Mavlink Mode on FC-V1
-
Hey there,
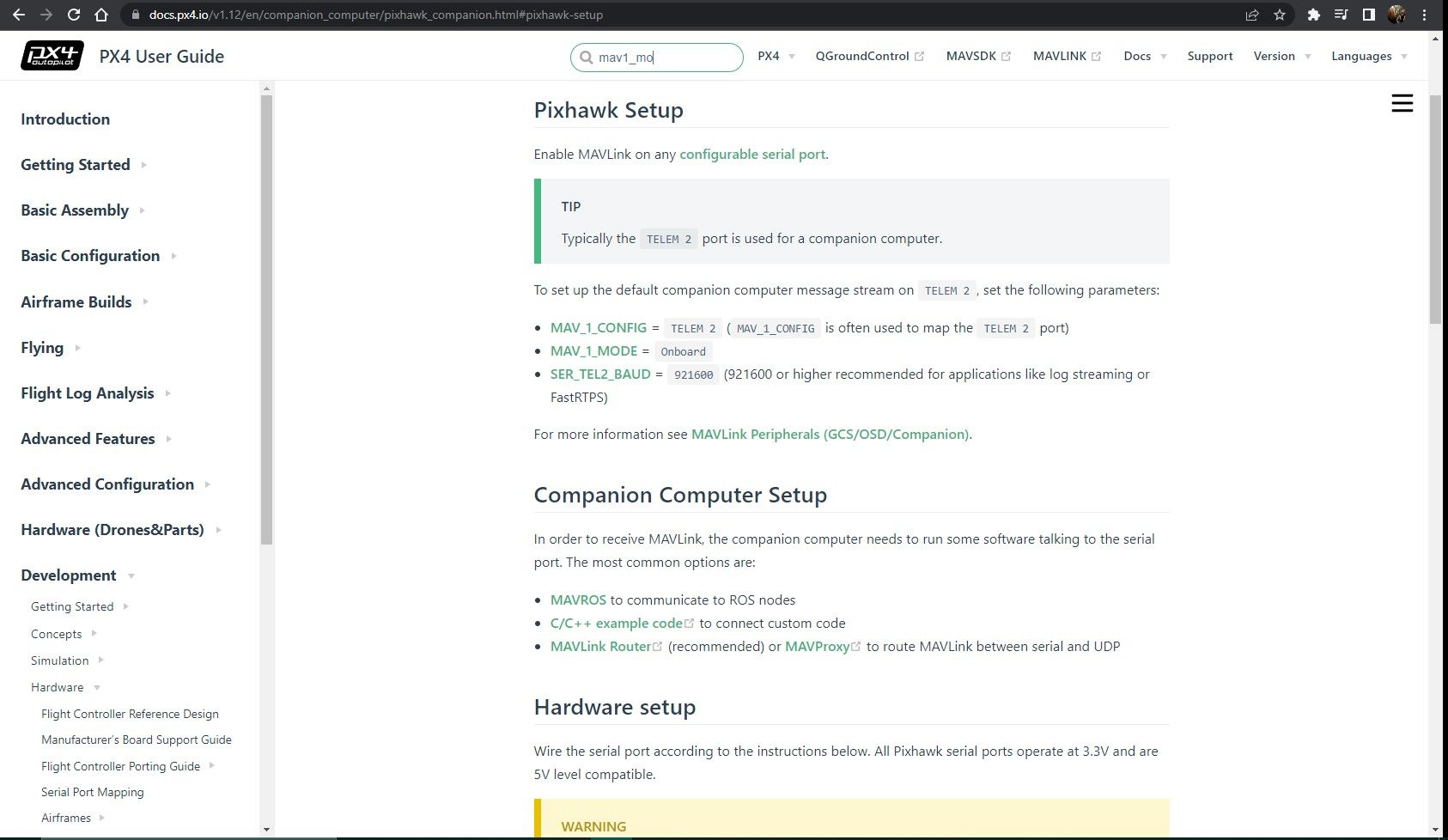
I recently stumbled upon some unclear and conflicting documentation and hope to get some insight from you guys:This is about the PX4 parameter that sets the mavlink mode to talk to VOXL on UART2 with the one-PCB solution:
I was used to it having to be set to "onboard" (value "2") as is covered in the general PX4'documentation-
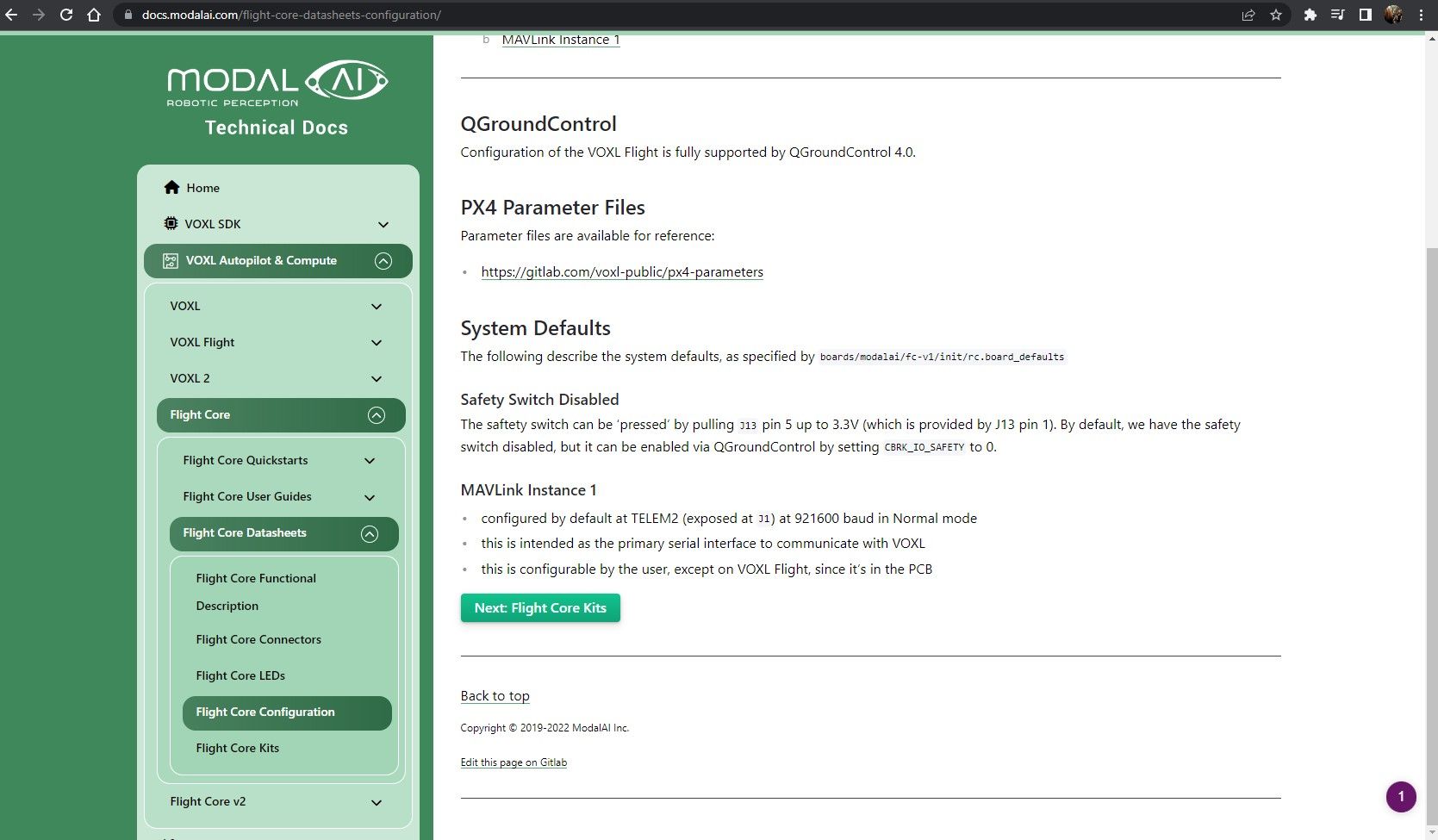
