OV9782 VIO jumps but does not reset
-
Hi there!
We are using the OV9782 with a VOXL2 on sdk1.0 to pass VIO along to an external autopilot. The system is performing well, but when I inspect the logs on the autopilot side I see that the estimate tends to jump sometimes. The qvio pipe does not return resets, lack of features or error codes. The logs on the autopilot sider show this:
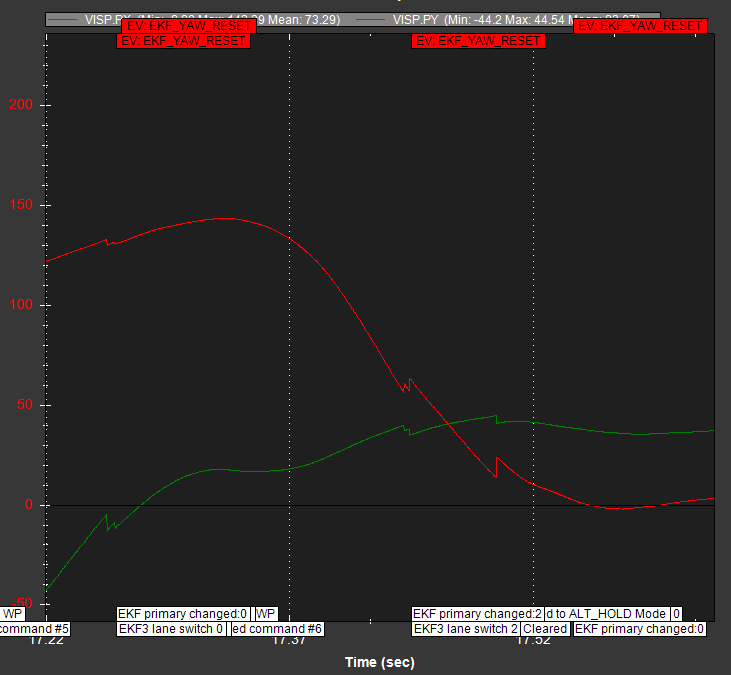
Those small jumps are causing a lane switch in the EKF. From time to time it will cause it to throw a failsafe.
Similar flights with the OV7251 camera do not show the same problem. Although we do get hard resets in that case.
Is the higher resolution camera making the system drop frames or messing with the timing? Should the parameters in the qvio-server change for this camera? Any help/pointers/ideas would be much appreciated.
Cheers!
-
Can you screen capture the qvio-overlay? That might show some clues
voxl-logger --preset_odometrymight be useful as well -
Can you screen capture the qvio-overlay? That might show some clues
voxl-logger --preset_odometrymight be useful as well@Moderator will try to on our next flight. Do you have an easy way to trigger a capture when certain conditions are met? It is hard to correlate hundred of images to the autopilot logs to find these instances. We are working on streaming the qvio-overlay as an RTSP stream down to the GCS. That might be easier.
Unrelated question. Can the VIO algorithm use the colored images coming from the camera? If yes, is there an advantage at all?
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login