Stereo Cameras are highly inaccurate
-
I calibrated my stereo cameras twice according to these instructions. https://docs.modalai.com/calibrate-cameras/#calibrate-stereo-cameras. However, the output I receive from running
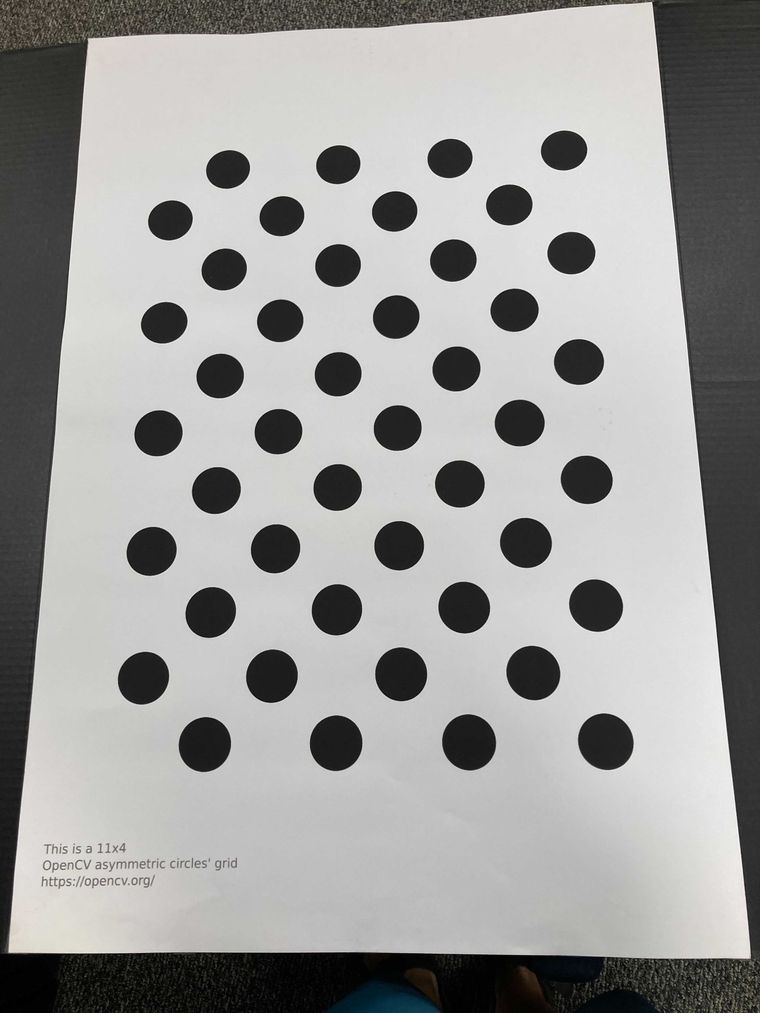
voxl-vision-px4 -sis very inaccurate. How can I improve the stereo camera's object detection accuracy? I used a 4x11 acircles board with 