Update fw and params causing NO ESC detected
-
@Will , also can you please see if you can reproduce the issue without propellers using the following command:
./voxl-esc-spin.py --id 255 --power 30 --timeout 180(or try longer durations)
If this does not reproduce the issue,
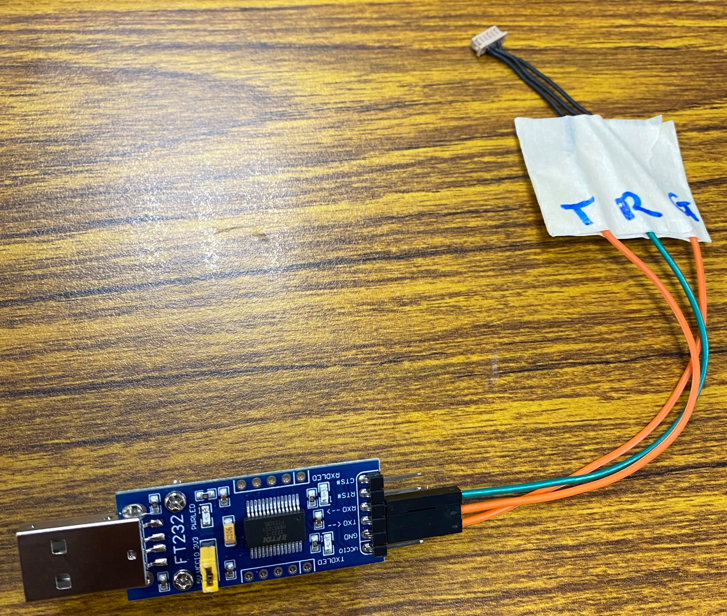
--power 50with propellers.. I am just trying to see if this is related to rpm control or power usage or something else..By the way, I noticed in your picture at the very top of this post that you have two wires soldered to the UART connector. Are you using those wires to connect to USB adapter (and also flight controller?). Please note that you should also connect GND between the ESC and the other device (USB adapter), otherwise the signal may not be grounded properly and can result in communication errors.
Additionally.. are you able to share the exact motor and propeller part number? Maybe i can test it. Thanks!
-
@Alex-Kushleyev , here are some updates :
I am curious if you increase the baud rate in your ESC params to 921600, whether this issue goes away.
Yes, after increasing baud rate to 921600 or more, the plot issue goes away.
does the same motor stop spinning ever time, or does the motor ID which fails changes from time to time?
No, it's not the same motor that consistently stops spinning; rather, it's each motor ID that experiences a failure
can you please inspect the motor cables (3 per motor) and make sure they are not damaged or cut, especially around / under zip ties that hold the cables to the arms (please check all the way from motors to the ESC). Also, if there are bullet connectors, make sure they are fully isolated and there is no exposed metal connector that could make contact with anything
Upon visual inspection, no damage or cuts are apparent. However, I will have our hardware guy to conduct a more in-depth diagnosis.
make sure that no camera flex cables are touching the ESC (sometimes camera flex cables can have exposed edge, so if it makes contact with ESC components, it can affect the performance or cause motor stall.
Yes, we have applied tape on camera flex to prevent electronic shorts.
By the way, I noticed in your picture at the very top of this post that you have two wires soldered to the UART connector. Are you using those wires to connect to USB adapter (and also flight controller?).
No, I had previously removed those two soldered wires when I obtained a compatible connector for connecting to the USB adapter.
are you able to share the exact motor and propeller part number?
I've conducted tests with two types of motors. The first is the Sunnysky x2212 (KV980), which you can find more information about here: https://sunnyskyusa.com/products/sunnysky-x2212-brushless-motors.

The second motor is the Dongxingwei D2216 (810KV), and additional details can be found at http://www.dongxingwei.com/detail_d2216.html.

