Preflight Fail: Compass Sensor 0 missing
-
@Eric-Katzfey Now, it arms successfully, even though it says Preflight Fail: heading estimate not stable and Preflight Fail: Yaw estimate error. Is this an issue?
@Nitin-Varma-Vegesna If you are just flying in manual or altitude hold modes then those shouldn't be an issue.
-
@Nitin-Varma-Vegesna If you are just flying in manual or altitude hold modes then those shouldn't be an issue.
-
This post is deleted!
This post is deleted! -
@Nitin-Varma-Vegesna If you are just flying in manual or altitude hold modes then those shouldn't be an issue.
@Eric-Katzfey What about autonomous control indoors, and how could that be fixed if it's an issue? This is with a new GPS as well. Do I have to configure anything? Also, for the EKF2_GPS_CTRL, I reset to default: 7
-
@Eric-Katzfey What about autonomous control indoors, and how could that be fixed if it's an issue? This is with a new GPS as well. Do I have to configure anything? Also, for the EKF2_GPS_CTRL, I reset to default: 7
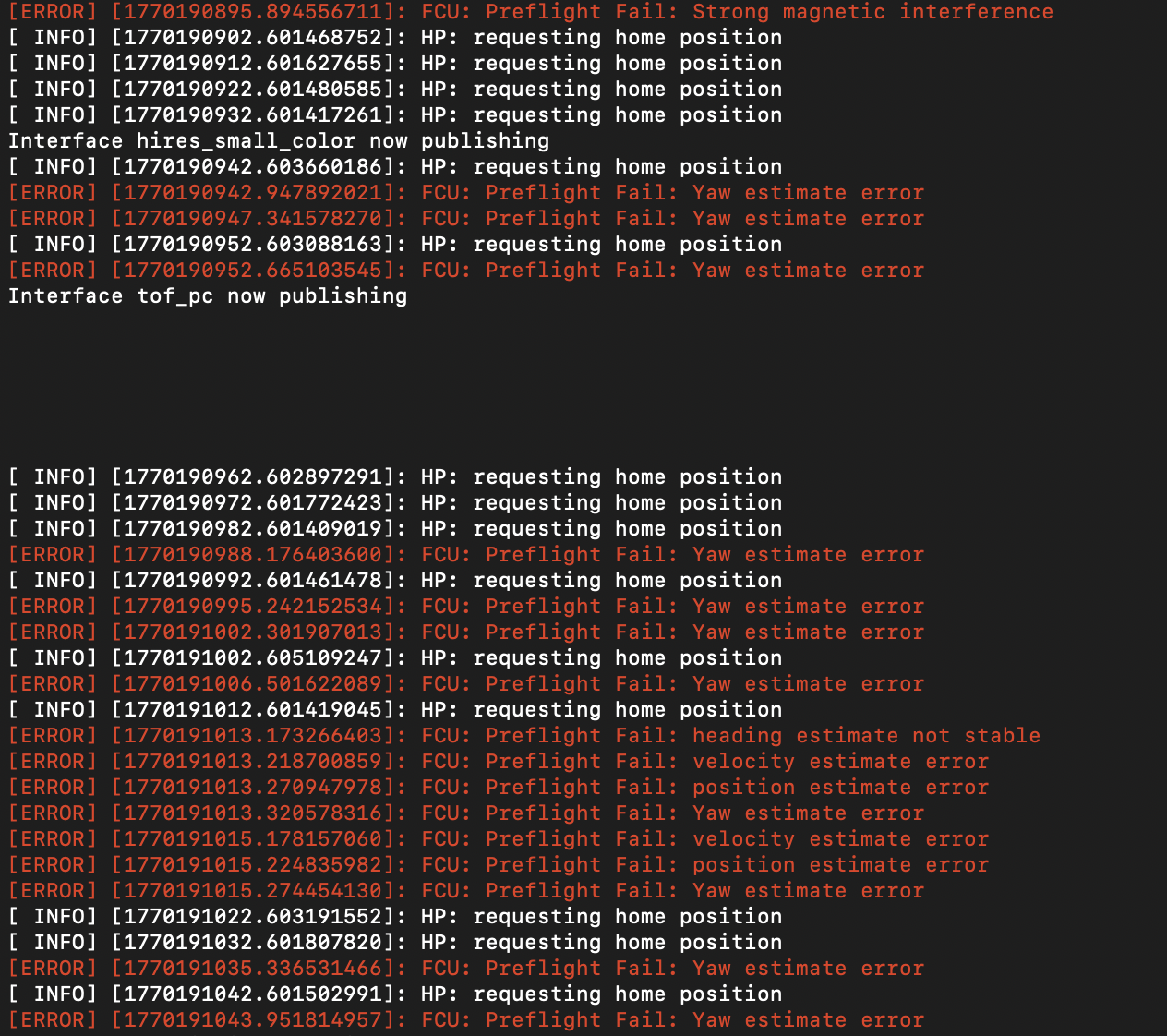
Here is an image of when I start autonomous exploration (not flying yet) but moving it with hand, I am getting these preflight errors that I used to not get.
This is with SYS_HAS_GPS, and SYS_HAS_MAG to 1, EKF2_MAG_TYPE = Automatic, EKF2_GPS_CTRL = 7
Also, voxl-inspect-gps is saying NO GPS for fix type:
dt(ms) |fix type|Sats|Latitude(deg)|Longitude(deg)| Alt(m) |Vel(m/s)|HorErr(m)|AltErr(m)|
129.5 | NO GPS | 0 | 0.0000000 | 0.0000000 | -17.0 | 0.00 | 4294967.295 | 4092465.408 |^C -
Here is an image of when I start autonomous exploration (not flying yet) but moving it with hand, I am getting these preflight errors that I used to not get.
This is with SYS_HAS_GPS, and SYS_HAS_MAG to 1, EKF2_MAG_TYPE = Automatic, EKF2_GPS_CTRL = 7
Also, voxl-inspect-gps is saying NO GPS for fix type:
dt(ms) |fix type|Sats|Latitude(deg)|Longitude(deg)| Alt(m) |Vel(m/s)|HorErr(m)|AltErr(m)|
129.5 | NO GPS | 0 | 0.0000000 | 0.0000000 | -17.0 | 0.00 | 4294967.295 | 4092465.408 |^C@Nitin-Varma-Vegesna If you re-install or update your SDK to the latest it will properly set all of the parameters.
-
@Nitin-Varma-Vegesna If you re-install or update your SDK to the latest it will properly set all of the parameters.
@Eric-Katzfey I would rather not delete everything outside of /data/, is there a way to reset the params of px4 another way? This issue only happens when I start exploration, and I move the drone up with my hand slightly, but why do I get FCU: Vision Failure.
-
@Eric-Katzfey I would rather not delete everything outside of /data/, is there a way to reset the params of px4 another way? This issue only happens when I start exploration, and I move the drone up with my hand slightly, but why do I get FCU: Vision Failure.
@Nitin-Varma-Vegesna You can set parameters via
voxl-configure-px4-params. -
@Nitin-Varma-Vegesna You can set parameters via
voxl-configure-px4-params.@Eric-Katzfey That is what I did to reset the params prior to this happening.
-
@Eric-Katzfey That is what I did to reset the params prior to this happening.
@Nitin-Varma-Vegesna Well, that's why I asked you to do the full SDK installation. If you install the SDK and set it up as we do from the factory then it should be working like when you first got it. If it doesn't then that potentially points to some damage caused by the crash and not some configuration change you have made since then.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login