Drone not switching flight modes
-
We are having issues with our VOXL Flight. The drone is refusing to switch flight modes from Manual to Position, Altitude or even Offboard. We are attempting to fly it indoors using Offboard mode. The QVIO server is running and working fine, the necessary indoor flight params have been updated. So I am not sure what is causing this issue. The main error being outputted by QGC is "Check for a valid position estimate, Switching to mode <flight_mode> is currently not possible. I have attached an image of the list of errors being outputted.
We recently updated PX4 to the latest stable release: 1.13.0 and the VOXL version is 3.3.0-0.5.0.
Any advice on how to tackle this would be great!!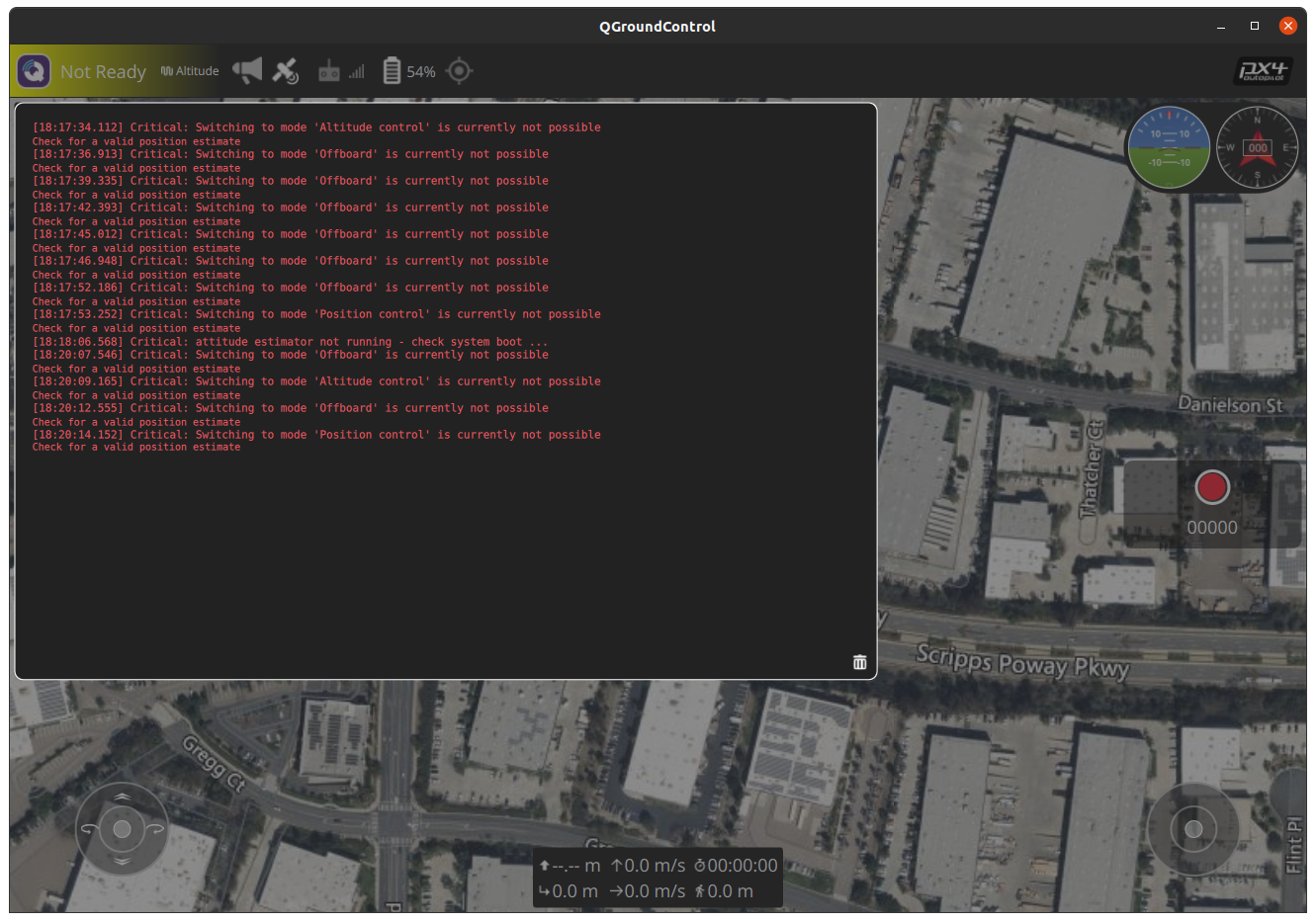
Thanks!
-
Can you please look at the Troubleshooting VIO doc for "Position Mode Rejected" and see if that helps?
https://docs.modalai.com/flying-with-vio/#troubleshooting-vio
-
I changed a few PX4 params stated in the link you posted. I stopped most voxl services. And then did
voxl-calibrate-imu-tempsfirst followed byvoxl-calibrate-imu. Rebooted the drone and started/configured all the necessary voxl-services. Now I am able to switch to Position and Altitude. But not Offboard mode. Same error as earlierCheck for a valid position estimateThe drone is stationary on my desk and not flying. Can I only switch to offboard mode when the drone is in the air? Are there any params that I might be missing to make sure it switches to Offboard mode? Will installing a newer voxl version fix the issue?