Here is an image showing the propellers used, which are 9450 and 1045:

also can you please see if you can reproduce the issue without propellers using the following command:
No, I can't reproduce it without propellers. The following is where I use D2216 motor with 1045 propeller to reproduce the issue, thanks.
python voxl-esc-spin.py --id 255 --power 100 --timeout 180 --enable-plot 1
Detected Python version : 3.10.9 (main, Mar 1 2023, 18:23:06) [GCC 11.2.0]
Found voxl-esc tools bin version: 1.4
INFO: All COM ports:
/dev/ttyUSB0 : FT232R USB UART - FT232R USB UART
INFO: UART Port Candidates:
/dev/ttyUSB0
INFO: Scanning for ESC firmware: /dev/ttyUSB0, baud: 2000000
INFO: Scanning for ESC firmware: /dev/ttyUSB0, baud: 250000
INFO: Scanning for ESC firmware: /dev/ttyUSB0, baud: 921600
INFO: ESC(s) detected on port: /dev/ttyUSB0, baud rate: 921600
ID : 0
Board : version 34: ModalAi 4-in-1 ESC (M0117-1)
UID : 0x203034305743570C001A0038
Firmware : version 39, hash 3d7ee4eb
Bootloader : version 183, hash 25317f42ID : 1 Board : version 34: ModalAi 4-in-1 ESC (M0117-1) UID : 0x203034305743570C003D0050 Firmware : version 39, hash 3d7ee4eb Bootloader : version 183, hash 25317f42 ID : 2 Board : version 34: ModalAi 4-in-1 ESC (M0117-1) UID : 0x203034305743570C003D0054 Firmware : version 39, hash 3d7ee4eb Bootloader : version 183, hash 25317f42 ID : 3 Board : version 34: ModalAi 4-in-1 ESC (M0117-1) UID : 0x203034305743570C003D0056 Firmware : version 39, hash 3d7ee4eb Bootloader : version 183, hash 25317f42
WARNING:
This test requires motors to spin at high speeds with
propellers attached. Please ensure that appropriate
protective equipment is being worn at all times and
that the motor and propeller are adequately isolated
from all persons.For best results, please perform this test at the
nominal voltage for the battery used.Type "Yes" to continue: Yes
[0.000] (0) RPM: 0, PWR: 0, VOLTAGE: 0.000V, TEMPERATURE: 0.00C, CURRENT: 0.000A
[0.000] (1) RPM: 0, PWR: 0, VOLTAGE: 0.000V, TEMPERATURE: 0.00C, CURRENT: 0.000A
[0.000] (2) RPM: 0, PWR: 0, VOLTAGE: 0.000V, TEMPERATURE: 0.00C, CURRENT: 0.000A
[0.000] (3) RPM: 0, PWR: 0, VOLTAGE: 0.000V, TEMPERATURE: 0.00C, CURRENT: 0.000A
[0.011] (0) RPM: 0, PWR: 0, VOLTAGE: 0.000V, TEMPERATURE: 0.00C, CURRENT: 0.000A
[0.011] (1) RPM: 0, PWR: 0, VOLTAGE: 0.000V, TEMPERATURE: 0.00C, CURRENT: 0.000A
[0.011] (2) RPM: 0, PWR: 0, VOLTAGE: 0.000V, TEMPERATURE: 0.00C, CURRENT: 0.000A
[0.011] (3) RPM: 0, PWR: 0, VOLTAGE: 0.000V, TEMPERATURE: 0.00C, CURRENT: 0.000A
[0.021] (0) RPM: 0, PWR: 0, VOLTAGE: 0.000V, TEMPERATURE: 0.00C, CURRENT: 0.000A
[0.021] (1) RPM: 0, PWR: 0, VOLTAGE: 12.681V, TEMPERATURE: 34.95C, CURRENT: -0.008A
[0.021] (2) RPM: 0, PWR: 0, VOLTAGE: 0.000V, TEMPERATURE: 0.00C, CURRENT: 0.000A
[0.021] (3) RPM: 0, PWR: 0, VOLTAGE: 0.000V, TEMPERATURE: 0.00C, CURRENT: 0.000A
[0.031] (0) RPM: 0, PWR: 0, VOLTAGE: 0.000V, TEMPERATURE: 0.00C, CURRENT: 0.000A
[0.031] (1) RPM: 0, PWR: 0, VOLTAGE: 12.681V, TEMPERATURE: 34.95C, CURRENT: -0.008A
[0.031] (2) RPM: 9, PWR: 0, VOLTAGE: 12.672V, TEMPERATURE: 34.39C, CURRENT: -0.056A
[0.031] (3) RPM: 0, PWR: 0, VOLTAGE: 0.000V, TEMPERATURE: 0.00C, CURRENT: 0.000A
...