59.5 mm distance separating each circle.
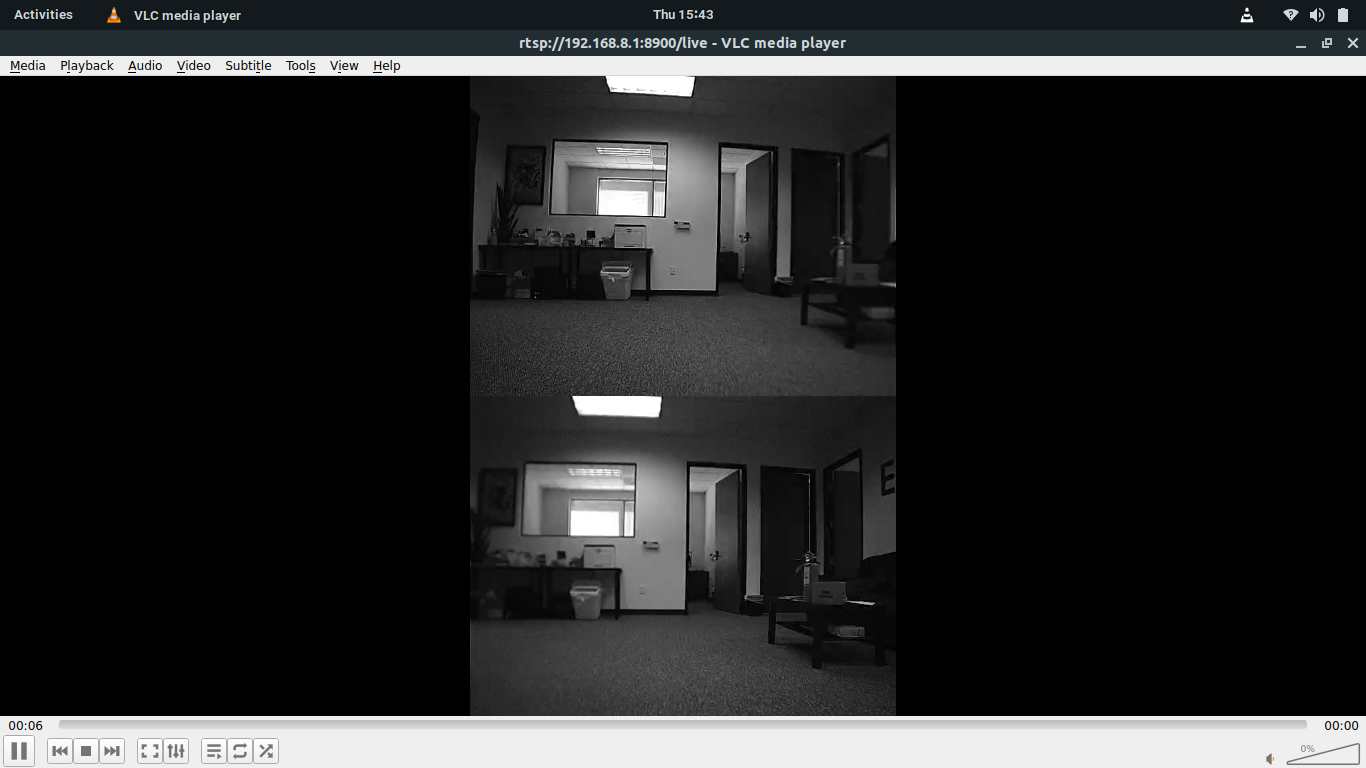
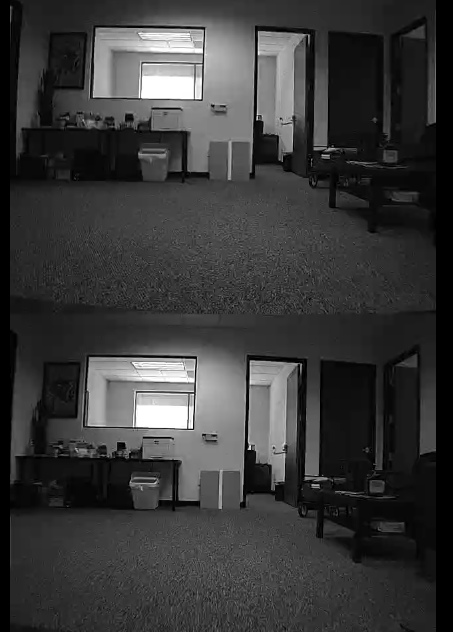
Testing environment
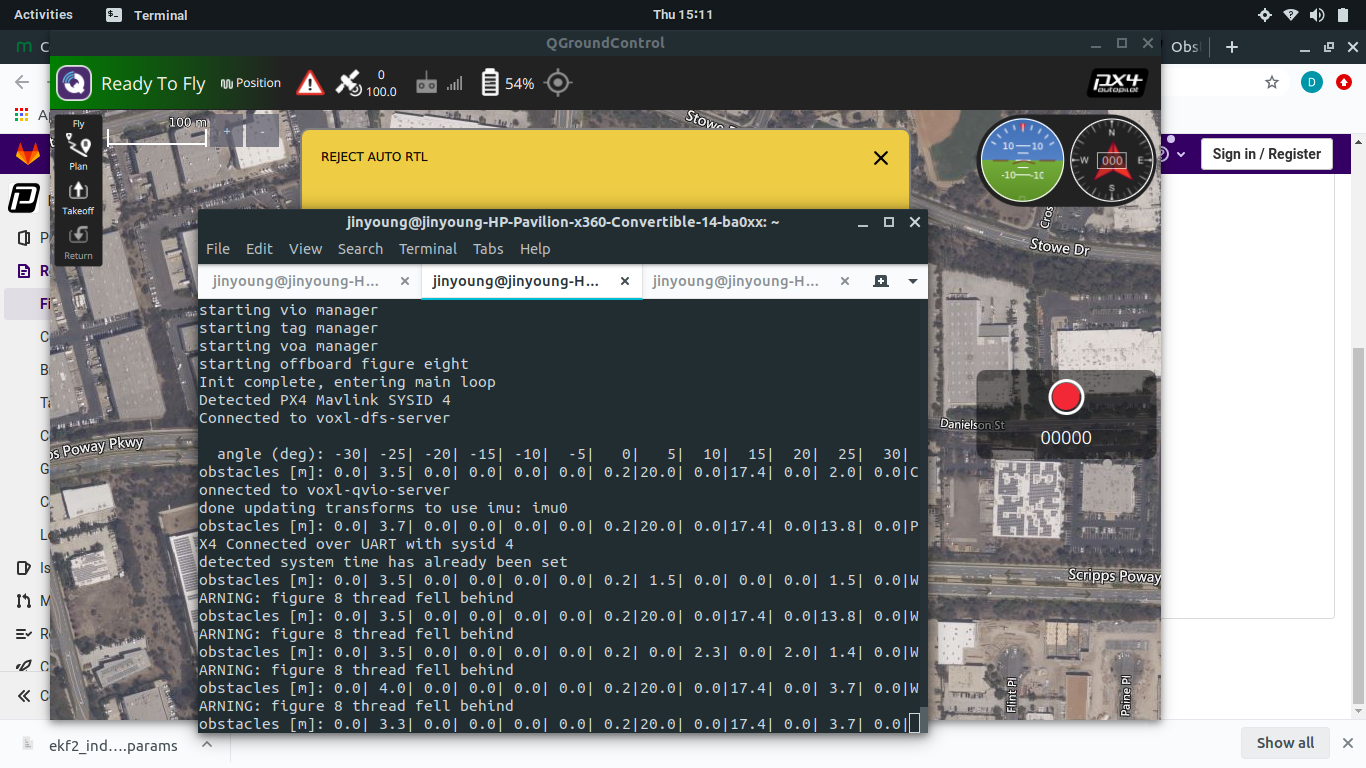
First calibration results
