"Adopted" drone, help setting up
-
@jbhines929 Does your drone have a VOXL on it as well? Or just microhard and some other hardware?
@tom Thanks for the reply. It is a VOXL Flight, so far as I can tell. Has the microhard 'hat' on it. I was able to connect USB. I found a tutorial on your website about setting up the microhard. I was able to connect with USB and ADB and able to go through the setup steps. I appear to be able to ping the VOXL from the GCS computer. I wasn't able to connect yet with MP or QGC, but that may have been because I only had a USB boot Ubuntu and not a full install. (USGOVT computer and it's a pain to install non supported OSes) Hope to find out more later.

-
@tom Thanks for the reply. It is a VOXL Flight, so far as I can tell. Has the microhard 'hat' on it. I was able to connect USB. I found a tutorial on your website about setting up the microhard. I was able to connect with USB and ADB and able to go through the setup steps. I appear to be able to ping the VOXL from the GCS computer. I wasn't able to connect yet with MP or QGC, but that may have been because I only had a USB boot Ubuntu and not a full install. (USGOVT computer and it's a pain to install non supported OSes) Hope to find out more later.
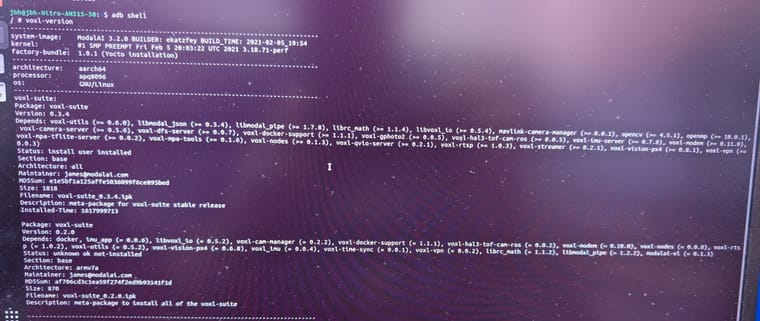
@jbhines929 I'm curious what SDK is on that voxl-flight (It's been a while since I've worked with VOXL 1 personally so it'll take me a sec to get my brain aligned)
What do you see if you ADB in and run the following:
voxl-version voxl-inspect-services -
@jbhines929 I'm curious what SDK is on that voxl-flight (It's been a while since I've worked with VOXL 1 personally so it'll take me a sec to get my brain aligned)
What do you see if you ADB in and run the following:
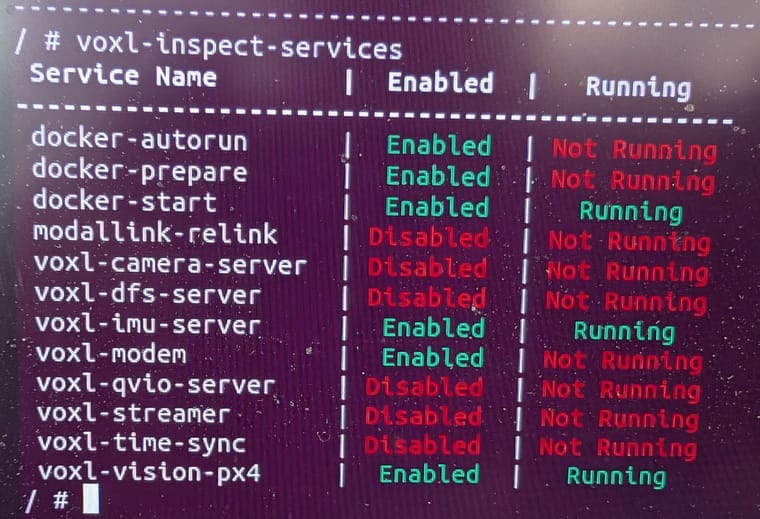
voxl-version voxl-inspect-services@tom no worries! It is a very old system by drone terms. I believe it was acquired in 2020.
-
@tom no worries! It is a very old system by drone terms. I believe it was acquired in 2020.
looks like a lot of services aren't running
-
looks like a lot of services aren't running
@jbhines929 would following the procedure here: https://docs.modalai.com/flash-system-image/ reset it to factory defaults?
-
@jbhines929 would following the procedure here: https://docs.modalai.com/flash-system-image/ reset it to factory defaults?
@jbhines929 I would recommend loading the latest VOXL 1 SDK: 1.2.0 which can be downloaded from downloads.modalai.com
You'll want to follow the steps here: https://docs.modalai.com/flash-system-image/#flashing-a-voxl-sdk-release
-
@jbhines929 I would recommend loading the latest VOXL 1 SDK: 1.2.0 which can be downloaded from downloads.modalai.com
You'll want to follow the steps here: https://docs.modalai.com/flash-system-image/#flashing-a-voxl-sdk-release
@tom I appear to have been successful in updating that. I still haven't been able to connect to VOXL via microhard on QGC. What is the port to use?
-
@tom I appear to have been successful in updating that. I still haven't been able to connect to VOXL via microhard on QGC. What is the port to use?
