ESC feedback
-
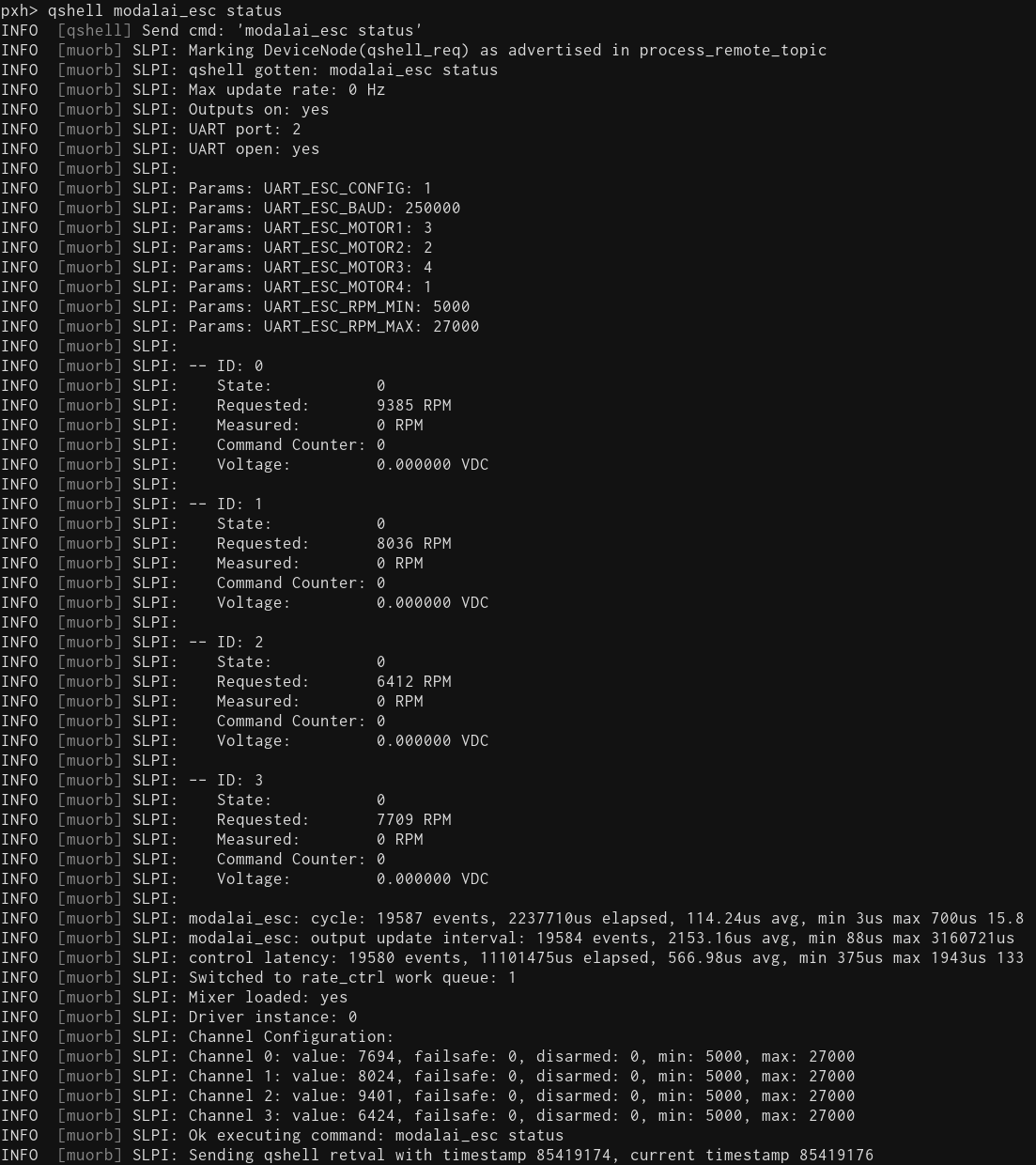
Question from customer - the modalai esc is working fine when commanded, but the RPM and voltage feedback is not available. I have attached a screenshot of the modalai_esc status which shows the feedback isn't coming in. I checked the connections, they seem fine.
-
Hello, thanks for reporting. Good news is we already have a fix in for via this commit:
https://github.com/modalai/px4-firmware/commit/577fec3b9a843b709086fc07b913b2c194367e10It's slated to release in our next platform release (platform release 0.9), I can't mention the release date, as the release gods will then delay it... but we are getting close!!!!!
There are pre-release channels available for developers, captured here: https://docs.modalai.com/configure-pkg-manager/#dev
-
Hey, thanks for that. I was able to pull the voxl-dev branch and got it working on the VOXL2, I can see the feedback of the RPM on the mavlink topic SERVO_OUTPUT_RAW. But the frequency is at 10Hz.
When I try to use the following commandmavlink stream -u "port_number" -s SERVO_OUTPUT_RAW -r 100
I get an error stream SERVO_OUTPUT_RAW not found
From the uart_esc code in px4-firmware I see that the uorb topic thats being used for RPM information is ESC_STATUS. And doing the following commands yields no result. The frequency is still 10Hz
mavlink stream -u "port_number" -s ESC_STATUS -r 100
mavlink stream -u "port_number" -s ESC_INFO -r 100
Is there anything I can do to increase the frequency of the message ?
-
Sorry for the lag, what if you use
px4-listener esc_status?If it's showing up there, likely we need to modify something to get this offboard....
-
So when i try px4-listener it says command not found.
The command that works is
listener esc_status
This produces the following resutls
never publishedBut after some investigation, the uorb topic with the rpm information is
actuator_outputsI can read the output

This topic is being published at 500Hz
I tried to increase the rate of the following mavlink topics
mavlink stream -u 15446 -s actuator_output -r 100
mavlink stream -u 15446 -s ACTUATOR_OUTPUT -r 100
mavlink stream -u 15446 -s actuator_outputs -r 100
mavlink stream -u 15446 -s ACTUATOR_OUTPUTS -r 100Which results in the following error message
ERROR [mavlink] stream ACTUATOR_OUTPUTS not found (same for all other) -
Fixed the problem, the mavlink stream name is SERVO_OUTPUT_RAW_0.
changing that to 200Hz gives us the RPM feedback at 200Hz on mavros
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login