GPS not acquiring
-
Using the m500 ModalAI drone, and I cannot run "mission mode" from QGC because the GPS cannot acquire. As far as I am aware and could find, the PIXhawk 4 GPS module should acquire automatically as long as it is plugged into the Flight core. However, throughout my three hours of testing, the GPS could not acquire, with the corresponding LED light blinking blue (https://docs.px4.io/master/en/getting_started/led_meanings.html)
I tried unplugging/replugging GPS, resetting drone and QGC, and even sending MAVLink messages to reset the GPS (both cold and hot).
How can I get the GPS to acquire?
-
Hi @Daniel-Ryu ,
Yes you are correct it should find the satellites after power up (within a minute or two...).
So this is strange. Are you inside or outside? Inside our office, we have a hard time getting signal occasionally.
Next, can you validate the
GPS_1_CONFIGis default ('GPS1')?
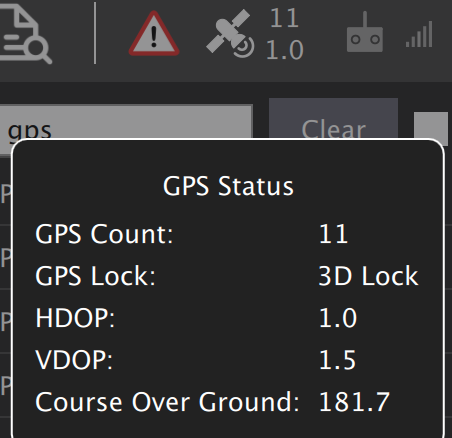
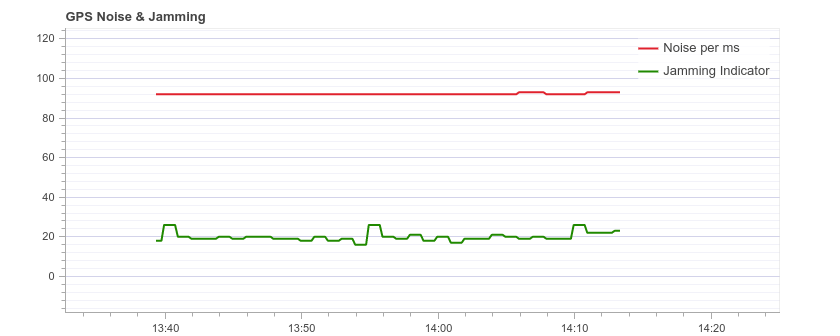
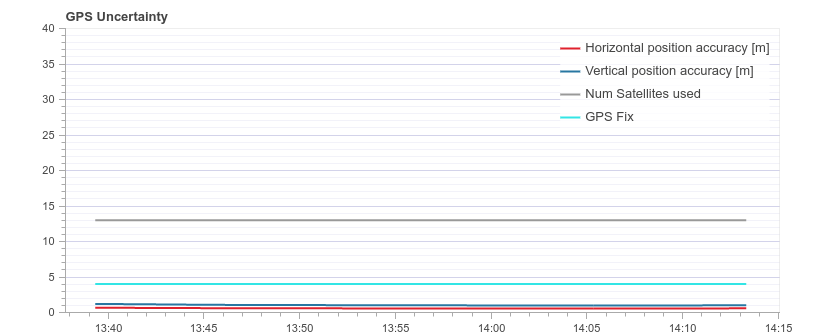
Here's what I see with the same setup on my end as a reference:
Thanks!
-
gps_1_config is set to GPS1.