and used to be in your (ModalAI)'s documentation which recently got updated and now says "0" (Normal) as the mode for both Flight Core and VOXL Flight:
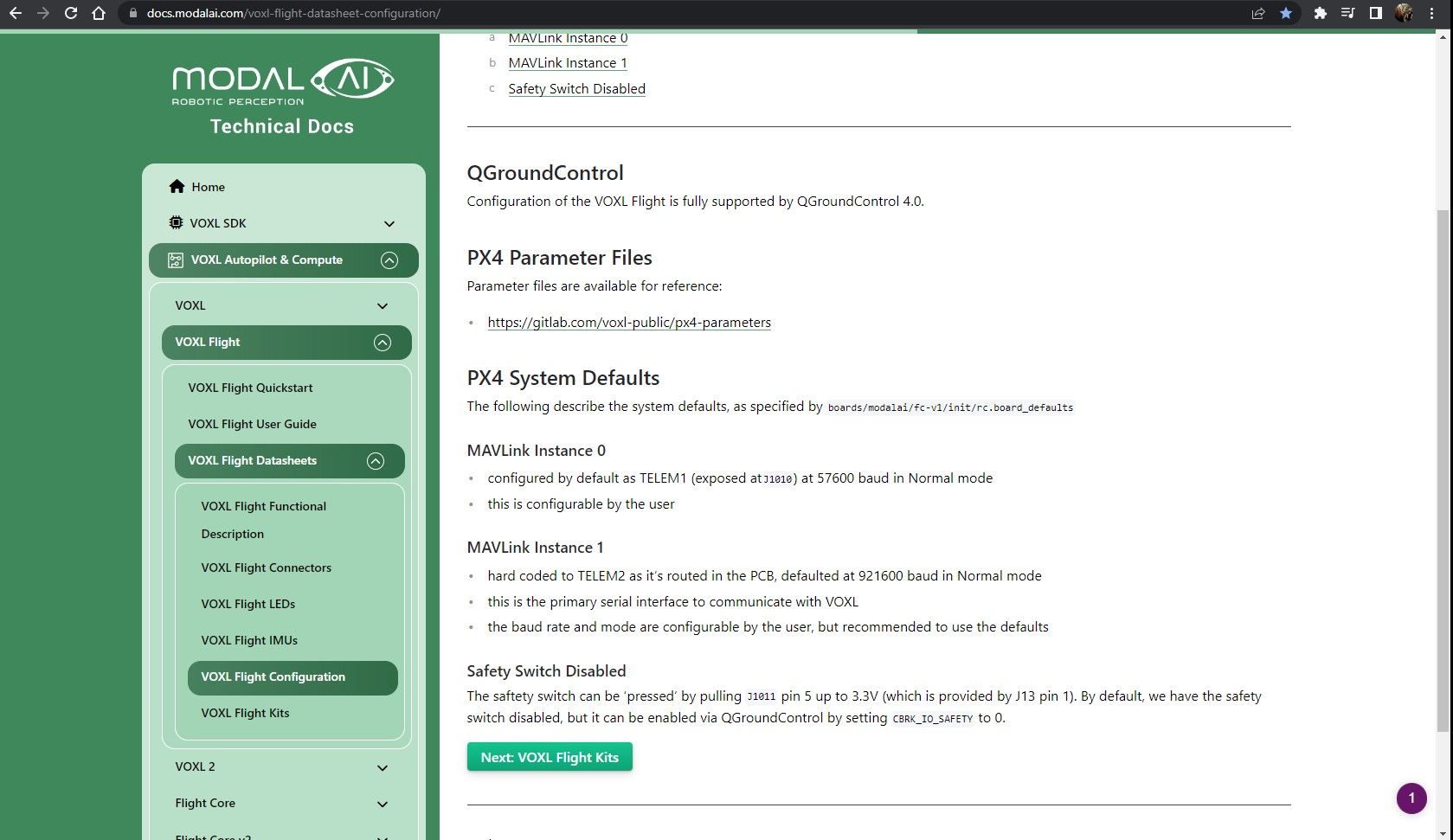
and
while the source code still includes "2" (Onboard) as the default parameter-
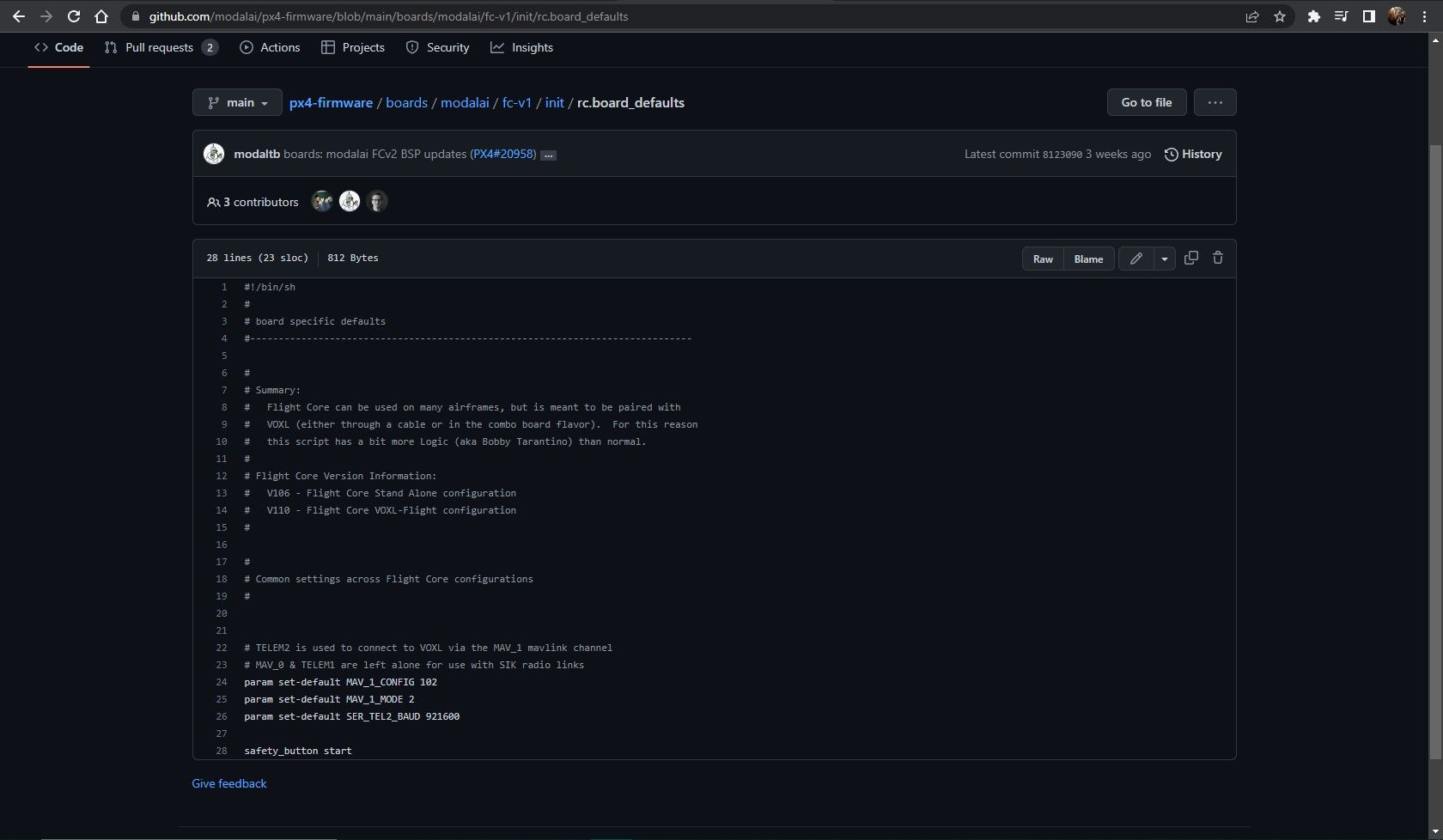
the picture shows your own repository but it's the same with all other branches as well.
Funny thing is - sometimes I can set this parameter afterwards and sometimes it just resets immediately. Not sure yet if that's dependant on the IMUs present or maybe the airframe selection or some other parameter...However,
I would like to know which is the desired Mavlink mode to set in PX4 for the UART that I want it to talk to the VOXL?
thanks and cheers. -
Hey,
just to give a little update here:
I found out how to set the "force mavlink mode" variable in the voxl-vision-hub.conf which was forcing the parameter back in PX4, and simultaneously set it to "Normal" in PX4.
So far I don't see any downsides from using MAV_1_MODE=0 (normal).
I'm only making use of voxl-mavlink-server and voxl-vision-hub for the time being, basically to use VOXL's connectivity to send MAV commands to the PX4.
Do you think using "normal" will have any downsides?
The inconsistency between your documentation and the .conf and PX4 firmware files still exists though, so I'd really like to get some more insight on this.
Thanks and a great weekend to everyone.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login