M0117 ESC rough control
-
@Alex-Kushleyev Additionally,
Few stats from our motor : Our motor at hover time consumes 7.6 Amp and motor's peak current is at 18A. Current eventually increases as battery voltage decreases pushing hover current to 11A per motor.
Can this requirements be met with VOXL ESC 4-in-1 as linked above?
@Aaky , what is the voltage? 4S or 6S?
M0117 s M0134 escs can handle more than 10A continuous but with proper cooling. It has to be tested in your conditions to be sure. Monitor the esc temperature and stop the test immediately if esc temp gets above 100-110 C. Ideally, esc should be in the 50-80C range.
If you have an M01117 already, you could use that for testing if voltage is 4s or lower.
Also it seems your motor power may be a bit insufficient, if at hover you could have 11A at low battery, but absolute max current is 18A (i assume charged battery). The motor may be operating with little margin (low thrust to weight ratio of the drone). Please check!
-
@Aaky , what is the voltage? 4S or 6S?
M0117 s M0134 escs can handle more than 10A continuous but with proper cooling. It has to be tested in your conditions to be sure. Monitor the esc temperature and stop the test immediately if esc temp gets above 100-110 C. Ideally, esc should be in the 50-80C range.
If you have an M01117 already, you could use that for testing if voltage is 4s or lower.
Also it seems your motor power may be a bit insufficient, if at hover you could have 11A at low battery, but absolute max current is 18A (i assume charged battery). The motor may be operating with little margin (low thrust to weight ratio of the drone). Please check!
Honestly, if you are building an fast quadrotor (fpv or similar) i would suggest using our FPV ESC, but if you want to give your M0117 a try, i can help you evaluate it and make sure it does not overheat during flight (the ESC temperature is reported from each ESC channel to PX4 and we also have optional warnings you can set if ESC temperature is too high / close to overheating).
-
Honestly, if you are building an fast quadrotor (fpv or similar) i would suggest using our FPV ESC, but if you want to give your M0117 a try, i can help you evaluate it and make sure it does not overheat during flight (the ESC temperature is reported from each ESC channel to PX4 and we also have optional warnings you can set if ESC temperature is too high / close to overheating).
@Alex-Kushleyev Our voltage is 4S, compatible with M0117 but the challenge is in our design its extremely difficult to provide direct airflow to the ESC. So my worry is for 10+ Amp of continous current needs will ESC be able to provide that much. Also we are building a aircraft which is under 3 kg category and not an FPV for sure but at the same time we want it to fly in outdoor and indoor situations. We are using 10-11 inch propeller and aircraft diameter is around 55 cms. We want it to fly fast for sure due to customer needs.
-
@Alex-Kushleyev Our voltage is 4S, compatible with M0117 but the challenge is in our design its extremely difficult to provide direct airflow to the ESC. So my worry is for 10+ Amp of continous current needs will ESC be able to provide that much. Also we are building a aircraft which is under 3 kg category and not an FPV for sure but at the same time we want it to fly in outdoor and indoor situations. We are using 10-11 inch propeller and aircraft diameter is around 55 cms. We want it to fly fast for sure due to customer needs.
@Aaky , If there is any doubt, you should just go with the FPV ESC, which is currently our highest performing ESC (in terms of current capacity). The FPV ESC also includes power regulator for VOXL2, so you would not need the APM.
