Obstacle avoidance / Collision prevention is disable in QGroundControl
-
Hi guys,
I'm testing flight deck and I'm trying to test object avoidance and collision prevention.
as you know flight deck sensors, I have hi-resolution camera, stereo vision and tracking camera with default configuration.
this is my voxl-vision-px4.conf
{
"qgc_ip": "192.168.219.182",
"en_localhost_mavlink_udp": true,
"en_secondary_qgc": false,
"secondary_qgc_ip": "192.168.1.214",
"qgc_udp_port_number": 14550,
"localhost_udp_port_number": 14551,
"en_vio": true,
"en_voa": true,
"en_send_vio_to_qgc": false,
"en_send_voa_to_qgc": false,
"en_adsb": false,
"adsb_uart_bus": 7,
"adsb_uart_baudrate": 57600,
"px4_uart_bus": 5,
"px4_uart_baudrate": 921600,
"offboard_mode": "figure_eight","R_imu_to_body": [[0, 1, 0], [1, 0, 0], [0, 0, -1]], "T_imu_wrt_body": [0.068, -0.015, -0.008], "height_body_above_ground_m": 0.05, "T_stereo_wrt_body": [0.10, -0.04, 0.0], "land_on_tag_id": 0, "follow_tag_id": 0, "en_apriltag_fixed_frame": false, "fixed_apriltags": [{ "tag_id": 0, "R_tag_to_fixed": [[0, -1, 0], [1, 0, 0], [0, 0, 1]], "T_tag_wrt_fixed": [0, 0, 0] }], "en_transform_mavlink_pos_setpoints_from_fixed_frame": true, "en_fixed_frame_pipe": false, "fixed_frame_filter_len": 5}
I already calibrated my stereo vision camera and I found calibration result as below.
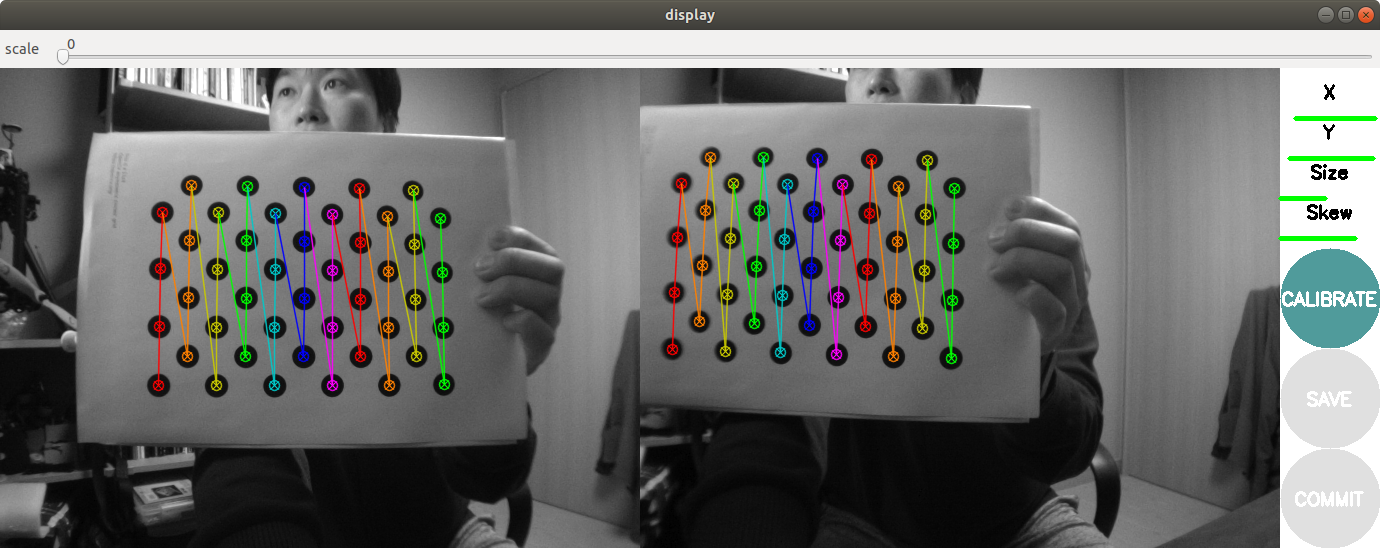
before calibration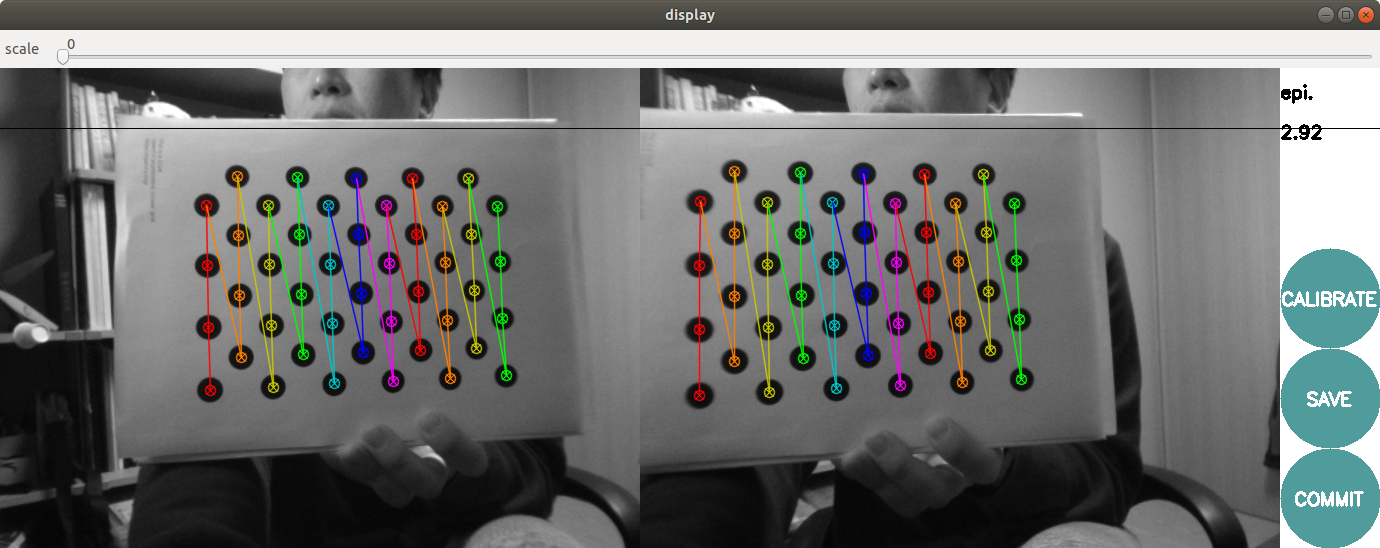
after calibrationyocto:/# ls /home/root/.ros/camera_info/
left.yaml right.yaml tracking.yamlyocto:/# ls /etc/snav/
calibration.stereo.xmlbut, when I try to debug stereo mode with voxl-vision-px4, it stop on this.
I think it's not normal. It sound display cloud point on terminal.
