@Alex-Kushleyev is there anyway I can hard reset the drone? I think clearing it out and reinstalling might just do the trick
U
utari_ais
@utari_ais
Posts
-
Factory reset Seeker -
Factory reset Seeker@utari_ais I remember doing this. Let me try again.
-
Factory reset Seeker@Alex-Kushleyev Here's what I see. I don't know why its not showing voxl-px4 as a service at all.
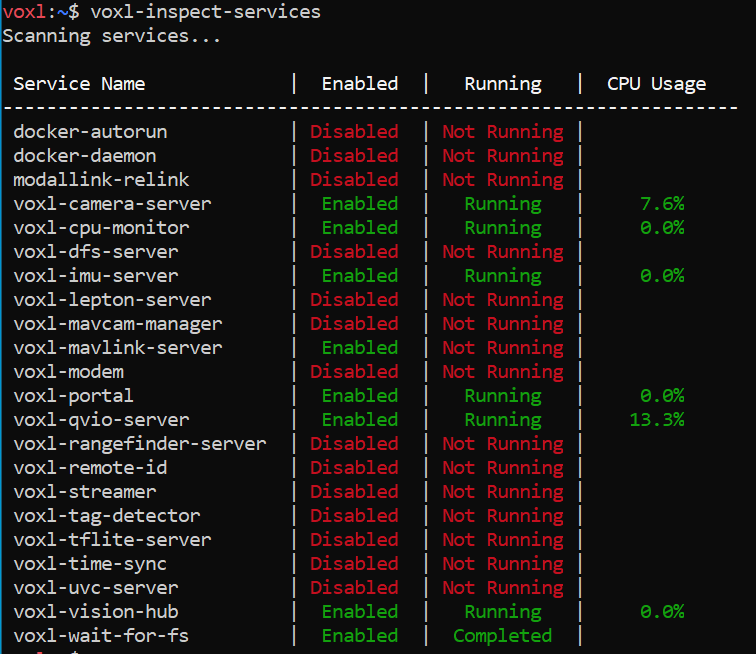
-
Factory reset Seeker@Alex-Kushleyev Nope. I have followed all the steps but nothing happens. QGC still says "Disconnected".
-
Factory reset Seeker@tom I have run into the same problem again. I am using this guide https://docs.modalai.com/qgc-wifi/
I am unable to connect the seeker to QGC. It worked last week, but now its not. I have correctly put the gcp IP setting in voxl-mavlink-server.conf and followed all the steps.
I am also unable to connect the spektrum transmitter to the drone, I always get a bind failed error whenever I try with QGC connected.
Any help is appreciated.
-
Factory reset Seeker@tom is there somewhere I can find the changes, the main documentation isn't updated so it is rather confusing
-
Factory reset Seeker@tom /etc/modalai/voxl-vision-px4.conf
I'm following this guide: https://docs.modalai.com/seeker-user-guide-network/
-
Factory reset Seeker@Alex-Kushleyev Yes I have. For some reason, the px4-config file is always empty (the file that I have to edit the ground station's IP into), this keeps happening with multiple SDKs that I have tried installing
-
Factory reset SeekerI was wondering how I can factory reset the seeker. I have had numerous problems trying to set it up so I just want to start afresh.
Thanks in advance!
-
VOXL MPA to ROS SeekerI'm trying to use rviz to view the pointcloud made by the VOXL cam on seeker. I'm using these instructions: https://docs.modalai.com/voxl-cam-user-guide-core/
I also tried building a ros node from here: https://docs.modalai.com/building-ros-nodes/ (used the mpa_to_ros gitlab)
However, upon running roslaunch voxl_mpa_to_ros voxl_mpa_to_ros.launch, I get this output:
... logging to /home/root/.ros/log/7c7e0f0e-1dda-11b2-a220-18473db1c84b/roslaunch-apq8096-21073.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.started roslaunch server http://192.168.8.1:39686/
SUMMARY
PARAMETERS
- /rosdistro: indigo
- /rosversion: 1.11.21
NODES
/
voxl_mpa_to_ros_node (voxl_mpa_to_ros/voxl_mpa_to_ros_node)auto-starting new master
process[master]: started with pid [21092]
ROS_MASTER_URI=http://192.168.8.1:11311/setting /run_id to 7c7e0f0e-1dda-11b2-a220-18473db1c84b
process[rosout-1]: started with pid [21105]
started core service [/rosout]
process[voxl_mpa_to_ros_node-2]: started with pid [21112]MPA to ROS app is now running
Found new interface: qvio_overlay
Found new interface: stereo
Found new interface: tracking
Found new interface: imu0
Found new interface: imu1
Found new interface: voa_pc_out
Found new interface: qvioWhat am I missing? Thanks in advance!
-
Seeker SLAM Setup Help@tom Installing the VOXL1 SDK now... Thanks!
-
Seeker SLAM Setup Help@tom Yes, I'm using a seeker. Okay, how can I safely exit from this installation?
-
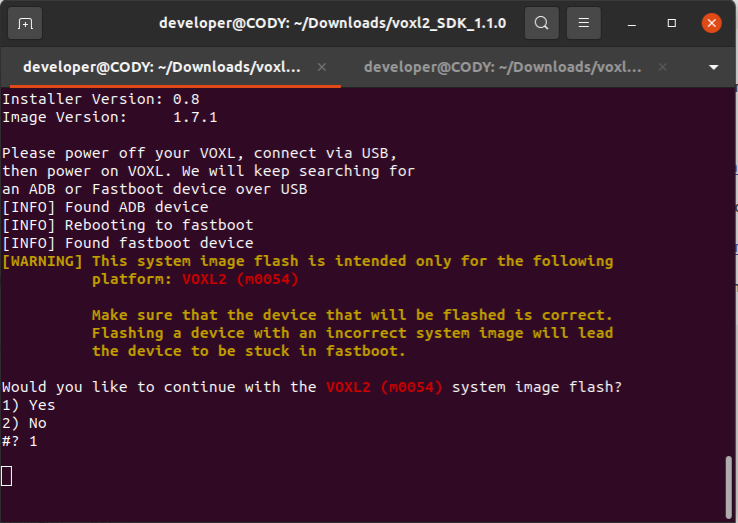
Seeker SLAM Setup HelpIt has been here since I pressed 1 an hour ago. I confirmed that the computer does in fact see the drone with the "adb devices" command.
-
Seeker SLAM Setup Help@tom I've begun the process to flash the new SDK on the drone. Is there an estimate of how long it takes? I have it running for about an hour now but there have been no updates. I'm flashing the VOXL 2 (QRB5165) SDK. Thanks.
-
Seeker SLAM Setup HelpI am using the Seeker SLAM Drone. I have been working very hard to get it setup for its first flight. But I am facing a few problems that I'm unable to solve.
After I get a GPS lock, I am trying to bind it to my transmitter which is failing (Spektrum DX 6e). I have tried youtube videos and guides which have not worked. It says "Bind Failed".
Also, the drone's camera server shuts down automatically after a few minutes of turning it on. I read about overheating issues so I put a fan on it and it still stops working after sometime. The VOXL version on the drone is 0.9.4
As of now, I'd like to bind the drone to the transmitter so that I can try flying it indoors. Please suggest any solutions/guides. Thankyou!