Cannot use VOXL2 board-only with C-04 camera config
-
I am trying to setup a VOXL2 board with the C-04 camera config shown here:
https://docs.modalai.com/voxl2-camera-configs/#c-06-tof-hires-and-tracking-d0005-starlingI flashed a newer version of voxl sdk and setup as VOXL2-board only as shown below:
────────────────────────────────────────────────────────────────────────────────
system-image: 1.8.02-M0054-14.1a-perf
kernel: #1 SMP PREEMPT Mon Nov 11 22:47:44 UTC 2024 4.19.125
────────────────────────────────────────────────────────────────────────────────
hw platform: M0054
mach.var: 1.0.1
SKU: MCCA-M0054-CC-T0-M0-X0
────────────────────────────────────────────────────────────────────────────────
voxl-suite: 1.4.5Trying to follow the guide, the first issue I see is that voxl-configure-cameras only gives me the following options:
26 - M0173 Starling 2 IMX412 + dual AR0144
27 - M0173 Starling 2 PMD IMX412 triple AR0144
28 - M0173 Starling 2 Max dual IMX412 + dual AR0144
29 - M0173 Starling 2 Max PMD + dual IMX412 + dual AR0144
30 - M0173 Starling 2 Prototype dual PMD + dual IMX412 + dual AR0144
36 - M0173 Seeker V5+ IMX412 + dual AR0144
37 - M0173 Seeker V5+ IMX412 + dual AR0144 + Boson
46 - M0173 Seeker V5+ IMX664 + dual AR0144
47 - M0173 Seeker V5+ IMX664 + dual AR0144 + Boson
I just did C for custom configGiven this, I started trying to manually follow the others guides and adding the binaries manually and using config helper:
https://docs.modalai.com/voxl2-image-sensors/I ran:
camera-server-config-helper tracking:ov7251:2 hires:imx214:3
cp /usr/share/modalai/chi-cdk/imx214/com.qti.sensormodule.imx214_3.bin /usr/lib/camera/
cp /usr/share/modalai/chi-cdk/ov7251/com.qti.sensormodule.ov7251_2.bin /usr/lib/camera/When I run voxl-camera-server -l I only see 1 camera detected, and it seems to be the ov7251, but then I then run the config helper with just he tracking cam, the voxl-camera-server still fails to start the camera. I am not in a place right now to swap cameras to see if its hardware, but just want to make sure I am doing the config and mapping correctly.
Especially since, when I look at the qrb5165-configure-camera script, the mapping from HWID to bin makes zero sense to me, especially for C-04:
https://gitlab.com/voxl-public/voxl-sdk/services/voxl-camera-server/-/blob/sdk-1.0.0/scripts/qrb5165-configure-cameras?ref_type=tagsAny input is appreciated. I think I had been thorough with your docs up until now, but still no luck.
-
I am trying to setup a VOXL2 board with the C-04 camera config shown here:
https://docs.modalai.com/voxl2-camera-configs/#c-06-tof-hires-and-tracking-d0005-starlingI flashed a newer version of voxl sdk and setup as VOXL2-board only as shown below:
────────────────────────────────────────────────────────────────────────────────
system-image: 1.8.02-M0054-14.1a-perf
kernel: #1 SMP PREEMPT Mon Nov 11 22:47:44 UTC 2024 4.19.125
────────────────────────────────────────────────────────────────────────────────
hw platform: M0054
mach.var: 1.0.1
SKU: MCCA-M0054-CC-T0-M0-X0
────────────────────────────────────────────────────────────────────────────────
voxl-suite: 1.4.5Trying to follow the guide, the first issue I see is that voxl-configure-cameras only gives me the following options:
26 - M0173 Starling 2 IMX412 + dual AR0144
27 - M0173 Starling 2 PMD IMX412 triple AR0144
28 - M0173 Starling 2 Max dual IMX412 + dual AR0144
29 - M0173 Starling 2 Max PMD + dual IMX412 + dual AR0144
30 - M0173 Starling 2 Prototype dual PMD + dual IMX412 + dual AR0144
36 - M0173 Seeker V5+ IMX412 + dual AR0144
37 - M0173 Seeker V5+ IMX412 + dual AR0144 + Boson
46 - M0173 Seeker V5+ IMX664 + dual AR0144
47 - M0173 Seeker V5+ IMX664 + dual AR0144 + Boson
I just did C for custom configGiven this, I started trying to manually follow the others guides and adding the binaries manually and using config helper:
https://docs.modalai.com/voxl2-image-sensors/I ran:
camera-server-config-helper tracking:ov7251:2 hires:imx214:3
cp /usr/share/modalai/chi-cdk/imx214/com.qti.sensormodule.imx214_3.bin /usr/lib/camera/
cp /usr/share/modalai/chi-cdk/ov7251/com.qti.sensormodule.ov7251_2.bin /usr/lib/camera/When I run voxl-camera-server -l I only see 1 camera detected, and it seems to be the ov7251, but then I then run the config helper with just he tracking cam, the voxl-camera-server still fails to start the camera. I am not in a place right now to swap cameras to see if its hardware, but just want to make sure I am doing the config and mapping correctly.