[179.990] (0) RPM: 865, PWR: 0, VOLTAGE: 11.095V, TEMPERATURE: 46.73C, CURRENT: 0.520A
[179.990] (1) RPM: 875, PWR: 0, VOLTAGE: 11.096V, TEMPERATURE: 45.66C, CURRENT: 0.456A
[179.990] (2) RPM: 6658, PWR: 100, VOLTAGE: 11.094V, TEMPERATURE: 46.91C, CURRENT: 8.672A
[179.990] (3) RPM: 6686, PWR: 100, VOLTAGE: 11.091V, TEMPERATURE: 44.31C, CURRENT: 9.088A
Finished!
[1701932726.226422] TX=18008, RX=18005 packets, RX CRC ERRORS=0
Average RPMs: 733.55 721.26 6645.88 6680.47
Average RPM deviation between ESCs : 5959.22
False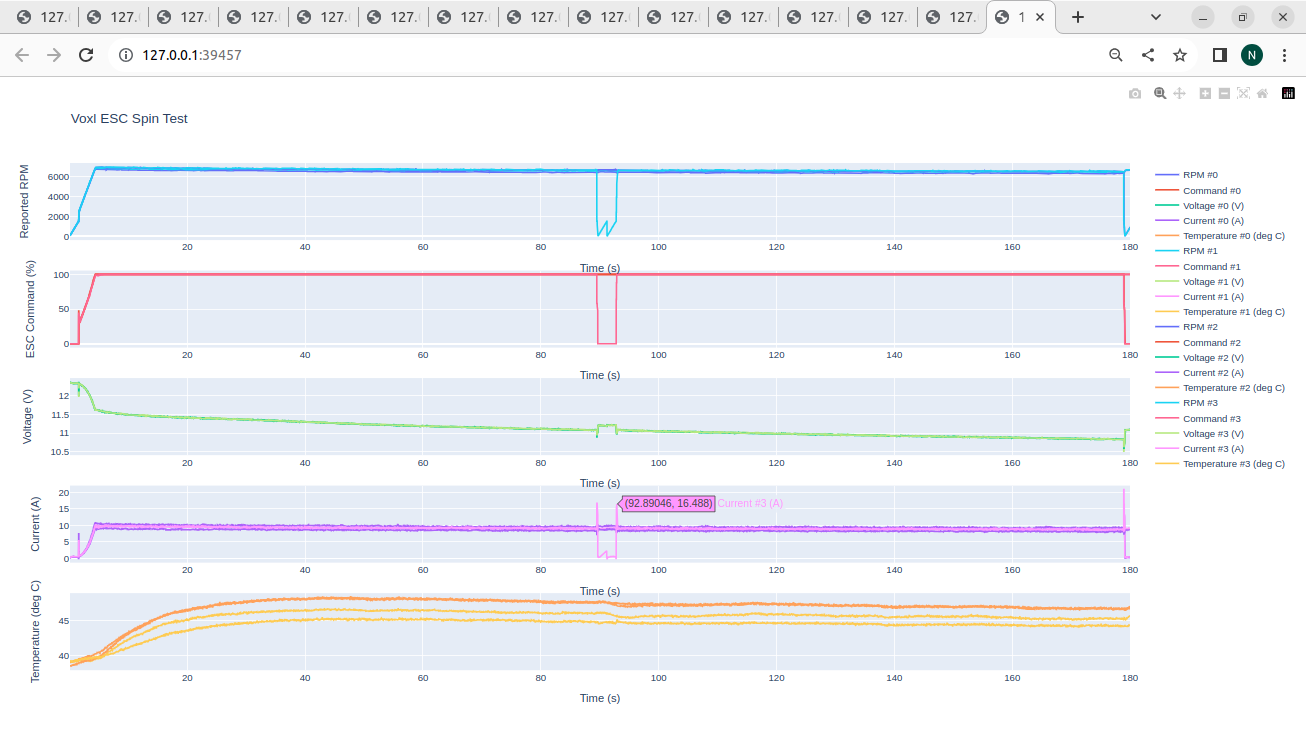
-
@Will thank you for providing valuable information.