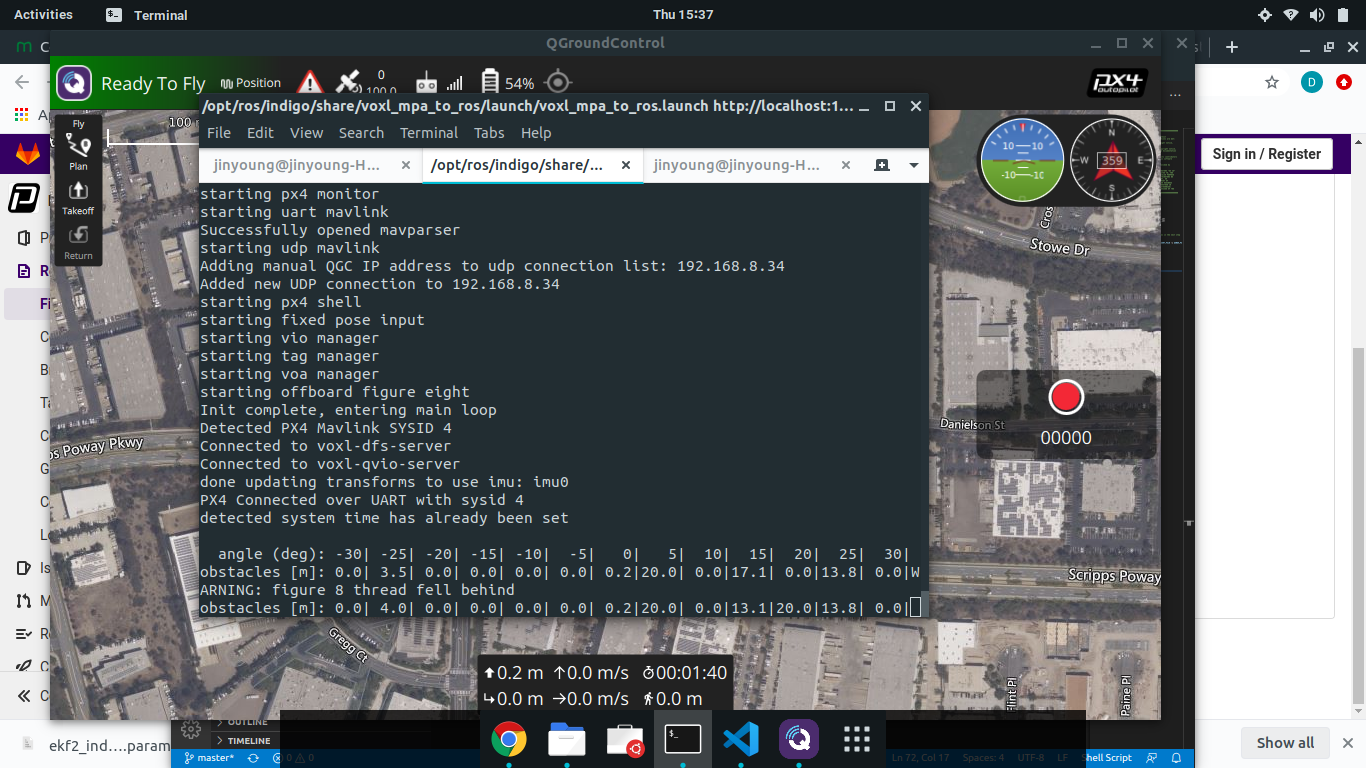
Second calibration results
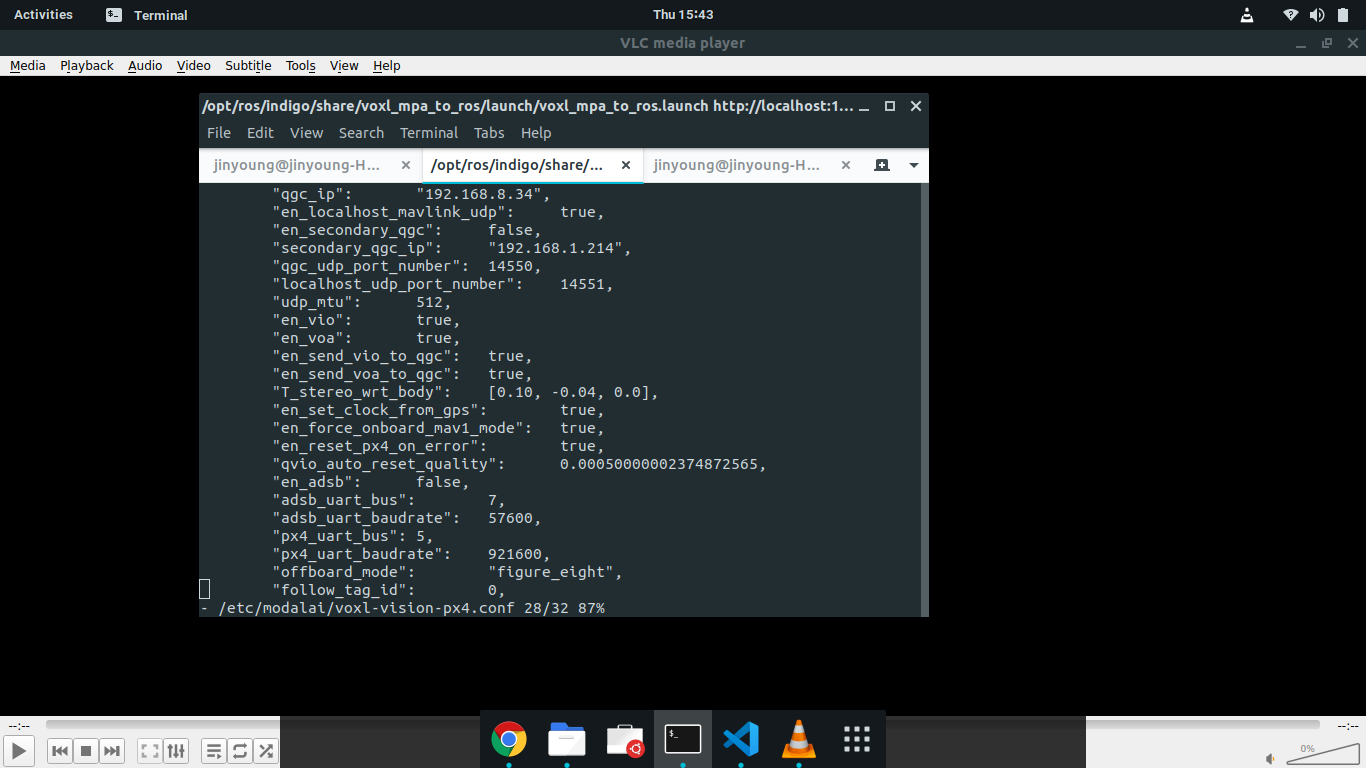
voxl-vision-px4.conf
-
Clarifying notes:
Same problem seen on another m500 drone.