I will be checking for these errors next. Please advise if there is anything else I should confirm/check
-
Hey Daniel,
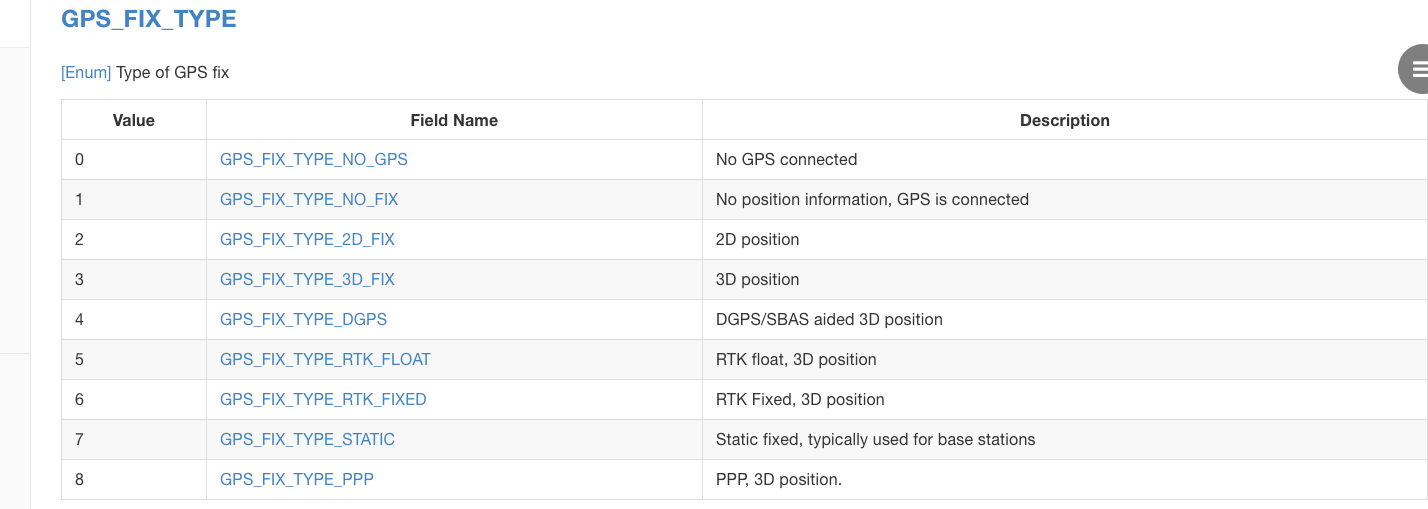
From the GPS logs you posted, it looks like GPS is working. I see that you have a DGPS fix at 4 and 13 satellites.
Are you using indoor or outdoor parameters? For instance, EKF2_AID_MASK can be set for indoor or outdoor; it's shipped with indoor configuration. This parameter needs GPS set.