-
@jbhines929 You'll want to establish a connection like this, where "Server Address" is the IP of the VOXL on the microhard network
You can check this with
ifconfigon VOXL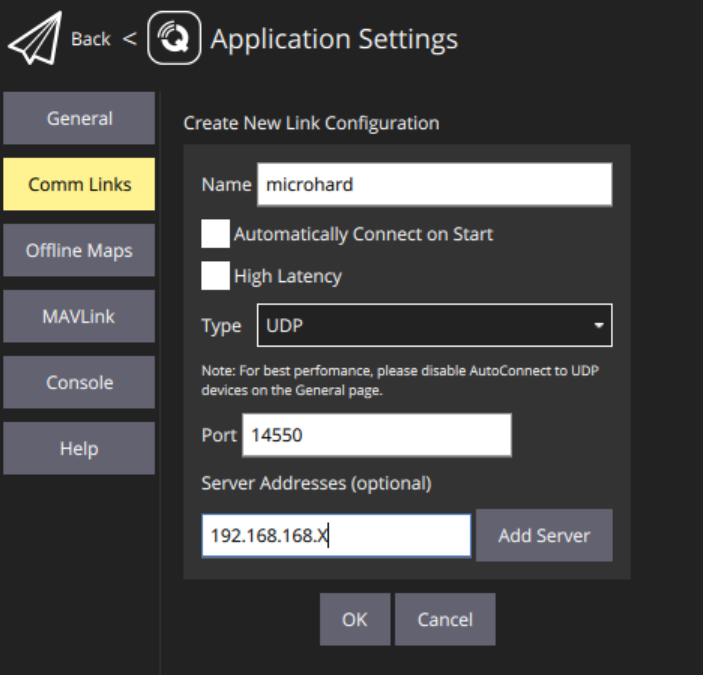
-
@tom I tried that just now. I am able to ping across the microhard network. I can ping the laptop -> VOXL. I can ping VOXL -> laptop, I can even ping each microhard device from either the VOXL or the laptop. It just seems to not be making that final link to QGC. I ran and reran voxl-configure-modem, selecting microhard. I tried with both the default IP and a custom IP. Do I have to do some kind of configureation with teh mavlink server? (I am getting way out of my depth here, lol)
-
@tom I tried that just now. I am able to ping across the microhard network. I can ping the laptop -> VOXL. I can ping VOXL -> laptop, I can even ping each microhard device from either the VOXL or the laptop. It just seems to not be making that final link to QGC. I ran and reran voxl-configure-modem, selecting microhard. I tried with both the default IP and a custom IP. Do I have to do some kind of configureation with teh mavlink server? (I am getting way out of my depth here, lol)
@jbhines929 (I should also specifiy that this is on a personal, fully open laptop, tried on Windows 11 and on Ubuntu) So there shouldn't be any security settings in the way re: ports.
-
@jbhines929 (I should also specifiy that this is on a personal, fully open laptop, tried on Windows 11 and on Ubuntu) So there shouldn't be any security settings in the way re: ports.
@jbhines929 Ok I retract the last post. I just tried again and I am able to connect over Microhard/QGC on windows. Ubuntu wasn't working, but seems like Windows is functional. I'll do some more tests. Otherwise, thank you very much for your assistance!
-
@jbhines929 Ok I retract the last post. I just tried again and I am able to connect over Microhard/QGC on windows. Ubuntu wasn't working, but seems like Windows is functional. I'll do some more tests. Otherwise, thank you very much for your assistance!
-
@jbhines929 Ok I retract the last post. I just tried again and I am able to connect over Microhard/QGC on windows. Ubuntu wasn't working, but seems like Windows is functional. I'll do some more tests. Otherwise, thank you very much for your assistance!
@jbhines929 I was able to do a test flight, however in Position mode it won't hold gps position (even though I have good # satellites). I wonder if this is something due to the optical flow and VOXL?
-
@jbhines929 I was able to do a test flight, however in Position mode it won't hold gps position (even though I have good # satellites). I wonder if this is something due to the optical flow and VOXL?
@jbhines929 Hmm I would make sure you have the correct px4 parameter set loaded on your flight core, i.e. "outdoor_gps.params" from https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/blob/master/params/v1.14/EKF2_helpers/outdoor_gps.params?ref_type=heads
-
@jbhines929 Hmm I would make sure you have the correct px4 parameter set loaded on your flight core, i.e. "outdoor_gps.params" from https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/blob/master/params/v1.14/EKF2_helpers/outdoor_gps.params?ref_type=heads
@tom Thank you very much for all your help on this. I ended up getting it to work, not sure why it wasnt on Ubuntu earlier. Probably user error!
")
Honestly, got to our wits end with it and a colleague ended up blasting the PX4 firmware and putting Arducopter on it. Seems to be working fine now, with VOXL apparently just handling sending packets to the microhard. I really appreciate your support and answering my questions, they were most helpful.
-
@tom Thank you very much for all your help on this. I ended up getting it to work, not sure why it wasnt on Ubuntu earlier. Probably user error!
Honestly, got to our wits end with it and a colleague ended up blasting the PX4 firmware and putting Arducopter on it. Seems to be working fine now, with VOXL apparently just handling sending packets to the microhard. I really appreciate your support and answering my questions, they were most helpful.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login