What is for "Avoidance / Collision prevention error"
-
Hi guys,
I'm on testing Collision prevention as like below link

Page not found
ModalAI technical documentation for VOXL and VOXL 2 Companion Computers for PX4 and ArduPilot Obstacle Avoidance and GPS-denied navigation, assembled in the USA
ModalAI Technical Docs (docs.modalai.com)
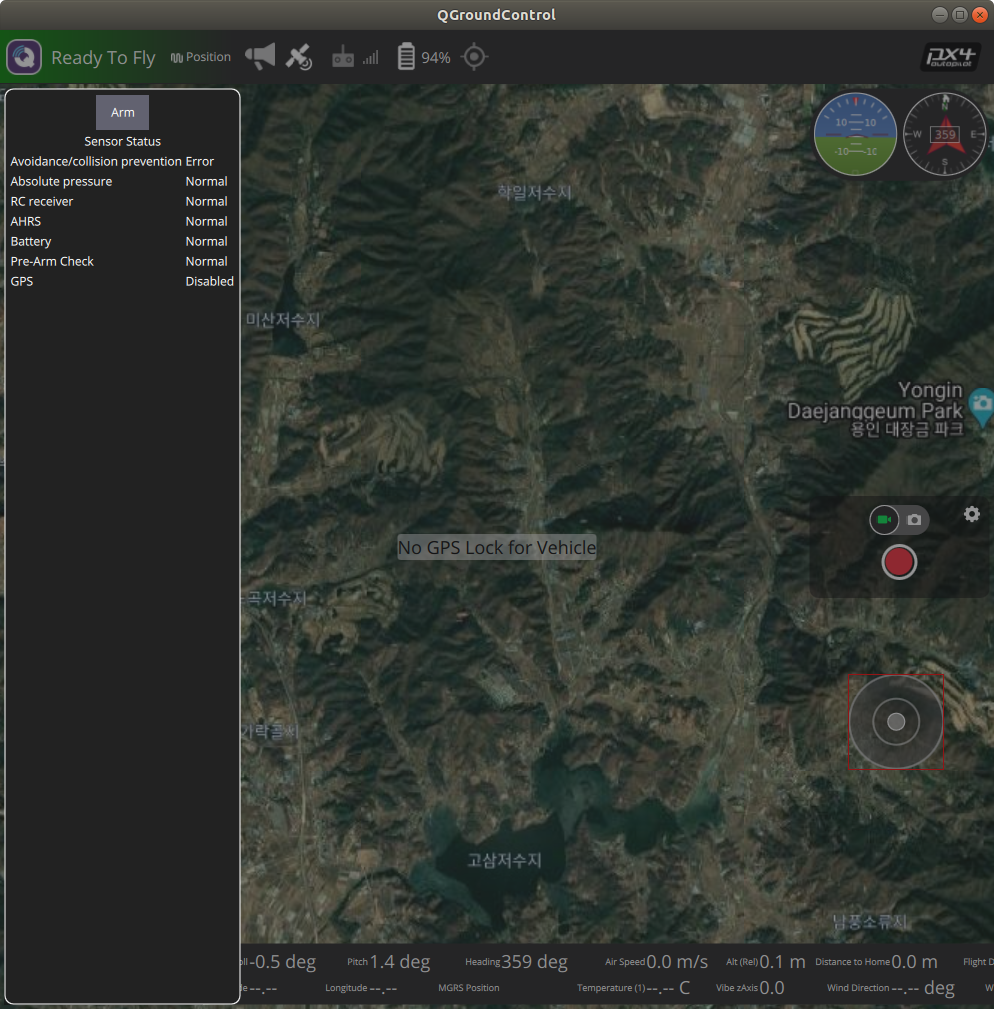
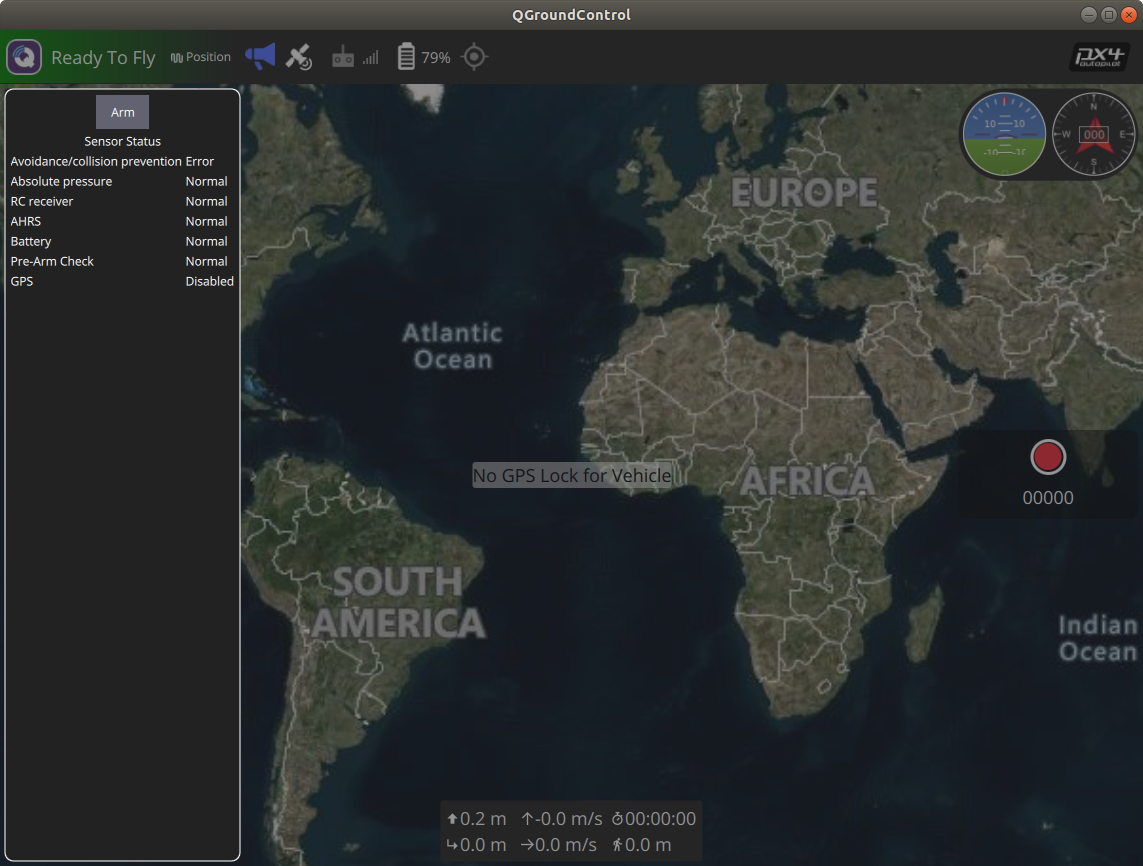
Also, I already verified VIO data and position mode but, as you can see below picture, I got a message Avoidance / collision prevention error.
because of this error, I cannot arm my flight in pre-check.
Could you please let me know why collision prevention error is occured in pre-check and how to revolve it?
Thanks,
-
Hi @shlee853 ,
Can you check your settings compared to these?
Please advise if they are the same and you're having issues.
Thanks!
-
Hi @shlee853 ,
Can you check your settings compared to these?
Please advise if they are the same and you're having issues.
Thanks!
-
We calibrate the stereo sensors before shipping on the Flight Decks and m500s. Not sure if you have that or the VOXL + image sensors.
Without stereo calibration, yes there's likely to be issues.
How about trying this and seeing how things look?
https://docs.modalai.com/voxl-vision-px4-collision-prevention/#debug-tools -
We calibrate the stereo sensors before shipping on the Flight Decks and m500s. Not sure if you have that or the VOXL + image sensors.
Without stereo calibration, yes there's likely to be issues.
How about trying this and seeing how things look?
https://docs.modalai.com/voxl-vision-px4-collision-prevention/#debug-tools@modaltb I calibrated stereo camera and tracking camera. and I found calibrated file here
yocto:/# ls /home/root/.ros/camera_info/
left.yaml right.yaml tracking.yamlI also verified depth information using stereo camera and tracking information using tracking camera.