Can you please confirm (again) that after changing baud rate to higher (form 250k to 921600 or higher, you were not able to reproduce the issue even a single time? **correction, I see now that only the plot issue is solved by increasing the baud rate, but the motor issue remains, correct?
Also, i have noticed that in your last plot, it happened twice, with offset of about 90 seconds - have you noticed this before?
I am performing tests to try to reproduce the issue..
Alex
-
@Will , i still have not been able to reproduce the issue but I may have found a very rare condition that may be happening in your case. I am going to share a firmware update soon and ask you to test it if possible. thank you
Alex
-
@Alex-Kushleyev , Sure, I'll conduct testing once the updated firmware is available. By the way, where I can download the source code to build the ESC firmware?
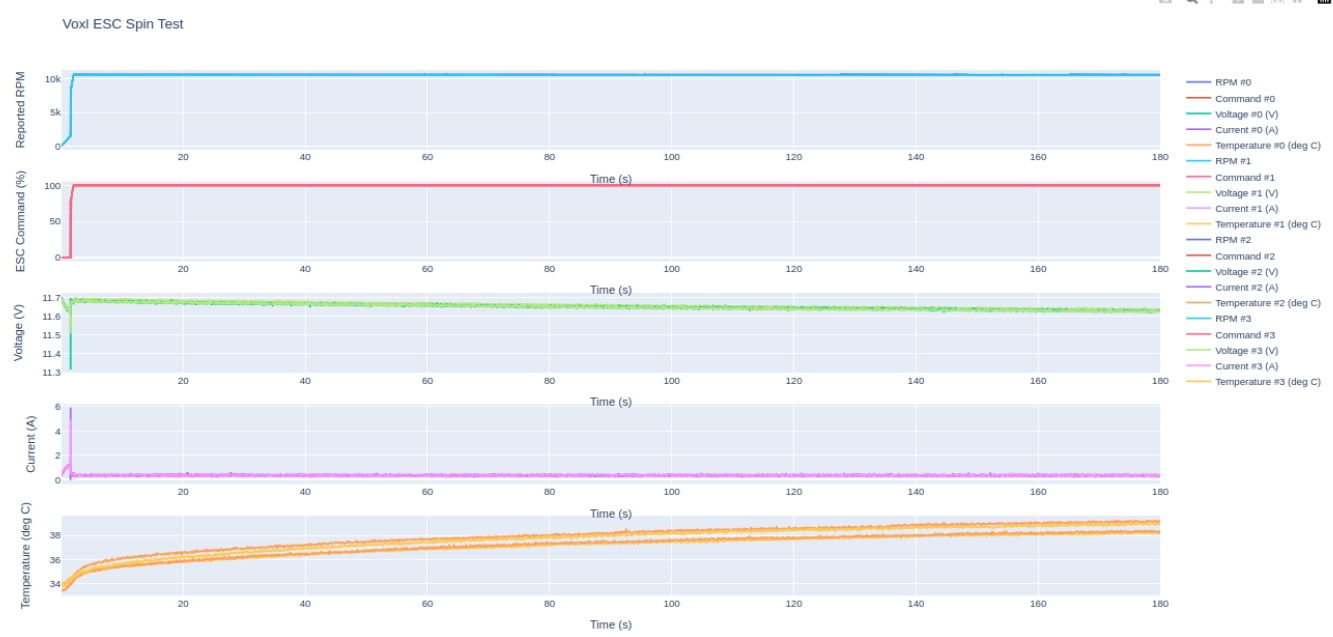
Here's a test plot without the propeller for your reference, no issues were identified. Thank you.
