is running
The mavlink messages are also being sent (mavlink_to_gcs)
So I'm not sure why it doesn't arm?
voxl-version: (I just realised the voxl-suite doesn't show 1.0.0? I had re-flashed VOXL SDK 1.0 on this previously)
@kerct did you remove the GPS? It is showing errors related to GPS
You can upload your PX4 log to logs.px4.io and it will likely tell you
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login