But, I'm not resolve Avoidance/Collision prevention Error so far.
Also, I cannot perform object avoidance function.
Could you please let me know some advice? why Avoidance/collision prevention error message appeared on QGC?
my flight s/w version is like this.
yocto:~# voxl-version
system-image: ModalAI 3.2.0 BUILDER: ekatzfey BUILD_TIME: 2021-02-05_19:54
kernel: #1 SMP PREEMPT Fri Feb 5 20:03:22 UTC 2021 3.18.71-perf
factory-bundle: 1.0.1 (Yocto installation)architecture: aarch64
processor: apq8096
os: GNU/Linuxvoxl-suite:
Package: voxl-suite
Version: 0.2.0
Depends: docker, imu_app (= 0.0.6), libvoxl_io (= 0.5.2), voxl-cam-manager (= 0.2.2), voxl-docker-support (= 1.1.1), voxl-hal3-tof-cam-ros (= 0.0.2), voxl-modem (= 0.10.0), voxl-nodes (= 0.0.8), voxl-rtsp (= 1.0.2), voxl-utils (= 0.5.2), voxl-vision-px4 (= 0.6.8), voxl_imu (= 0.0.4), voxl-time-sync (= 0.0.1), voxl-vpn (= 0.0.2), librc_math (= 1.1.2), libmodal_pipe (= 1.2.2), modalai-vl (= 0.1.3)
Status: install user installed
Section: base
Architecture: armv7a
Maintainer: james@modalai.com
MD5Sum: af706cd3c1ea59f274f2ed9b93141f1d
Size: 870
Filename: voxl-suite_0.2.0.ipk
Description: meta-package to install all of the voxl-suite
Installed-Time: 245
-
I ran into the same issue where QGC displays:
Avoidance/collision prevention ErrorI think i know what is causing this issue in case there isnt any resolution yet.
It seems that QGC is interpreting what is sent from the AP the onboard_control_sensors_health bitfield in the MAV_SYS_STATUS_SENSOR message. And the bit responsible for this is MAV_SYS_STATUS_OBSTACLE_AVOIDANCE.
Looking at the PX4's Commander module, it also seems that the MAV_SYS_STATUS_OBSTACLE_AVOIDANCE bit is used for both obstacle avoidance AND collision prevention. While the VOXL-CAM is communicating with the AP for Collision Prevention, this health bit will always be false because the Avoidance system is not setup.
https://github.com/PX4/PX4-Autopilot/blob/ae0bb8371df1d2d2816e5ec2db67ca3936d0221c/src/modules/commander/Commander.cppBut i have yet to confirm if in spite of this, the Collision Prevention function still works. FYI i have a brand new Seeker which i have not tested in flight yet. Will anyone be able to advise before i go for my first flight?
-
I ran into the same issue where QGC displays:
Avoidance/collision prevention ErrorI think i know what is causing this issue in case there isnt any resolution yet.
It seems that QGC is interpreting what is sent from the AP the onboard_control_sensors_health bitfield in the MAV_SYS_STATUS_SENSOR message. And the bit responsible for this is MAV_SYS_STATUS_OBSTACLE_AVOIDANCE.
Looking at the PX4's Commander module, it also seems that the MAV_SYS_STATUS_OBSTACLE_AVOIDANCE bit is used for both obstacle avoidance AND collision prevention. While the VOXL-CAM is communicating with the AP for Collision Prevention, this health bit will always be false because the Avoidance system is not setup.
https://github.com/PX4/PX4-Autopilot/blob/ae0bb8371df1d2d2816e5ec2db67ca3936d0221c/src/modules/commander/Commander.cppBut i have yet to confirm if in spite of this, the Collision Prevention function still works. FYI i have a brand new Seeker which i have not tested in flight yet. Will anyone be able to advise before i go for my first flight?
Yes, PX4's obstacle avoidance and Collision Prevention are separate features. We only support the Collision Prevention functionality which is governed by the PX4 CP_DIST and similar parameters. Make sure the COM_OBS_AVOID parameter is OFF (0) in PX4
James
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login