Please verify the PC data in rviz2. What you see in rviz2 should look exactly alike to what is shown in voxal portal for tof_pc. Note that the point step size is 12. See this guide for more info on pointcloud data message data
Point cloud data will look very different from image data, since the data field is constructed very different from BGR image formats.
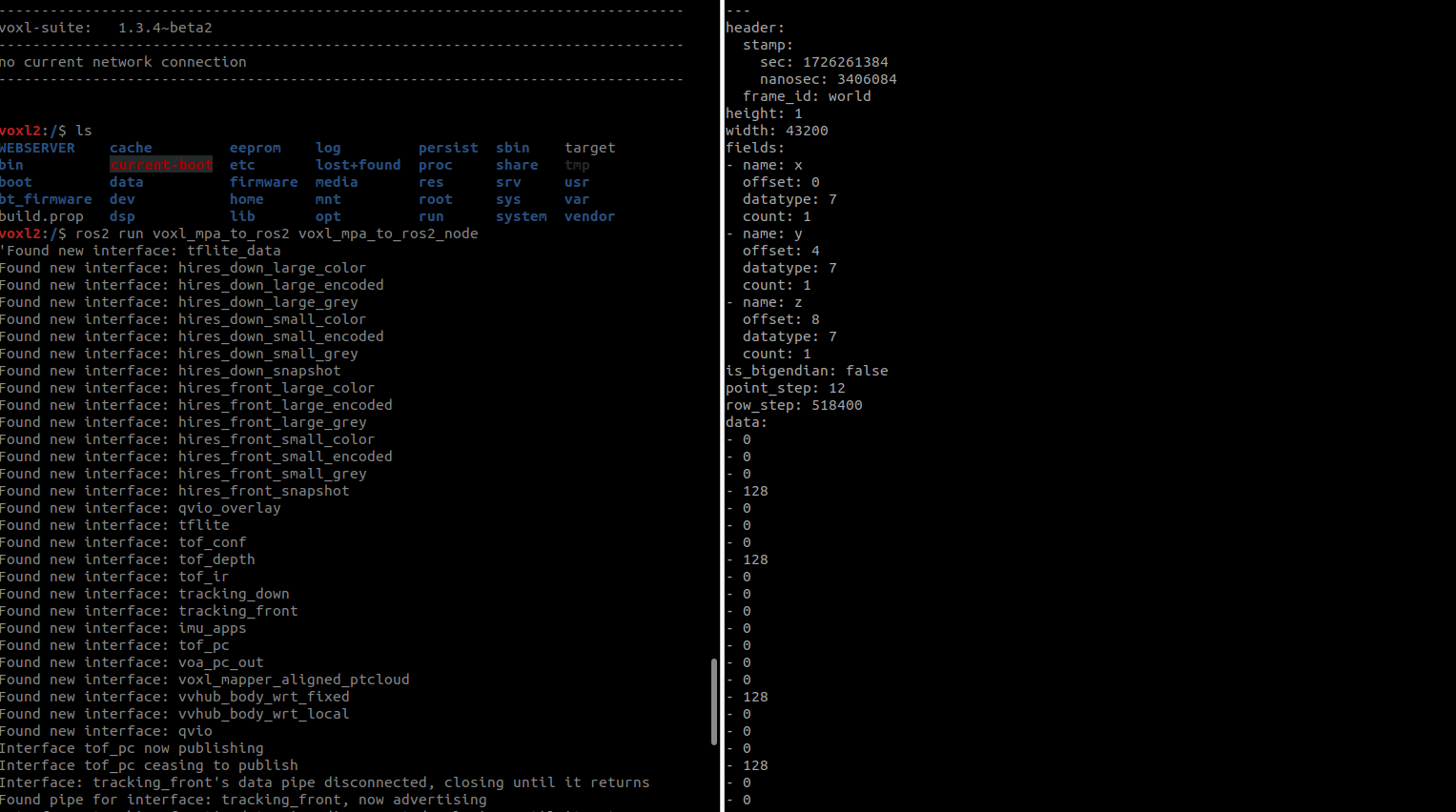
I have replicated these results in a starling2 as well, with voxl-mpa-to-ros2 dev branch:[image: 1727726700892-rospc_.png]
Note that you may need to spin up a static transform to see the pointcloud data in ROS:
ros2 run tf2_ros static_transform_publisher 0 0 0 0 0 0 map world