For updating parameters:
https://docs.modalai.com/upload-px4-parameters/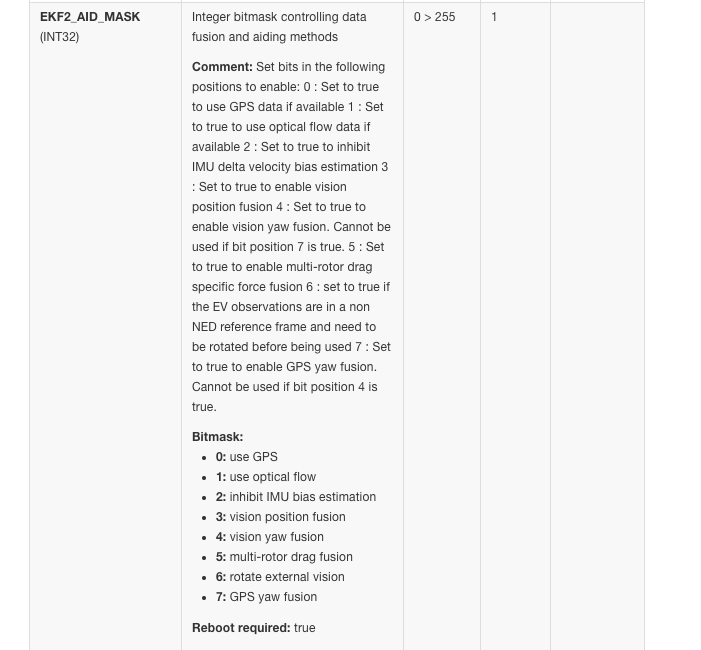
-
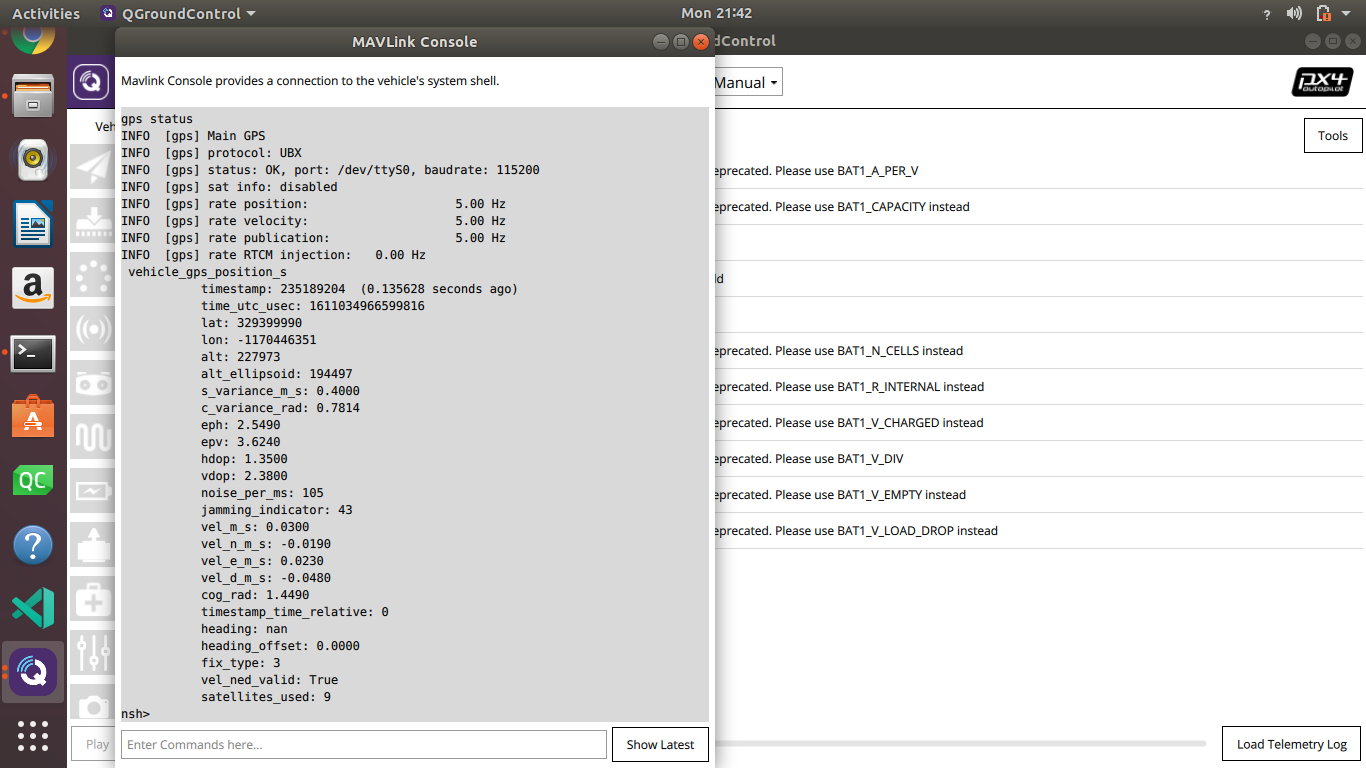
Also in the QGC MAVlink console, try gps status and see what comes up.
-
-
Resetting the parameters to outdoor mode seemed to have worked! The GPS acquired a signal and I am able to fly in Mission mode. Thank you!
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login