-
@Will , the source code for the ESC firmware is not available, it is a closed-source project.
I have made a small change that will hopefully fix your issue. The reason why I say "hopefully" is because i am not able to reproduce your exact issue, but i was able to reproduce a small glitch, which is now fixed in the test firmware. In my case the motor did not stop during the glitch, but it had a jerk. Perhaps with different test conditions, the result could be different, like in your case, when the motor would stop completely.
The test firmware is located here : https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-esc/-/tree/desync-bug-fix/voxl-esc-tools/firmware/test ( you can find the correct one for your M0117-1 board). The firmware is based off V39_RC6, which is what you have been using before.
Please try it using the same tests that you have been running and if you are not able to reproduce the issue on the bench, you should test in flight as well.
In ether case (whether the issue is fixed or not), please let me know, as I am actively working on trying to resolve it.
Thank you!!
Alex
-
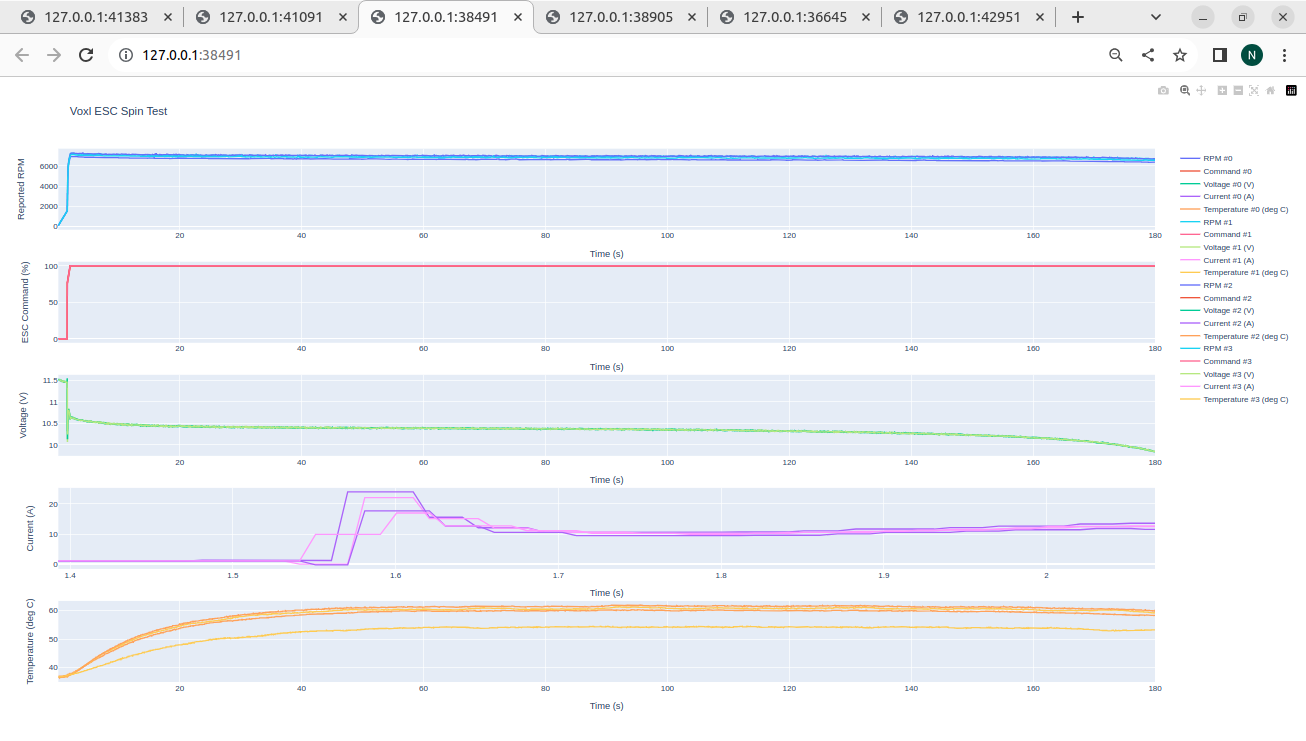
@Alex-Kushleyev , I've conducted tests on firmware version modalai_esc_firmware_m0117_1_v0_39_bugfix1_14e444b3.bin, and I didn't observe any issues with the stop spinning function. However, there seems to be an unusual burst of current at the beginning. Could you please assist in investigating this matter? Thank you :
- Test round 1 :
python voxl-esc-spin.py --id 255 --power 100 --timeout 180 --enable-plot 1
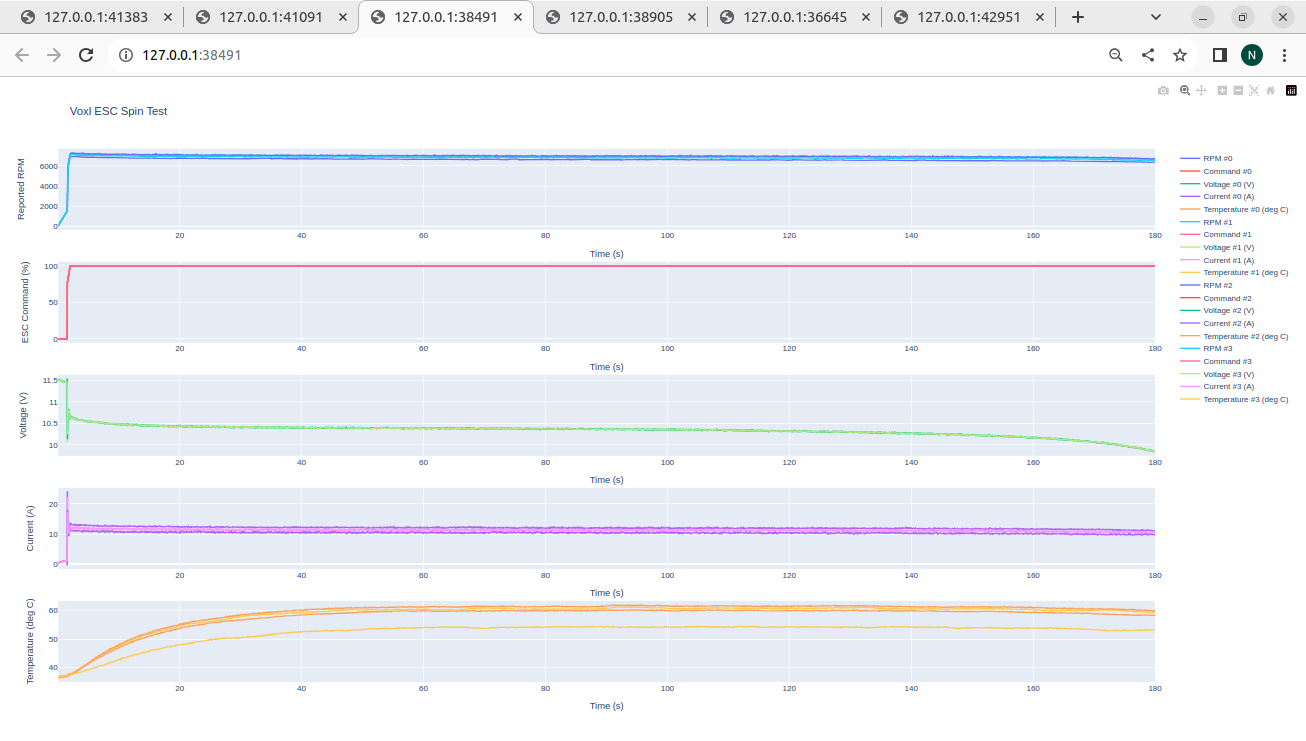
Zoom in the current plot:
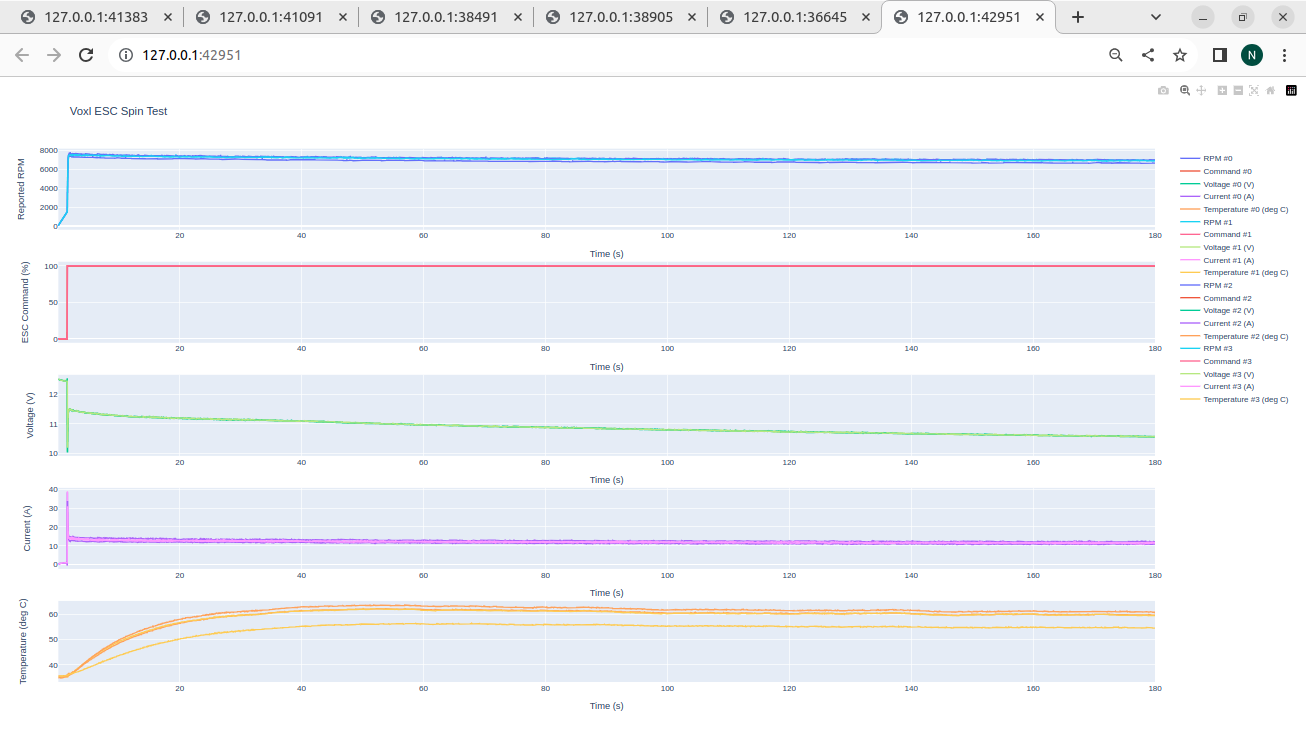
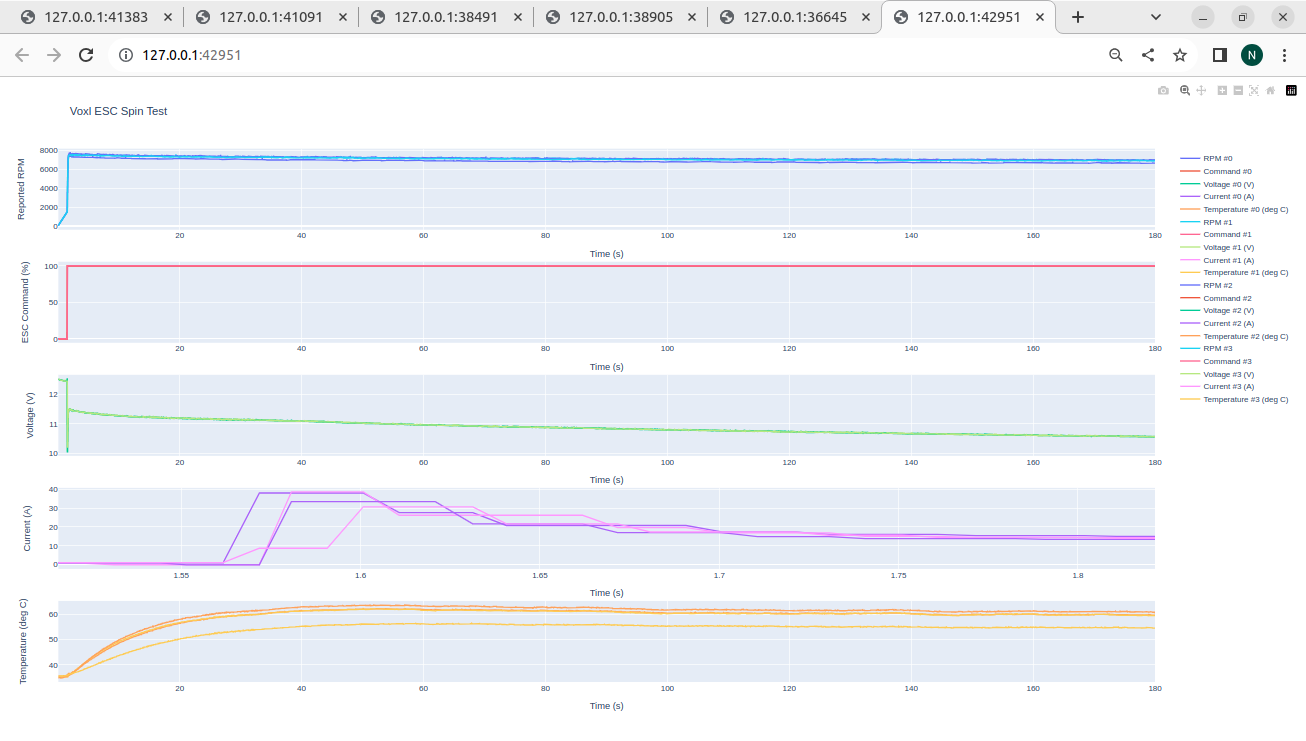
- Test round 2 :
python voxl-esc-spin.py --id 255 --power 100 --ramp-time 2 --timeout 180 --enable-plot 1
Zoom in the current plot:
- Test round 1 :
-