am I right?{
yocto:/# voxl-vision-px4 -s
loading our own config fileParameters as loaded from config file:
qgc_ip: 192.168.219.182
en_localhost_mavlink_udp 1
en_secondary_qgc: 0
secondary_qgc_ip: 192.168.1.214
qgc_udp_port_number: 14550
localhost_udp_port_number: 14551
en_vio: 1
en_voa: 1
en_send_vio_to_qgc: 0
en_send_voa_to_qgc: 0
en_adsb: 0
adsb_uart_bus: 7
adsb_uart_baudrate: 57600
px4_uart_bus: 5
px4_uart_baudrate: 921600
offboard_mode: figure_eight
follow_tag_id: 0
en_apriltag_fixed_frame: 0
fixed_frame_filter_len: 5
en_transform_mavlink_pos_setpoints_from_fixed_frame:1loading extrinsics and apriltag external config files
#0:
tag id: 0
name: default_name
location: fixed
size_m: 0.400
T_tag_wrt_fixed: 0.0 0.0 0.0
R_tag_to_fixed: 0.0 -1.0 0.0
1.0 0.0 0.0
0.0 0.0 1.0
#1:
tag id: 1
name: default_name
location: fixed
size_m: 0.400
T_tag_wrt_fixed: 0.0 0.0 0.0
R_tag_to_fixed: 0.0 -1.0 0.0
1.0 0.0 0.0
0.0 0.0 1.0
loaded in 2 fixed apriltags
#0:
parent: imu1
child: imu0
T_child_wrt_parent: -0.048 0.037 0.002
RPY_parent_to_child: 0.0 0.0 0.0
R_child_to_parent: 1.000 -0.000 0.000
0.000 1.000 -0.000
0.000 0.000 1.000
#1:
parent: imu0
child: tracking
T_child_wrt_parent: 0.065 -0.014 0.013
RPY_parent_to_child: 0.0 45.0 90.0
R_child_to_parent: 0.000 -0.707 0.707
1.000 0.000 -0.000
-0.000 0.707 0.707
#2:
parent: imu1
child: tracking
T_child_wrt_parent: 0.017 0.015 0.013
RPY_parent_to_child: 0.0 45.0 90.0
R_child_to_parent: 0.000 -0.707 0.707
1.000 0.000 -0.000
-0.000 0.707 0.707
#3:
parent: body
child: imu0
T_child_wrt_parent: 0.020 0.014 -0.008
RPY_parent_to_child: 0.0 0.0 0.0
R_child_to_parent: 1.000 -0.000 0.000
0.000 1.000 -0.000
0.000 0.000 1.000
#4:
parent: body
child: imu1
T_child_wrt_parent: 0.068 -0.015 -0.008
RPY_parent_to_child: 0.0 0.0 0.0
R_child_to_parent: 1.000 -0.000 0.000
0.000 1.000 -0.000
0.000 0.000 1.000
#5:
parent: body
child: stereo_l
T_child_wrt_parent: 0.100 -0.040 0.000
RPY_parent_to_child: 0.0 90.0 90.0
R_child_to_parent: 0.000 -0.000 1.000
1.000 0.000 -0.000
-0.000 1.000 0.000
#6:
parent: body
child: tof
T_child_wrt_parent: 0.100 0.000 0.000
RPY_parent_to_child: 0.0 90.0 90.0
R_child_to_parent: 0.000 -0.000 1.000
1.000 0.000 -0.000
-0.000 1.000 0.000
#7:
parent: body
child: ground
T_child_wrt_parent: 0.000 0.000 0.100
