@Chad-Sweet Yes, we calibrated right before we ran the voxl-logger to get the data. We followed those instructions and the calibration was a success.
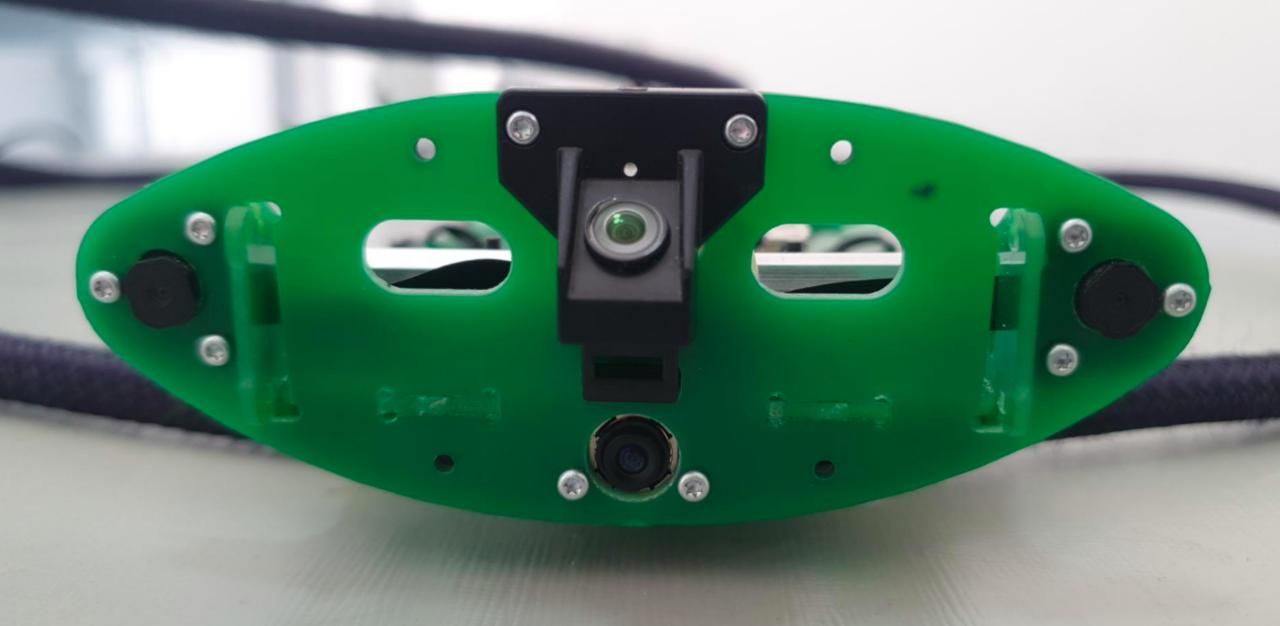
@Dobry-Kolacz Here are the photos of the front plate. We also tried to focus based on the center of the image, since there was always some blur towards the edges. Is it not focused enough?

U
Uros
@Uros
Posts
-
VOA outputting zeros as distances -
VOA outputting zeros as distances@Chad-Sweet
Yes, we noticed that as well, but this is the way the cameras are mounted on the flight deck so we thought the difference is small enough. The uploaded data is from a voxl flight deck with stereo cameras that were not touched, not from the setup where we replaced one of the cameras, sorry for the confusion. Can you recommend a way to level the cameras inside the flight deck or can this misalignment somehow be fixed through calibration maybe? -
VOA outputting zeros as distances@Chad-Sweet
Hello Chad and sorry for the delayed response. We uploaded the outputs of the logger. They can be found on this link. We tried the same stereo camera pair on two different boards and we still have the same problem. -
VOA outputting zeros as distancesHello,
We replaced one of the stereo cameras on the VOXL Flight Deck (without the flight controller), did the calibration procedure again (successfully, multiple times, with low reprojection errors) and encountered the problem that no obstacles are getting detected anymore (we did successful VOA flights before this).
The stereo cameras both work and the replaced camera seems to be placed well, but the disparity image is not that good. The 'dfs disparity' image in voxl portal shows almost nothing and in the 'dfs disparity scaled' we can see some spots appearing more and less bright, but we can not really see object outlines (nothing close to what we are able to see with a brand new Flight Deck). We had similar problems before, with different setups when cameras were moved or lost focus a bit, but recalibrating always helped to some extent. This time it is like the calibration has no effect. We did it multiple times and we tried using more images for the extrinsic calibration, but nothing changed.
When we run voxl-vision-px4 in the 'debug_stereo' mode, we can see that it always sends zeros as distances, even when there are spots appearing in the 'dfs disparity scaled' image (we assume this means the distance readings or the disparity calculations are bad so it sends zeros by default).
In Mission Planner, we can see that the obstacle_distance mavlink messages are coming through as they usually are, but all of the fields that are filled are set to 801 (max distance) so nothing is getting detected.
We tried restarting and reinstalling voxl-vision-px4 and voxl-dfs-server packages, but it did not help.
Could you please give us some advice what we could do, or if there is some way to diagnose problem further? Is there maybe a way to make the 'dfs disparity scaled' image better (as it is shown in your examples) apart from the calibration?
Thank you in advance!