Especially since, when I look at the qrb5165-configure-camera script, the mapping from HWID to bin makes zero sense to me, especially for C-04:
https://gitlab.com/voxl-public/voxl-sdk/services/voxl-camera-server/-/blob/sdk-1.0.0/scripts/qrb5165-configure-cameras?ref_type=tagsAny input is appreciated. I think I had been thorough with your docs up until now, but still no luck.
From your post i see that you are using the Linux Kernel that is configured for camera front end M0173. I can tell this from
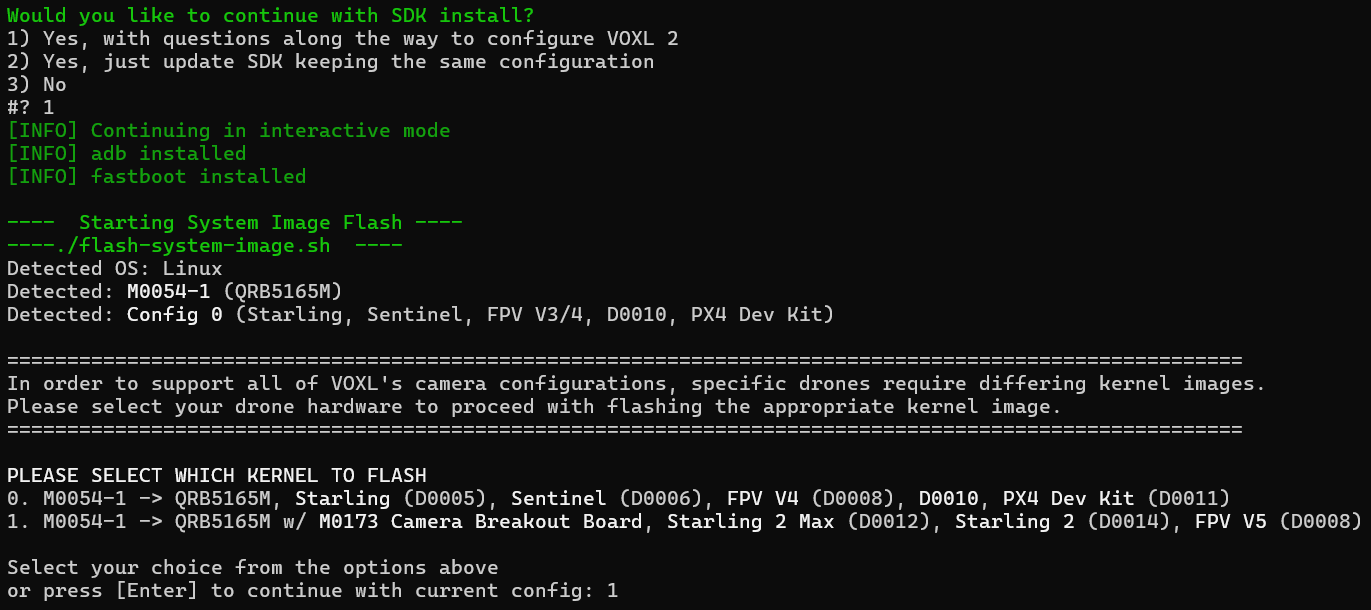
mach.var: 1.0.1in your voxl-version output above.You need to re-install your SDK and make sure to select the kernel option. You will need to select option 0. See the following thread for more details, however the that user's issue was the opposite - they had 1.0.0 and needed 1.0.1. You need 1.0.0.
Camera not working after Upgrading VOXL SDK
@Alex-Kushleyev Thank you so much. Now the camera is working. Previously, during the installation, I selected a second option of continuing the installation ...
ModalAI Forum (forum.modalai.com)
Alex
-
From your post i see that you are using the Linux Kernel that is configured for camera front end M0173. I can tell this from
mach.var: 1.0.1in your voxl-version output above.You need to re-install your SDK and make sure to select the kernel option. You will need to select option 0. See the following thread for more details, however the that user's issue was the opposite - they had 1.0.0 and needed 1.0.1. You need 1.0.0.
Camera not working after Upgrading VOXL SDK
@Alex-Kushleyev Thank you so much. Now the camera is working. Previously, during the installation, I selected a second option of continuing the installation ...
ModalAI Forum (forum.modalai.com)
Alex
Ok thanks, I will select "0" here:

and just for my understanding, every starling 2 and starling 2 max has that M0173 board inside of it? I thought I looked at the drones to check this, but didn't notice it I guess.
Thanks for this info.
Although I will probably start a new thread, would this config affect the use of the VOXL-io board. I am trying to use voxl-ardupilot + voxl-io on J4, but its not detected via voxl-2-io
Thanks
-
Ok thanks, I will select "0" here:
and just for my understanding, every starling 2 and starling 2 max has that M0173 board inside of it? I thought I looked at the drones to check this, but didn't notice it I guess.
Thanks for this info.
Although I will probably start a new thread, would this config affect the use of the VOXL-io board. I am trying to use voxl-ardupilot + voxl-io on J4, but its not detected via voxl-2-io
Thanks
@Sam-Kiley , yes, every Starling 2 / MAX is going to have M0173 board installed and needs to use the option 1.
Alex

Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login