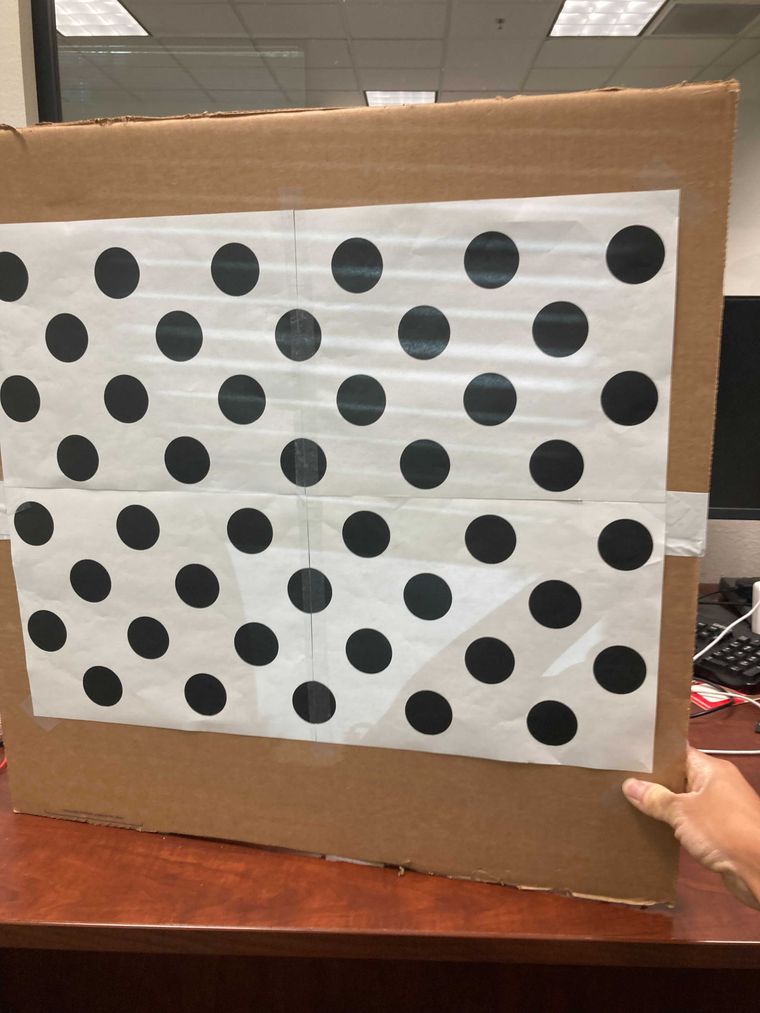
Calibration card used has a spacing of 98.8 mm between the center of each circles (acircles card). 4x11 -
-
you need to get the calibration target professionally printed. All of those inaccuracies in what you have put together are going to create issues with calibration. Any office printing place can print a card like that from PDF on stiff backing. I don't think what you have is going to work that well
-
you need to get the calibration target professionally printed. All of those inaccuracies in what you have put together are going to create issues with calibration. Any office printing place can print a card like that from PDF on stiff backing. I don't think what you have is going to work that well
@Chad-Sweet I'll try again with a card professionally printed card and get back to you
-
you need to get the calibration target professionally printed. All of those inaccuracies in what you have put together are going to create issues with calibration. Any office printing place can print a card like that from PDF on stiff backing. I don't think what you have is going to work that well
@Chad-Sweet Here are the results with the pictured calibration board we used (spacing 117.5 mm center to center). As you can see, we still have a detection at 0 degrees at 0.2 meters, when there should be nothing at all.

-
Note: Every other angle appears to be somewhat accurate, everything except the measurements at 0 degrees
-
An update on our efforts in this regard.
We have now attempted to calibrate 4 different VOXLs. In one case, we calibrated the VOXL board twice (with similar results).
We have tried with three different circles grids (two of which were professionally printed).
In all cases, at the zero degree angle, there is an obstacle constantly detected at 0.2 meters. We do not know why this is. We presume this is a problem. Is it? If not, why?
In three of the four cases, the detections at all other angles are inaccurate. In these three cases, in general, they "sense" when an obstacle is within their bin range, but this is not always the cause: sometimes miss detecting obstacles. In the three cases where the detection are inaccurate, they can be off by several meters. We expect that autonomous navigation that relies on the output of these bins would cause problems. Do you have any additional guidance on how to get this working more accurately?
-
This looks like it could be a bug, we're looking into it. In the meantime you can just comment out using the center bin
-
A potential fix for this has been pushed to the dev branch
-
A potential fix for this has been pushed to the dev branch
@Chad-Sweet The fix in the dev branch successfully populates the 0th degree bin for obstacle detection. We are now able to run VOA mostly successfully, with one observable bug with the voxl-camera-server/voxl-dfs-server. Please see this post for details: https://forum.modalai.com/topic/450/intermittent-crashing-of-voxl-camera-server-during-voa-testing?_=1631837674205
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login