@Denver-Bennett said in How do I connect MAVROS to PX4 with UDP ports?:
voxl-vision-hub.conf
did you ever get this resolved? having same issue.
S
@Denver-Bennett said in How do I connect MAVROS to PX4 with UDP ports?:
voxl-vision-hub.conf
did you ever get this resolved? having same issue.
S
NODES
/uas_20/
mavros (mavros/mavros_node)
mission_control_server (demins_mavros/mission_control_server.py)
ROS_MASTER_URI=http://10.10.0.50:11311/
process[uas_20/mavros-1]: started with pid [2835]
process[uas_20/mission_control_server-2]: started with pid [2836]
[INFO] [1767215095.413547]: Waiting for MAVROS services...
[INFO] [1767215095.511182]: Waiting for mavros/mission/push service...
[ WARN] [1767215095.880973783]: DS: plugin not configured!
[INFO] [1767215097.183459]: Waiting for mavros/mission/pull service...
[INFO] [1767215097.254429]: Waiting for mavros/mission/clear service...
[INFO] [1767215097.313131]: Waiting for mavros/mission/set_current service...
[INFO] [1767215097.362325]: Waiting for mavros/set_mode service...
[INFO] [1767215097.412324]: Waiting for mavros/cmd/arming service...
[INFO] [1767215097.469221]: Waiting for mavros/param/set service...
[INFO] [1767215097.520002]: All MAVROS services are available!
[INFO] [1767215097.541382]: Clearing all waypoints from FCU...
[ WARN] [1767215098.608210241]: WP: timeout, retries left 2
[ WARN] [1767215099.609752740]: WP: timeout, retries left 1
[ WARN] [1767215100.610535292]: WP: timeout, retries left 0
[ERROR] [1767215101.611777063]: WP: timed out.
[ERROR] [1767215101.616417]: Failed to clear waypoints
[INFO] [1767215101.670286]: Waypoint Mission Manager Initialized.
[INFO] [1767215101.864318]: Mission Control Server Initialized.
i'm at a loss here. tried everything with ports etc
here's my launch script
roslaunch projectx voxl_end.launch mav_sys_id:=20 fcu_url:="udp://127.0.0.1:14540@127.0.0.1:14550"
@tom thanks tom!
with voxl-configure-sku -w
I assumed the option to select is
6) px4-autonomy-dev-kit
i then ran voxl-configure-mpa
saw a few errors but the qvio is working now with no errors.
Sabri
@tom i ran
journalctl -u voxl-qvio-server
and saw this message as the extrinsics.conf file doesnot exist
failed to find extrinsics from imu_px4 to tracking in /etc/modalai/extrinsics.conf
@tom 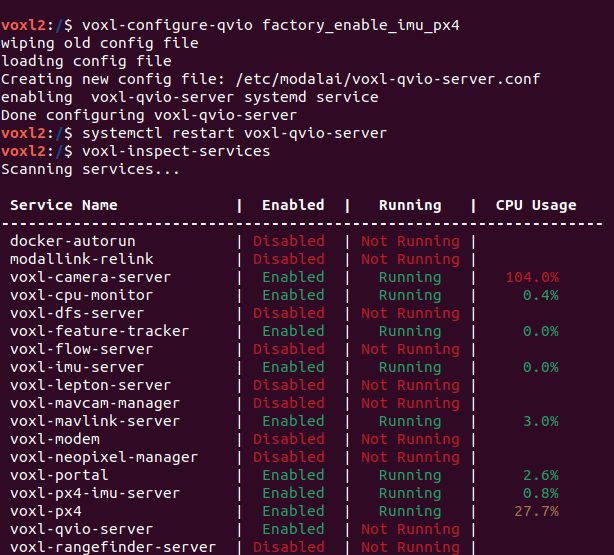 i did that and tried restarting the voxl-qvio-server but it wont start.
i did that and tried restarting the voxl-qvio-server but it wont start.