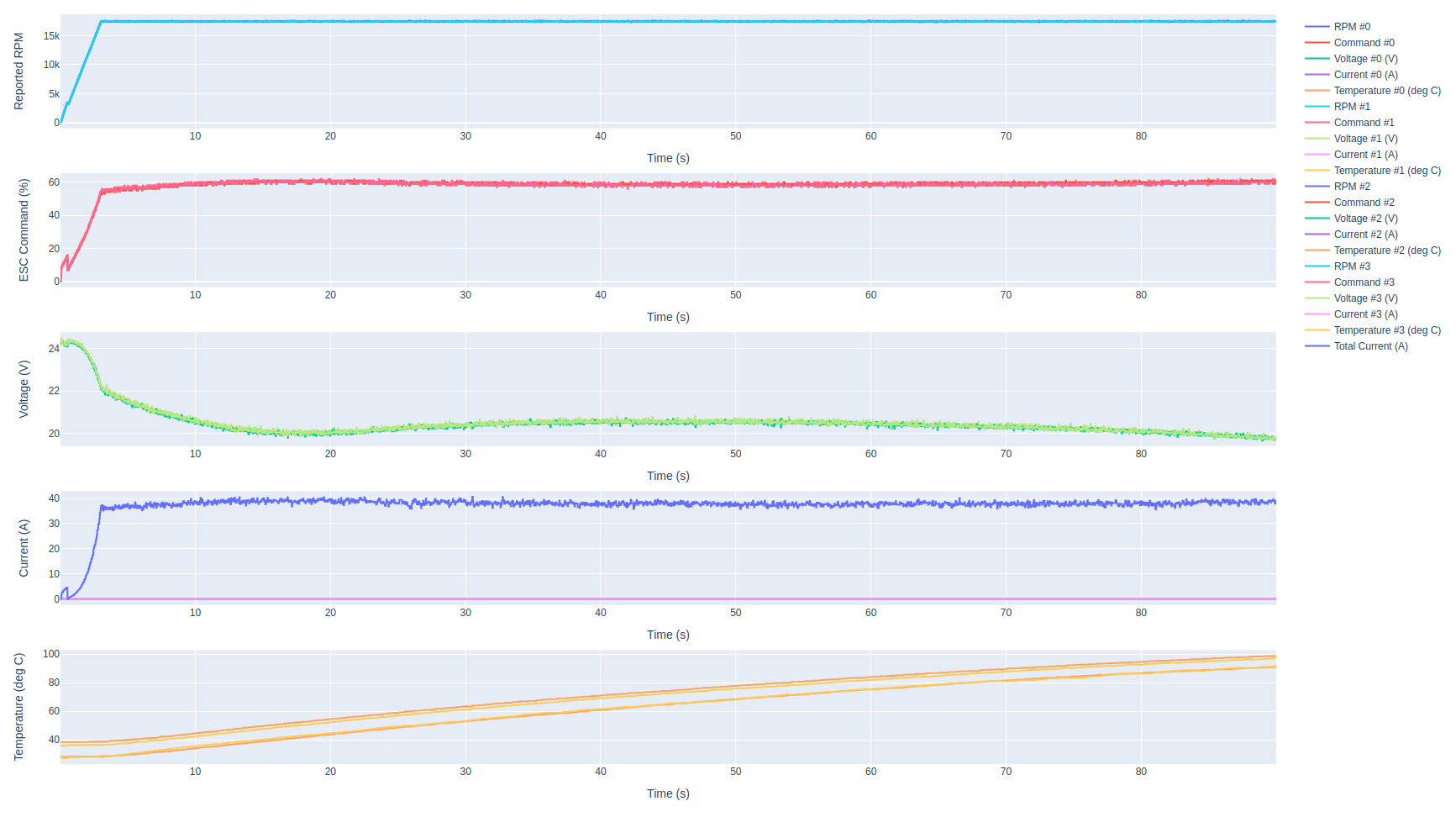
I actually have a plot from a test we did using the FPV ESC. The test was run 4 motors about 9-10A each (39A total) for 90 seconds with ZERO cooling. What I mean by zero cooling, the ESC was placed 1 meter away from the motors behind a closed door to ensure there was absolutely no airflow coming from the propellers. So the ESC could only sink heat via motor wires and by radiation. This is a very tough test condition for the ESC. Ambient temperature was about 20C, which is not too high.
