ROS Melodic Sourcing
-
Hi,
-
We have a Starling 2 (VOXL 2 autopilot running PX4) and wanted to run SLAM. We have some files of ROS Melodic installed (including voxl_mpa_to_ros_node), but we're unable to source ROS Melodic (it appears that there is no such file or directory when we tried "source /opt/ros/melodic/setup.bash". What could be the issue here and what would the next steps would be?
-
We also wanted to understand if we can uninstall ROS Melodic and install ROS2 Humble (or other distributions) on the same VOXL2 autopilot as ROS2 works better with our pipeline.
Thanks!
-
-
Hi,
-
We have a Starling 2 (VOXL 2 autopilot running PX4) and wanted to run SLAM. We have some files of ROS Melodic installed (including voxl_mpa_to_ros_node), but we're unable to source ROS Melodic (it appears that there is no such file or directory when we tried "source /opt/ros/melodic/setup.bash". What could be the issue here and what would the next steps would be?
-
We also wanted to understand if we can uninstall ROS Melodic and install ROS2 Humble (or other distributions) on the same VOXL2 autopilot as ROS2 works better with our pipeline.
Thanks!
Hi,
- ROS2 Melodic requires Ubuntu 20.04 and the VOXL runs Ubuntu 18.04. You could install ROS2 Foxy following this guide.
$ apt-get install voxl-ros2-foxy $ source /opt/ros/foxy/local_setup.bash- Likewise you can't directly use ROS2 humble on the VOXL because it requires Ubuntu 22.04. We usually run ROS2 inside a docker container. Check out the prebuilt ROS2 images you can have as the base (https://hub.docker.com/_/ros/).
Let me know if that helps!
Ted
-
-
Hi,
-
Is it possible to upgrade the Ubuntu version to 22.04 on the VOXL2 autopilot? This is to use ROS2 Humble without a docker.
-
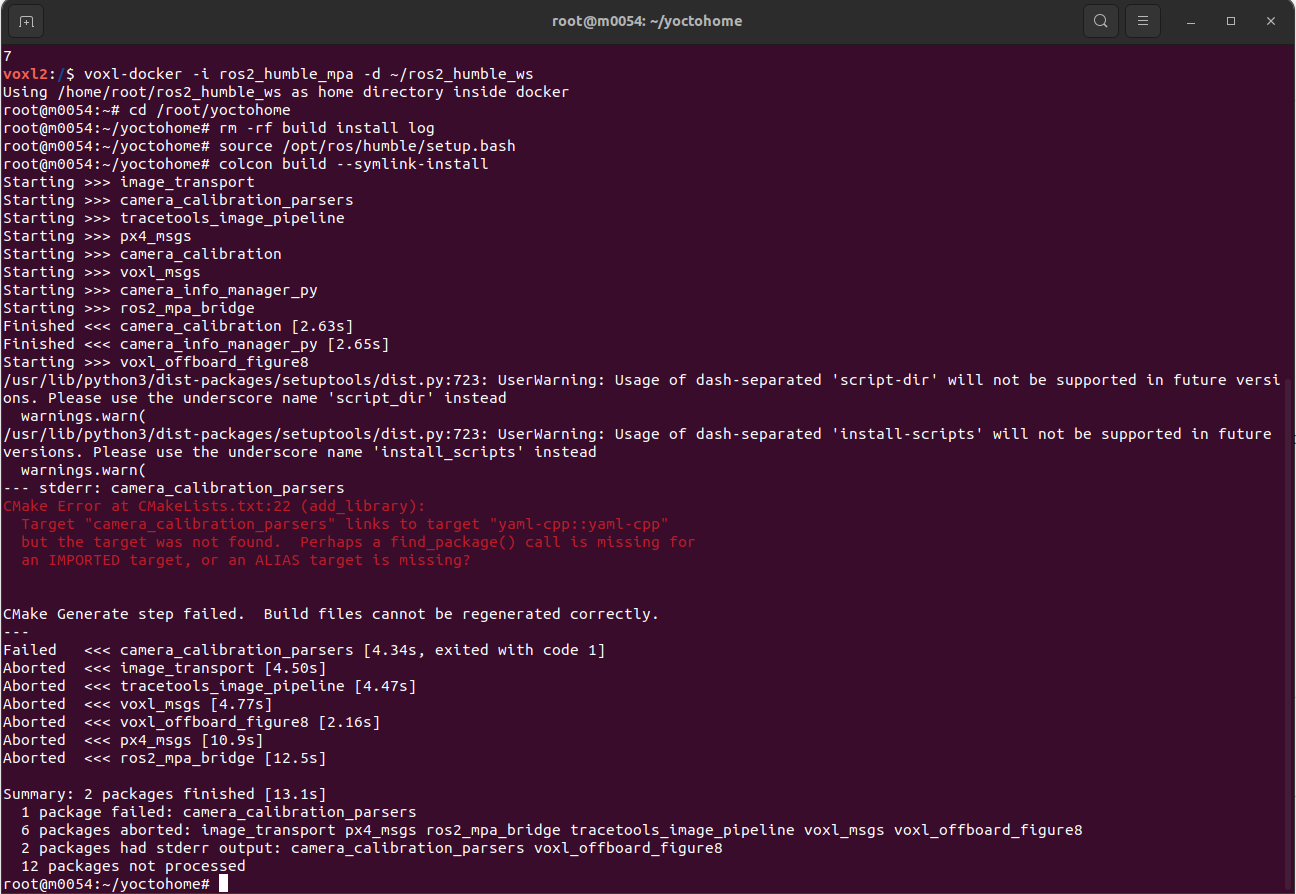
Currently to run ROS2 Humble on the existing Ubuntu 18.04 setup, we installed a docker but we're a repeatable issue.The colcon build --symlink-install keeps failing (screenshot attached below). How can we resolve this?
We've also seen a few instances of location conflicts during the installation of ROS2 humble, but have tried to resolve that as and when we see them.
Thanks,
George -
-
Hi,
-
Is it possible to upgrade the Ubuntu version to 22.04 on the VOXL2 autopilot? This is to use ROS2 Humble without a docker.
-
Currently to run ROS2 Humble on the existing Ubuntu 18.04 setup, we installed a docker but we're a repeatable issue.The colcon build --symlink-install keeps failing (screenshot attached below). How can we resolve this?
We've also seen a few instances of location conflicts during the installation of ROS2 humble, but have tried to resolve that as and when we see them.
Thanks,
George@george-kollamkulam As far as question #1, no it is not possible to update to Ubuntu 22.04 on the VOXL 2 autopilot. Updates must come from Qualcomm and then we have to adapt them to the VOXL 2. However, an update to 22.04 is not available.
-
-
Hi,
-
Is it possible to upgrade the Ubuntu version to 22.04 on the VOXL2 autopilot? This is to use ROS2 Humble without a docker.
-
Currently to run ROS2 Humble on the existing Ubuntu 18.04 setup, we installed a docker but we're a repeatable issue.The colcon build --symlink-install keeps failing (screenshot attached below). How can we resolve this?
We've also seen a few instances of location conflicts during the installation of ROS2 humble, but have tried to resolve that as and when we see them.
Thanks,
GeorgeWhere are you getting the image / ROS2 packages? Is this an image that ModalAI maintains?
Just looking at the error, it seems like it can't find the yaml-cpp package. It could be that it's not installed correctly or something's wrong in your CMakeLists.txt. It looks like the yaml-cpp readme has some info for including it in your CMake project.
If you're using camera_calibration_parsers from image common, it might be worth bringing the issue up there.
Let me know if that helps,
Ted -
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login