IMU Noise Expectations
-
Hi there, I'm curious about what sort of noise we should expect on the IMUs on the Starling?
Here is the sort of noise I am seeing on my platform:
-
Result of
voxl-inspect-vibration imu_appsduring a flight:
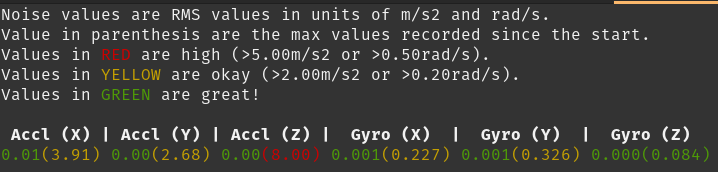
-
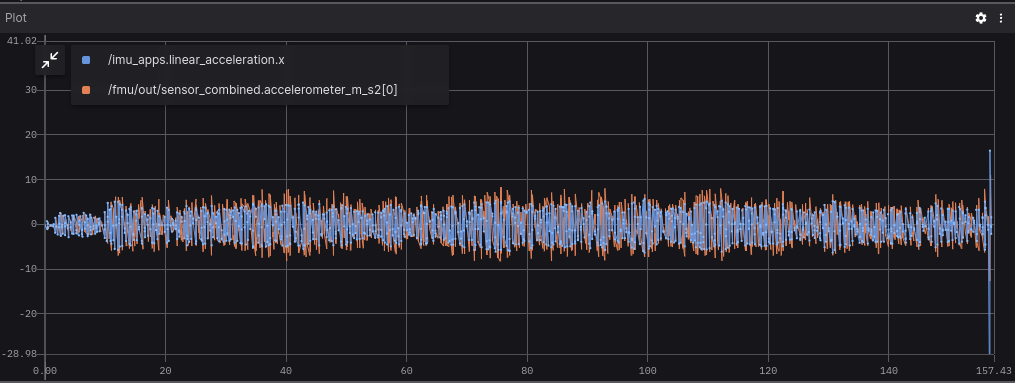
Result of plotting
imu_appsas well asimu_px4. Both have similar levels of noise.
-
-
@Moderator - any guidance here? Wondering if my unit is perhaps defective.
@awoods ,
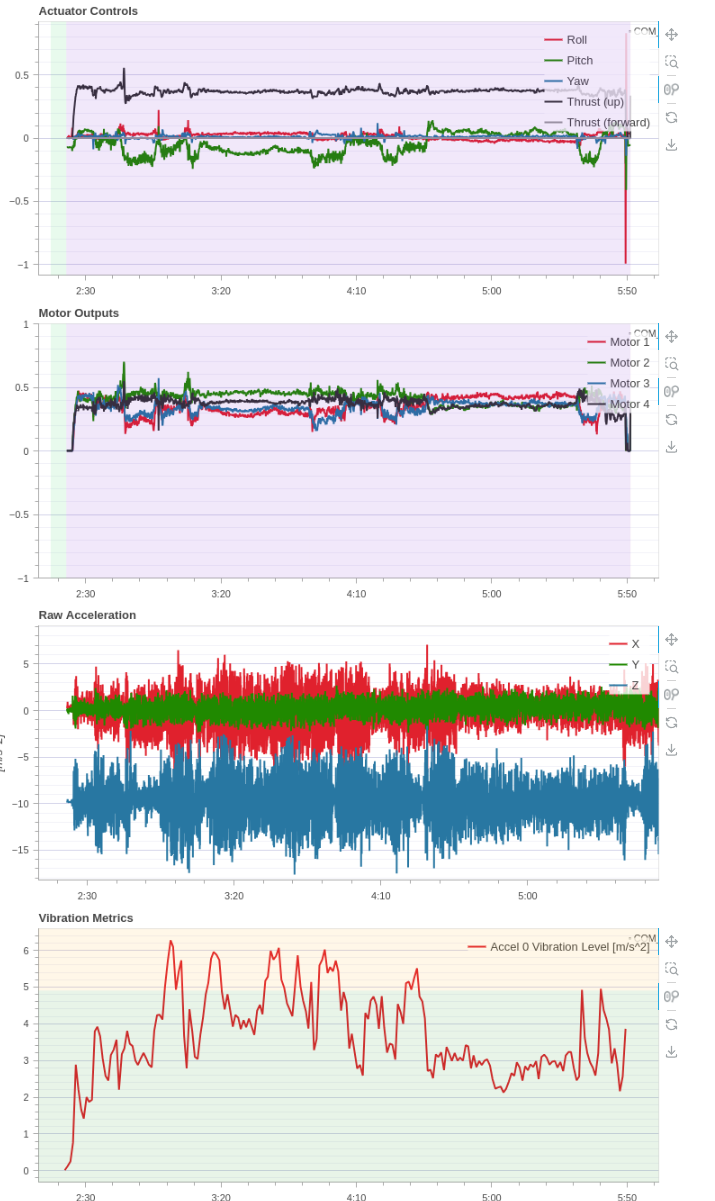
Here is a sample log from one of our recent tests using a Starling platform.
You can review the PX4 log here : https://review.px4.io/plot_app?log=3a4c53fd-db88-4d54-8f2e-5f22e159bfc6
The accelerometer noise looks comparable to yours, perhaps a bit less. The main thing is that motor outputs are pretty clean, very minor oscillations. You can collect a similar log and compare using px4 flight review. Also look at gyro noise which more directly affects motor commands.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login