How To Set VIO Position Offset?
-
The drone I'm working on has an interesting issue that when I'm flying in VIO mode and apply a yaw, the drone will move around a point in the front rather than just moving around the middle. It is kind of hard to describe through text, but imagine the drone moving around a point in front of it instead of just applying a yaw from the center of the drone. I believe the issue is because the drone does not have the correct VIO position offset. The first place I looked was on the PX4 parameters, and I noticed the EKF2_EV_POS_X, EKF2_EV_POS_Y and EKF2_EV_POS_Z parameters. But there was information that the VIO position offsets are handled by voxl-vision-px4 here: https://gitlab.com/voxl-public/flight-core-px4/px4-parameters/-/blob/master/platforms/v1.13/M500/M500_v1_param_rev_A.params
I was wondering what values I would have to change in voxl-vision-px4.conf to set the VIO position offset. In the ModalAI technical documentation here, it gives "T_imu_wrt_body", and "T_stereo_wrt_body" options, but I am using the tracking camera for VIO. Would I change those to affect the VIO position offset of the drone?
Or is there a T_tracking_wrt_body option that is not listed?
-
Have you looked at the video tutorial here? https://docs.modalai.com/configure-extrinsics/
-
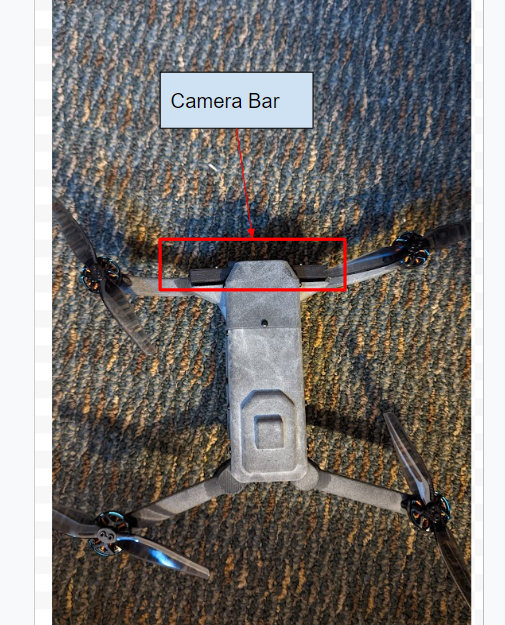
We attempted this and did not see a whole lot of change. The camera bar in relation to the IMUs are fairly close to the m500 extrinsic file (which appear to be default). We still changed them in accordance with James tutorial (in link above) and saw same movements.
I am wondering if it has to do more with the relation of our camera bar on our UAV being far forward from the center of gravity
Going to take a look at the qvio configuration file for the seeker (as that sits further forward) and see if I can find anything interesting.
We do not see this in GPS flight, so we do believe it is the cameras. Will post more as we learn more
-
Scratch that. We tested more in a GPS rich environment and are seeing similar yaw features.
This might just be an issue with the hardware pitch.
Will investigate level horizon in air calibration seen here: https://docs.modalai.com/calibrate-px4-horizon/
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login