MAV_1_MODE not changing from Onboard on QGC
-
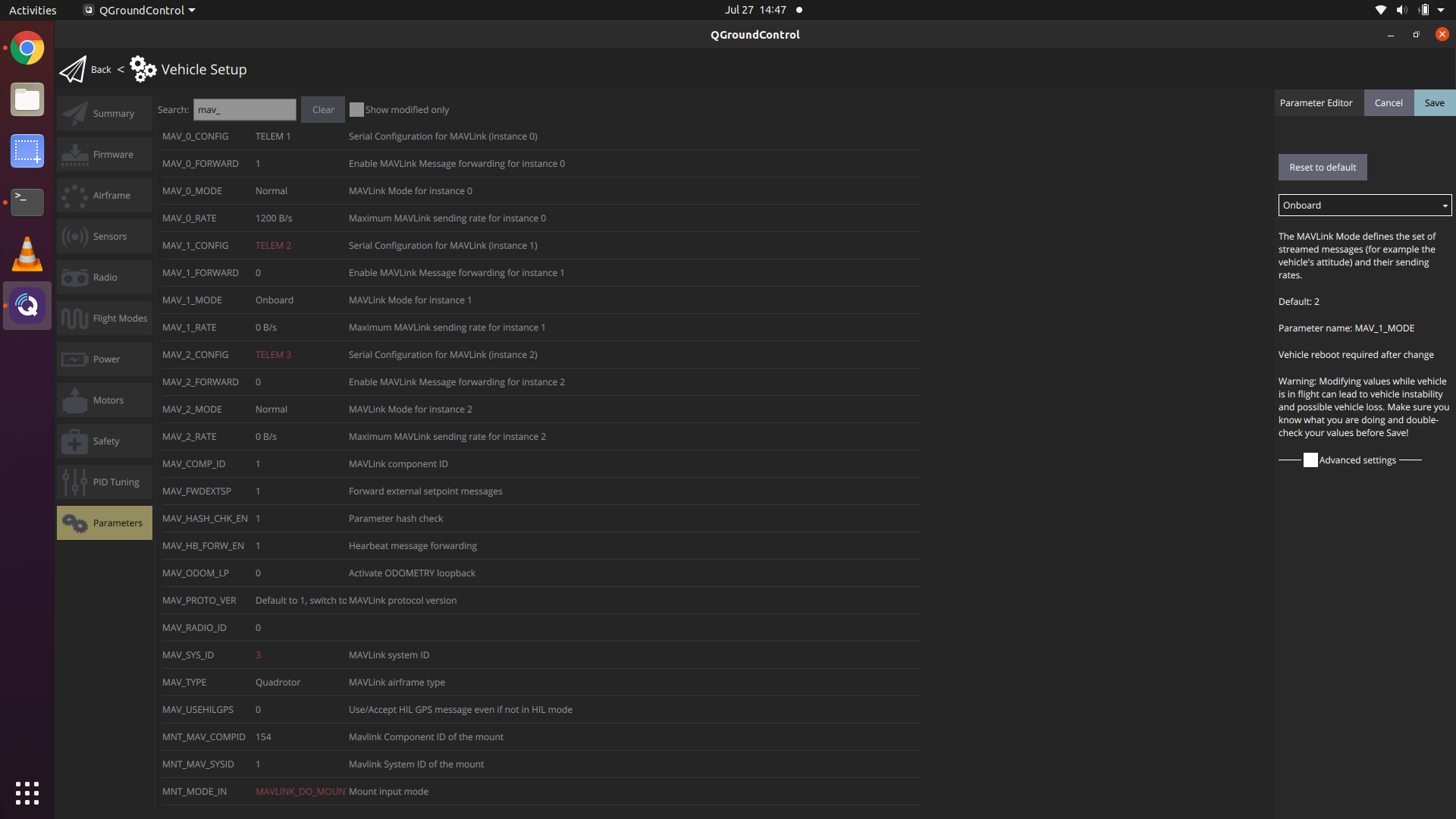
Hello, I am trying to establish a gimbal connection with mavlink according to https://docs.px4.io/master/en/peripherals/mavlink_peripherals.html, and I am trying to change the PX4 parameter MAV_1_Mode from Onboard to Normal. However, every time I try, the QGC immediately switches the mode back to Onboard. Is there a setting preventing this change? Rebooting is not effective.
-
If you have an M500, it contains either a VOXL Flight, and there's an internal UART from the PX4 processor (STM32F7) to the Snapdragon processor running linux.
This is setup on MAV1, and if changed would halt comms between the two systems.
PX4-Autopilot/boards/modalai/fc-v1/init/rc.board_defaults at main · PX4/PX4-Autopilot
PX4 Autopilot Software. Contribute to PX4/PX4-Autopilot development by creating an account on GitHub.

GitHub (github.com)
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login