VIO Quality
-
Hello,
I am trying to get the VIO Quality on the drone below to be higher than 20% when flying. I am using
voxl-inspect-qvioto see the quality in real time while I am moving it manually.
In the beginning when the drone first starts up the quality is good at or around 100%, I can move the drone forward and I see x increasing, move left and y decreases, moving up the z value decreases. Once I start moving the drone the quality drops to 20% and will occasionally restart. I was looking at the documentation post here for troubleshooting VIO issues. I checked the IMU_APPS and saw only green values even when I jostled it a bit. I thought that the light from the lidar that I had behind it was causing some lighting issues so I removed it. Still having the same issue.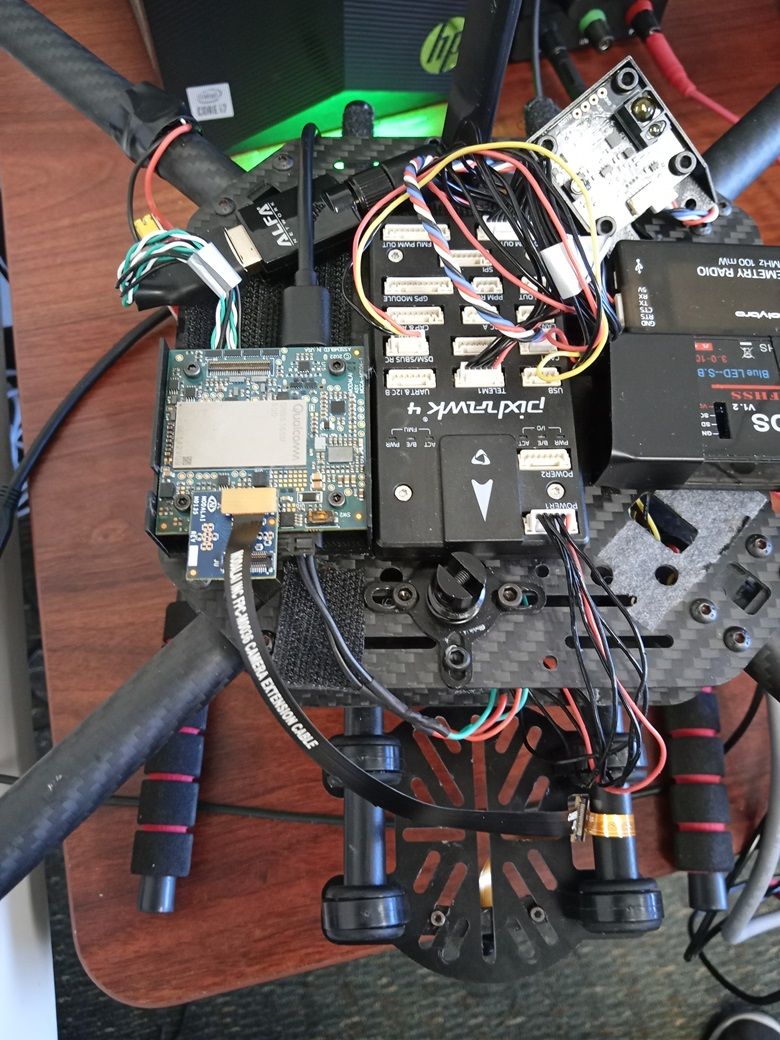

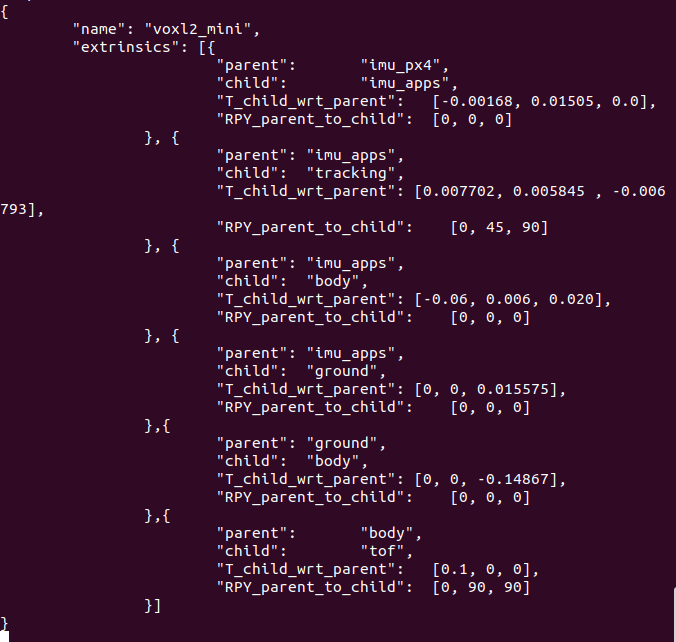
I tried getting the extrinsic file values as close to the correct offset values that I can for the tracking camera. The only thing that I can see that Might be an issue is that the camera is not pointed completely straight. But if that is not the issue then I don't really know what else to look at to fix the quality drop.
Thanks,
-Aaron -
Hello,
I am trying to get the VIO Quality on the drone below to be higher than 20% when flying. I am using
voxl-inspect-qvioto see the quality in real time while I am moving it manually.
In the beginning when the drone first starts up the quality is good at or around 100%, I can move the drone forward and I see x increasing, move left and y decreases, moving up the z value decreases. Once I start moving the drone the quality drops to 20% and will occasionally restart. I was looking at the documentation post here for troubleshooting VIO issues. I checked the IMU_APPS and saw only green values even when I jostled it a bit. I thought that the light from the lidar that I had behind it was causing some lighting issues so I removed it. Still having the same issue.I tried getting the extrinsic file values as close to the correct offset values that I can for the tracking camera. The only thing that I can see that Might be an issue is that the camera is not pointed completely straight. But if that is not the issue then I don't really know what else to look at to fix the quality drop.
Thanks,
-Aaron@Aaron-Porter The tracking sensor does not need to be straight, but the extrinsics need to reflect the accurate position of the sensor relative to the IMU
if you monitor the qvio-overlay in voxl-portal, it's usually obvious what is going on. If you need help interpreting, please post a screen video capture of the qvio-overlay here
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login