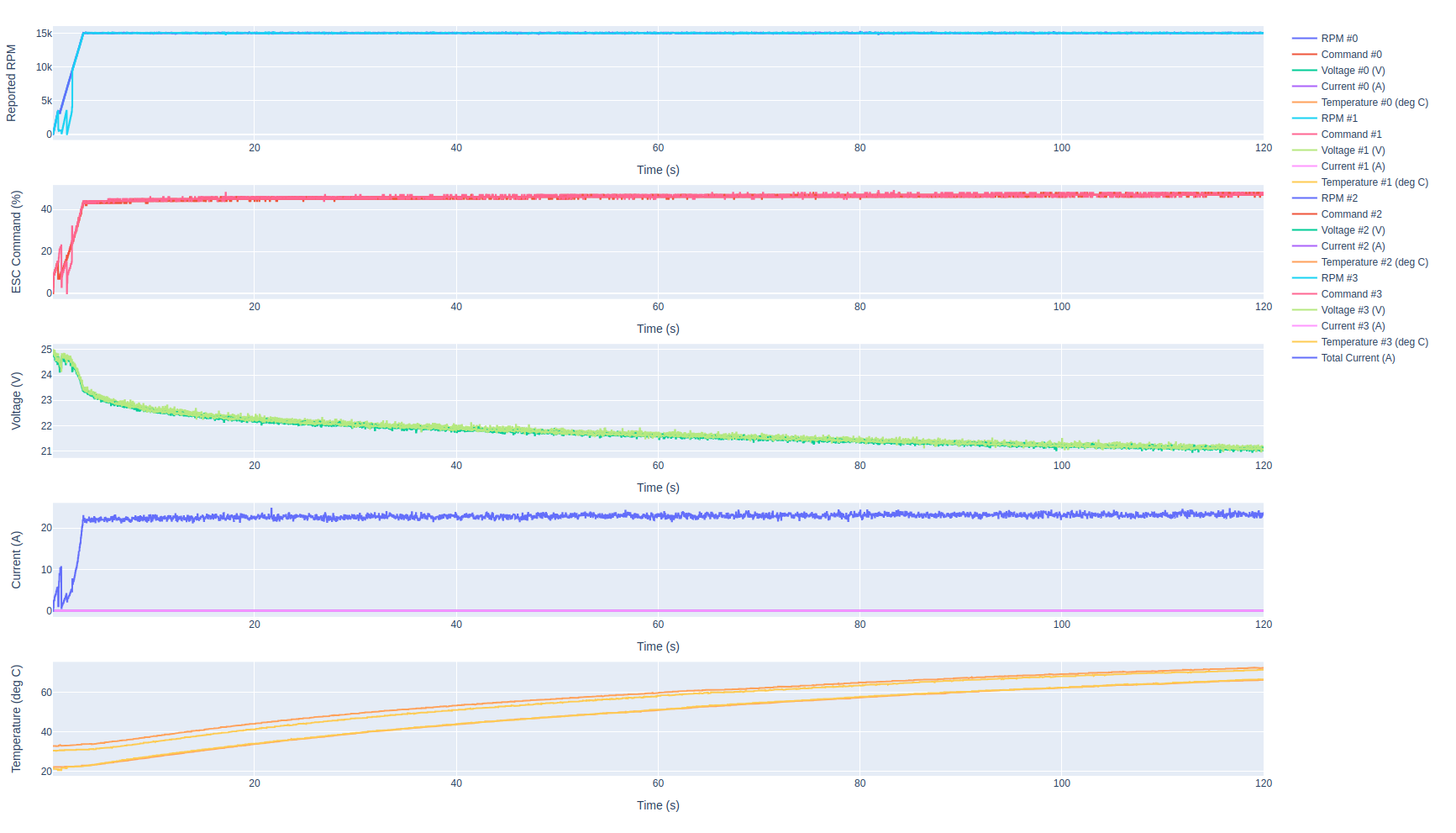
Please note in temperature plot, there are two sets of temperature (bands). This is because two of the reported temperatures are coming from temperature sensors inside MCU (which show higher temp) and two temperatures are measured by dedicated temperature sensors next to mosfets (which show lower temp). MCU runs a little bit hotter because it generates internal heat by itself inside its package.
