Seeker drone "backtracking" when it stops to hover
-
Hi devs
I have a Seeker drone and i have been testing it extensively indoors with VIO. It works well enough in most situations and im happy with it. But i have been witnessing a behavior sometimes that i could not understand why.
After flying for some distance in Position mode, i would release the sticks and let the drone hover in place. When i do that, sometimes the drone "backtracks" (heading does not change) a little (as much as 1 metre sometimes).
I pulled out the flight logs and saw:
-When i release the sticks, the setpoint is set and PX4 activates its position controller. When the Seeker was moving it was using the velocity controller
-The local position estimate continued propagating forward in the direction of my stick although i have already released it.
-The drone responds by correctly reversing/"backtracking" to hover at the setpoint position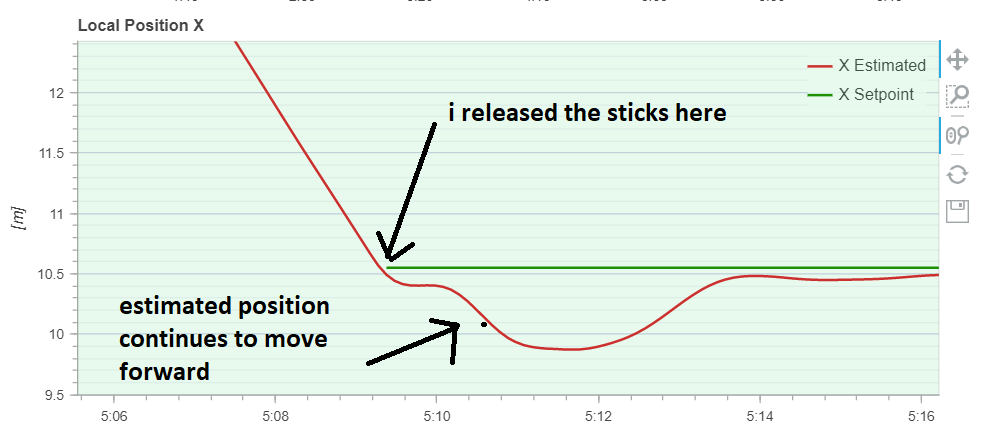
How could i minimize/prevent this from happening?
-
I don't work for Modal, so take this with a grain...
MPC_POS_MODEcontrols some of this behavior. https://docs.px4.io/v1.12/en/advanced_config/parameter_reference.html has a description and you can try the other options to see how that influences the behavior.https://docs.px4.io/v1.9.0/en/config_mc/advanced_mc_position_tuning.html Should help with some of the tuning parameters that control position behavior.
Additionally, the PID loop for position might need some tuning if you want it to stop more aggressively.
-
I don't work for Modal, so take this with a grain...
MPC_POS_MODEcontrols some of this behavior. https://docs.px4.io/v1.12/en/advanced_config/parameter_reference.html has a description and you can try the other options to see how that influences the behavior.https://docs.px4.io/v1.9.0/en/config_mc/advanced_mc_position_tuning.html Should help with some of the tuning parameters that control position behavior.
Additionally, the PID loop for position might need some tuning if you want it to stop more aggressively.
@Steve-Turner said in Seeker drone "backtracking" when it stops to hover:
I don't work for Modal, so take this with a grain...
MPC_POS_MODEcontrols some of this behavior. https://docs.px4.io/v1.12/en/advanced_config/parameter_reference.html has a description and you can try the other options to see how that influences the behavior.https://docs.px4.io/v1.9.0/en/config_mc/advanced_mc_position_tuning.html Should help with some of the tuning parameters that control position behavior.
Additionally, the PID loop for position might need some tuning if you want it to stop more aggressively.
Thanks for the suggestion but I'm quite certain it has nothing to do with MPC_POS_MODE nor the tuning of the velocity/position controller. The phenomenon I described only happens sometimes - especially when VIO quality is low for that stretch of journey just before the drone comes to a stop
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login