RPY_parent_to_child: 0.0 0.0 0.0
R_child_to_parent: 1.000 -0.000 0.000
0.000 1.000 -0.000
0.000 0.000 1.000
starting geometry module
starting uart mavlink
Successfully opened mavparser
starting udp mavlink
Adding manual QGC IP address to udp connection list: 192.168.219.182
Added new UDP connection to 192.168.219.182
starting px4 shell
Detected PX4 Mavlink SYSID 1
starting fixed pose input
starting vio manager
starting apriltag manager
starting voa manager
starting offboard figure eight
Init complete, entering main loop
Connected to voxl-qvio-server
done updating transforms to use imu: imu0
PX4 Connected over UART with sysid 1 <------ stop on this point for my stereo debug mode}
also, when I connect to QGroundControl, I cannot satisfy pre-arm check because of avoidance/collision prevention Disabled
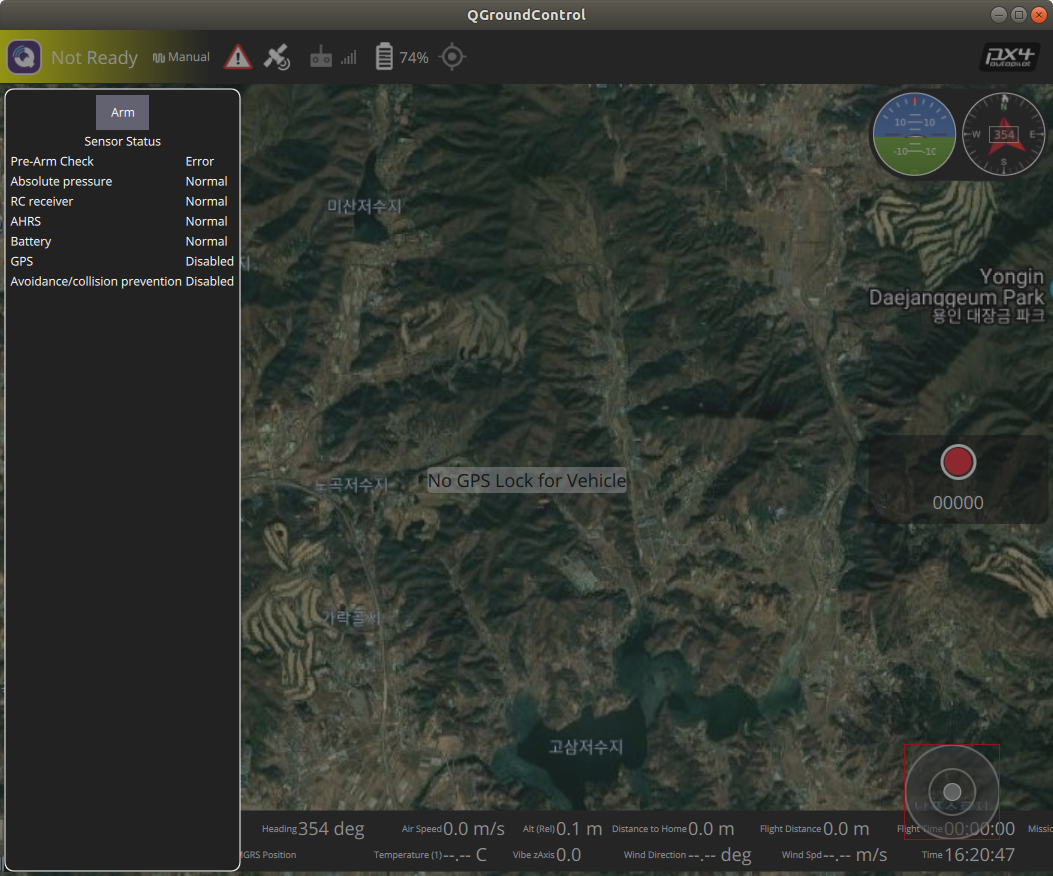
also, I alredy checked all the relative parameters as like this.
https://docs.modalai.com/voxl-vision-px4-collision-prevention/Could you please give me advise to test obstacle avoidance?
Thanks,
-
If you start voxl-vision-px4 manually, you can run 'voxl-vision-px4 --help' and see the following option available
-s, --debug_stereo print detected stereo obstacles as linescan points
-
@Chad-Sweet as you can see above script, I already run manual option -s.
But, I cannot see any obstacle cloud point. Just stop on processing.
Please look at above message carefully.
Thanks,
-
@Chad-Sweet Hi Chad,
Could you please let me know the example of normal operation with -s option?
Thanks,
-
I'm afraid to say the VOA feature has not yet been ported forward to our new software architecture (voxl-suite v0.3.4), but it still works in the legacy software (voxl-suite 0.2.0). We are a few weeks away from finishing the new version of VOA and adding it back in, at which point we will release another voxl-suite version. Until then you can go back to voxl-suite 0.2.0, sorry for the inconvenience! We are in a bit of a transition period as we rewrite all of our legacy software in the new architecture.
Best Regards,
James -
@James-Strawson got it.
My test s/w version is volx-vision-px4 0.3.4 and has a same problem, am I right?
Okay, I’ll proceed test VOA using 0.2.0 version before releasing new version s/w.
Can I know release date for new version?
Thanks,