90 sec, 39A, no cooling. temperature reached 91-98C
another test: 120 sec, 23A total, no cooling. Temperature reached 66-72C
So the first test is actually very close to your scenario, except it is using 6S battery. With 4S, the amount of heat will be much lower, because the heat in ESC is not linear with voltage (but worse, maybe quadratic). You can understand, that if you do not provide any cooling, the heat has nowhere to go and temperature will rise. The FPV ESC also has a larger PCB and more copper (compared to other ESCs), so it will take longer for temperature to rise.
Even in the worse case scenario that you still need to cool down the ESC, you could make a heat spreader, which should help.
One final note, i should add that the FPV ESC only has total current sensing, not individual ESC channel, like M0117 or M0134.
Alex
-
@Aaky , If there is any doubt, you should just go with the FPV ESC, which is currently our highest performing ESC (in terms of current capacity). The FPV ESC also includes power regulator for VOXL2, so you would not need the APM.
I actually have a plot from a test we did using the FPV ESC. The test was run 4 motors about 9-10A each (39A total) for 90 seconds with ZERO cooling. What I mean by zero cooling, the ESC was placed 1 meter away from the motors behind a closed door to ensure there was absolutely no airflow coming from the propellers. So the ESC could only sink heat via motor wires and by radiation. This is a very tough test condition for the ESC. Ambient temperature was about 20C, which is not too high.
Please note in temperature plot, there are two sets of temperature (bands). This is because two of the reported temperatures are coming from temperature sensors inside MCU (which show higher temp) and two temperatures are measured by dedicated temperature sensors next to mosfets (which show lower temp). MCU runs a little bit hotter because it generates internal heat by itself inside its package.
90 sec, 39A, no cooling. temperature reached 91-98C
another test: 120 sec, 23A total, no cooling. Temperature reached 66-72C
So the first test is actually very close to your scenario, except it is using 6S battery. With 4S, the amount of heat will be much lower, because the heat in ESC is not linear with voltage (but worse, maybe quadratic). You can understand, that if you do not provide any cooling, the heat has nowhere to go and temperature will rise. The FPV ESC also has a larger PCB and more copper (compared to other ESCs), so it will take longer for temperature to rise.
Even in the worse case scenario that you still need to cool down the ESC, you could make a heat spreader, which should help.
One final note, i should add that the FPV ESC only has total current sensing, not individual ESC channel, like M0117 or M0134.
Alex
-
@Alex-Kushleyev Noted Alex. Thanks for all the details. I have time constraints at the moment to procure and then deploy FPV ESC on our UAV so was trying to see if anything which is available with me can suffice the needs.
@Alex-Kushleyev One quick query on VOXL2 IO board, According to this diagram is there a inverter present on VOXL2 IO board for S.BUS port? Say I have non inverted S.BUS packets coming to input of VOXL2 IO J3, will they be inverted by VOXL2 IO board?
-
@Alex-Kushleyev One quick query on VOXL2 IO board, According to this diagram is there a inverter present on VOXL2 IO board for S.BUS port? Say I have non inverted S.BUS packets coming to input of VOXL2 IO J3, will they be inverted by VOXL2 IO board?
More details about my setup, I am trying to send S.BUS signals from my Transmitter via Doodle labs serial port and on UAV side, receiving the serial packets from Doodle labs modem and then feeding them into VOXL2 IO board. I do not have inverter for converting inverted UART to normal UART on Doodle labs with GCS side which I am planning to insert but will I need inverter for back converting normal UART to inverted UART on UAV side before feeding into VOXL2 IO or not is the question.
-
More details about my setup, I am trying to send S.BUS signals from my Transmitter via Doodle labs serial port and on UAV side, receiving the serial packets from Doodle labs modem and then feeding them into VOXL2 IO board. I do not have inverter for converting inverted UART to normal UART on Doodle labs with GCS side which I am planning to insert but will I need inverter for back converting normal UART to inverted UART on UAV side before feeding into VOXL2 IO or not is the question.