@Will , Thank you for testing the firmware update. The current spike at the beginning looks normal - this is due to motor quickly accelerating after the initial spin-up stage. The ramp time of your test is 2 seconds, but the initial spin-up time is about 1.5 seconds (it is in ESC params). The test script does not account for the spin-up time.. So, after 1.5 seconds of spin-up, the commanded power will jump to like 75% and then will have about 0.5 seconds to go to 100%, which will draw a lot of current until the final (steady-state) speed is reached. If you would like, you can set the ramp time to 5 seconds and it will be much smoother if you prefer. Does that make sense to you?
I am curious, how many successful 180 second tests have you done with the bugfix firmware? Also, before the firmware update, did every test result in a failure, or was it rare?
By the way, a small tip - if you use latest
voxl-esctools from dev branch, the plots now have the x-axis synchronized, so if you zoom in on one plot, the other plots also zoom to the same x range, so it is easier to look at the plots.Alex
-
@Alex-Kushleyev , Using 180-second tests, the x2212 motor consistently failed under full power. In contrast, the d2216 motor passed once with a 9450 propeller, but no attempt was made with a 1045 propeller. Today, I conducted a test pairing the x2212 motor with a 1045 propeller, which I consider the most challenging condition. Surprisingly, it passed twice consecutively, instilling confidence in me. I plan to proceed with the field test using this fw version, thanks for your help.
-
@Will , this is great to hear! Thank you for your patience as we are resolving this issue. It does sound like you are ready for flight testing.
Meanwhile we will continue testing of the fix and will release an official firmware update to resolve the issue soon (probably this week). However, you don't need to wait for it, the test firmware you already have should be sufficient.
If you run into any other ESC-related issues, please let us know!
Alex