@Aaky, as the diagram shows, there is a hardware buffer/inverter present in voxl2_io board on the sbus input port.
J2 port (designated as spektrum input) on voxl2_io does not have the inverter and is currently unused. I could set up this port as non-inverted sbus input that will work just like the inverted one.
If you want to use the current sbus input port, you will need to invert the signal and also use parity bit in each byte (sbus standard)
-
@Aaky, as the diagram shows, there is a hardware buffer/inverter present in voxl2_io board on the sbus input port.
J2 port (designated as spektrum input) on voxl2_io does not have the inverter and is currently unused. I could set up this port as non-inverted sbus input that will work just like the inverted one.
If you want to use the current sbus input port, you will need to invert the signal and also use parity bit in each byte (sbus standard)
-
@Alex-Kushleyev Thanks for the inputs.
Can you set J2 as non inverted please? Can I use it directly with my non inverted Sbus packets then?@Aaky , yes it should work with non-inverted uart. You would need to send the following uart format in order to be compatible with sbus : Even parity, 2 stop bits, 100,000 baud. Are you able to do that from your doodle labs device?
-
@Aaky , yes it should work with non-inverted uart. You would need to send the following uart format in order to be compatible with sbus : Even parity, 2 stop bits, 100,000 baud. Are you able to do that from your doodle labs device?
Also, if you are sending standard uart RC data from doodle labs, you could just feed that directly into voxl2 J18 or J19 and use standard px4 sbus rc driver. That may be the best option and you bypass voxl2_io for more flexibility.
-
Also, if you are sending standard uart RC data from doodle labs, you could just feed that directly into voxl2 J18 or J19 and use standard px4 sbus rc driver. That may be the best option and you bypass voxl2_io for more flexibility.
-
@Alex-Kushleyev Integrating on J18/J19 seems to be viable option to me. I will try the same and let you know.
@Alex-Kushleyev One more query. Do you have experience with this, say I need to send S.BUS via UART, would only using a inverter circuit in between would work to send S.BUS via UART port of Doodle labs? Considering I set even parity and 2 stop bits on UART settings of Doodle modem.
Another query, Can SBUS RC driver on J18/J19 work other then 100000 baud rate? Like UART standard 115200?
-
@Alex-Kushleyev One more query. Do you have experience with this, say I need to send S.BUS via UART, would only using a inverter circuit in between would work to send S.BUS via UART port of Doodle labs? Considering I set even parity and 2 stop bits on UART settings of Doodle modem.
Another query, Can SBUS RC driver on J18/J19 work other then 100000 baud rate? Like UART standard 115200?
@Aaky , I just checked, if you use VOXL2 J18 or J19, the UART ports on these connectors are connected to the DSP and it does not currently support baud rate 100,000.
So, if you wanted to send the data in SBUS format directly to VOXL2 J18, J19, the requirements would be:
- use standard baud rate, such as 9600, 38400, 57600, 115200, 230400, 460800, 921600, 1000000, 2000000 (all of these are supported by the DSP). Additionally, non-standard supported baud rates are : 250,000, 420,000.
- use 1N8 serial port frame type (1 stop bit, 8 data bits, no parity)
- non-inverted (standard) signal levels (idle = high, 1 =high, 0 = low)
However, i just checked, there is no SBUS RC driver that is currently supported to run on the VOXL2 DSP. This is because the SBUS is typically inverted signal and it is not possible to handle that in VOXL2 directly.
If you are flexible and able to send the data in the format of Ghost RC or Spektrum, they are both supported directly on the DSP : https://github.com/modalai/px4-firmware/tree/voxl-dev/boards/modalai/voxl2-slpi/src/drivers and you can enable them using
/etc/modalai/voxl-px4.confand/usr/bin/voxl-px4-start(check both files for details)Alex
-
@Aaky , I just checked, if you use VOXL2 J18 or J19, the UART ports on these connectors are connected to the DSP and it does not currently support baud rate 100,000.
So, if you wanted to send the data in SBUS format directly to VOXL2 J18, J19, the requirements would be:
- use standard baud rate, such as 9600, 38400, 57600, 115200, 230400, 460800, 921600, 1000000, 2000000 (all of these are supported by the DSP). Additionally, non-standard supported baud rates are : 250,000, 420,000.
- use 1N8 serial port frame type (1 stop bit, 8 data bits, no parity)
- non-inverted (standard) signal levels (idle = high, 1 =high, 0 = low)
However, i just checked, there is no SBUS RC driver that is currently supported to run on the VOXL2 DSP. This is because the SBUS is typically inverted signal and it is not possible to handle that in VOXL2 directly.
If you are flexible and able to send the data in the format of Ghost RC or Spektrum, they are both supported directly on the DSP : https://github.com/modalai/px4-firmware/tree/voxl-dev/boards/modalai/voxl2-slpi/src/drivers and you can enable them using
/etc/modalai/voxl-px4.confand/usr/bin/voxl-px4-start(check both files for details)Alex
@Alex-Kushleyev Got it thanks for the information. So it seems unlikely for me to use J18/J19 for RC input since I dont have much flexibility to convert SBUS into Ghost RC or spektrum format right now.
Say I want to use J2 on VOXL2 IO for non-inverted SBUS packets as you mentioned earlier, is that readily possible or we have to do any changes in SW configuration/firmware of VOXL2 IO? -
@Alex-Kushleyev Got it thanks for the information. So it seems unlikely for me to use J18/J19 for RC input since I dont have much flexibility to convert SBUS into Ghost RC or spektrum format right now.
Say I want to use J2 on VOXL2 IO for non-inverted SBUS packets as you mentioned earlier, is that readily possible or we have to do any changes in SW configuration/firmware of VOXL2 IO?@Aaky , sure, I can look into it. Can you please check if your Doodle labs serial port can generate the UART frame format that SBUS uses:
- 100,000 bps
- 2 stop bits
- 1 parity bit
If we do not follow this format, it will not be a standard protocol and does not make sense for us to make this change for a specific use case.
Alex
-
@Aaky , sure, I can look into it. Can you please check if your Doodle labs serial port can generate the UART frame format that SBUS uses:
- 100,000 bps
- 2 stop bits
- 1 parity bit
If we do not follow this format, it will not be a standard protocol and does not make sense for us to make this change for a specific use case.
Alex
@Alex-Kushleyev I am checking with Doodle labs for this serial port settings. Actually baud rate isn't standard so I doubt 100000 would be supported. Apart from that parity and stop bits is fine. So if only standard baud rate support like 115200 is added might still work out for me.
-
@Alex-Kushleyev I am checking with Doodle labs for this serial port settings. Actually baud rate isn't standard so I doubt 100000 would be supported. Apart from that parity and stop bits is fine. So if only standard baud rate support like 115200 is added might still work out for me.
@Aaky , i am thinking that perhaps the easiest thing to try would be the signal inverter like you originally proposed (between Doodle Labs and M0065 J3). Then there would be no firmware required. Ideally, the signal inverter should be symmetric (for better noise immunity). If you use the single transistor approach, you should put the inverter as close as possible to the receiving end of the signal, otherwise if the wire is long, the output of the inverter will pick up noise due to high impedance of the pull-up resistor (10K) when in "high" state.
But if you cannot output 100K baud rate, that would be a problem.
Alternatively, i think you should re-consider converting the SBUS packet in to GHST or Spektrum packet. If you share mode details how Doodle Labs device is getting the RC data (where is it coming from and in what format), I can make a suggestion how to do this. Then you can just use a standard baud rate and standard driver already supported in PX4 with no hardware changes.
I am hesitant to make changes in M0065 firmware to support your specific use case because maintaining that in the future will be an issue. So lets try to find a workaround.
Alex
-
@Aaky , i am thinking that perhaps the easiest thing to try would be the signal inverter like you originally proposed (between Doodle Labs and M0065 J3). Then there would be no firmware required. Ideally, the signal inverter should be symmetric (for better noise immunity). If you use the single transistor approach, you should put the inverter as close as possible to the receiving end of the signal, otherwise if the wire is long, the output of the inverter will pick up noise due to high impedance of the pull-up resistor (10K) when in "high" state.
But if you cannot output 100K baud rate, that would be a problem.
Alternatively, i think you should re-consider converting the SBUS packet in to GHST or Spektrum packet. If you share mode details how Doodle Labs device is getting the RC data (where is it coming from and in what format), I can make a suggestion how to do this. Then you can just use a standard baud rate and standard driver already supported in PX4 with no hardware changes.
I am hesitant to make changes in M0065 firmware to support your specific use case because maintaining that in the future will be an issue. So lets try to find a workaround.
Alex
@Alex-Kushleyev Thanks for inputs Alex.
I am thinking now as follows.
- My RC transmitter is smart android tablet with radio sticks inbuilt and has port to output SBUS data. I connected this SBUS data out and received it into Teensy 3.2 development board which is AVR microcontroller based small board.
- Now that I have decoded successfully the sbus data into Teensy, I am transmitting this data from teensy into Doodle labs serial port with normal UART setup and 115200 baud rate. My whole intention behind this activity is to route my radio telemetry via Doodle labs modem as physical interface.
- Now the doodle labs modem on GCS side will beam this serial data via UDP socket to UAV side modem and via UAV side Doodle labs modem I would get the normal UART SBUS packets out.
Now their are multiple solutions,
- This normal UART SBUS data I can either send directly into VOXL2 IO board (if possible) via J2 port with agreed upon frame format?
- I get another Teensy microcontroller which would receive normal UART data convert it into SBUS format and output the same to VOXL2 IO J3 port. I am not sure if Teensy can output inverted SBUS tough.
Note : Doodle cant decode 100000 baud rate packets and also inverted ones so direct SBUS packets into Doodle labs modem arent going to work for sure.
My main confusion is SBUS data is having multiple hops in between before it gets to PX4 and amount of latency which I would be introducing is something I dont know.
In solution 1, I am saving one more hop.
Solution 2 looks more clean.Let me know your thoughts and any background experience.
-
@Alex-Kushleyev Thanks for inputs Alex.
I am thinking now as follows.
- My RC transmitter is smart android tablet with radio sticks inbuilt and has port to output SBUS data. I connected this SBUS data out and received it into Teensy 3.2 development board which is AVR microcontroller based small board.
- Now that I have decoded successfully the sbus data into Teensy, I am transmitting this data from teensy into Doodle labs serial port with normal UART setup and 115200 baud rate. My whole intention behind this activity is to route my radio telemetry via Doodle labs modem as physical interface.
- Now the doodle labs modem on GCS side will beam this serial data via UDP socket to UAV side modem and via UAV side Doodle labs modem I would get the normal UART SBUS packets out.
Now their are multiple solutions,
- This normal UART SBUS data I can either send directly into VOXL2 IO board (if possible) via J2 port with agreed upon frame format?
- I get another Teensy microcontroller which would receive normal UART data convert it into SBUS format and output the same to VOXL2 IO J3 port. I am not sure if Teensy can output inverted SBUS tough.
Note : Doodle cant decode 100000 baud rate packets and also inverted ones so direct SBUS packets into Doodle labs modem arent going to work for sure.
My main confusion is SBUS data is having multiple hops in between before it gets to PX4 and amount of latency which I would be introducing is something I dont know.
In solution 1, I am saving one more hop.
Solution 2 looks more clean.Let me know your thoughts and any background experience.
@Alex-Kushleyev Even I can consider converting Sbus into GHST/Spectrum packet on GCS side Teensy itself. Teensy is Arduino style board and if we have good direct libraries to do this it would be beneficial. Let me know if with Arduino style board this can be achieved as an alternative since Sbus packets are already decoded in Teensy and on UAV side I can output standard UART style packets as RC packets.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login