i've followed all instructions from calibrating the tracking camera
https://docs.modalai.com/calibrate-cameras
to
https://docs.modalai.com/voxl-m500-user-guide-using-vio
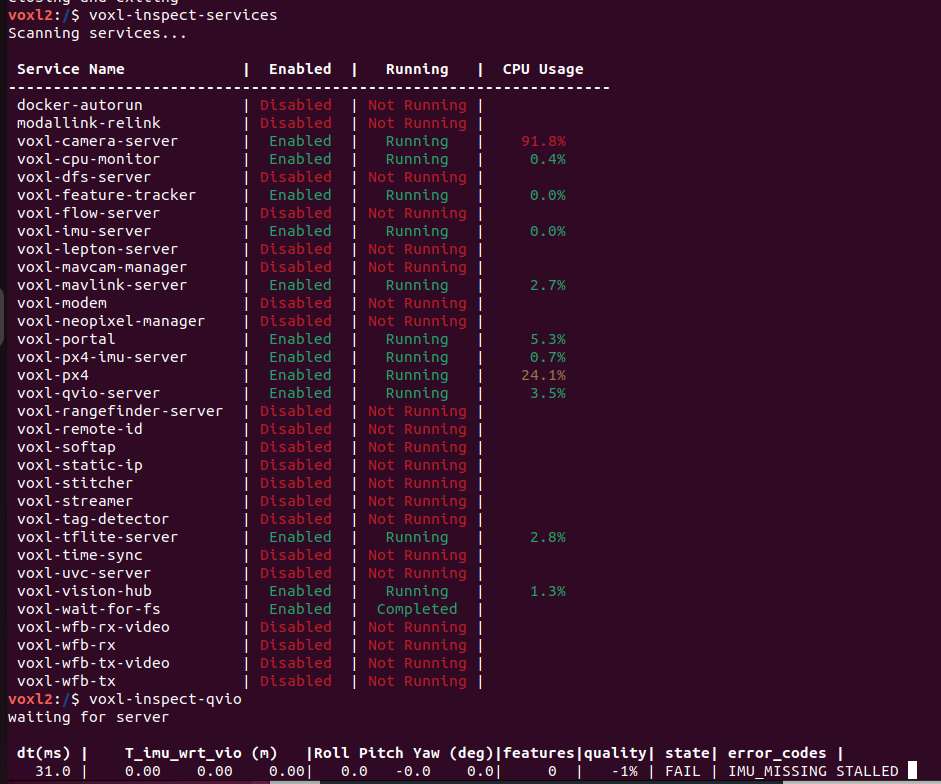
i've configured every setting with voxl-configure-qvio and still get the following error
voxl2:/$ voxl-inspect-qvio
waiting for server
dt(ms) | T_imu_wrt_vio (m) |Roll Pitch Yaw (deg)|features|quality| state| error_codes |
30.9 | 0.00 0.00 0.00| 0.0 -0.0 0.0| 0 | -1% | FAIL | IMU_MISSING STALLED
any ideas?
@bgaudel Did you ever get this resolved. I'm experiencing the same thing with IMU_MISSING STALLED
@thomas I already wrote a c helper function that uses libmodal-pipe to pipe tflite_data that my python script reads in realtime. it works well
per your message " small C++ helper program to take in images from the camera". how would i modify my c helper to use libmodal-pipe to stream data from one of the cameras?
@thomas i'm not using voxl-tflite-server. On my voxl2 i installed the latest version of YOLOv8 from Ultralytics https://docs.ultralytics.com/ and it works well when i run inference on local images. i wanted to test just using a local python script that streams video frames from the hires_small_color camera and runs inference.
@thomas Hey thomas, we've got the handshaking between your C helper program and our python script working well. i successfully loaded Yolov8 on the voxl and it works really well on images. Was wondering if we could open the camera pipe the same as the tflite_data pipe to run inference on the frames in realtime. i noticed in your /data/web_root/index.html that you are using websockets for serving the videos in the browsers. is this the better route?
@thomas its all working now.
had to reinstall the latest sdk. I'm guessing make install is a no-no. so just did a make and ran the executable.
voxl2:/libmodal-pipe/build/examples(master)$ ./modal-tflite_data-client
channel 0 connected to server
Bounding Box Coordinates:
score: 0.558105, x_min: 406.000000, y_min: 417.000000, x_max: 535.000000, y_max: 472.000000
Bounding Box Coordinates:
score: 0.429199, x_min: 427.000000, y_min: 370.000000, x_max: 573.000000, y_max: 426.000000
Bounding Box Coordinates:
score: 0.617676, x_min: 498.000000, y_min: 300.000000, x_max: 655.000000, y_max: 358.000000
Bounding Box Coordinates:
score: 0.416748, x_min: 505.000000, y_min: 302.000000, x_max: 659.000000, y_max: 359.000000
Bounding Box Coordinates:
score: 0.739258, x_min: 506.000000, y_min: 304.000000, x_max: 667.000000, y_max: 364.000000
Bounding Box Coordinates:
score: 0.493652, x_min: 4.000000, y_min: -1.000000, x_max: 781.000000, y_max: 109.000000
Bounding Box Coordinates:
score: 0.547852, x_min: 509.000000, y_min: 306.000000, x_max: 664.000000, y_max: 363.000000
Bounding Box Coordinates:
score: 0.640625, x_min: 505.000000, y_min: 310.000000, x_max: 660.000000, y_max: 369.000000
@thomas from my syslog
Jan 23 00:46:51 m0054 voxl-camera-server[4202]: /usr/bin/voxl-camera-server: symbol lookup error: /usr/bin/voxl-camera-server: undefined symbol: pipe_validate_mavlin
k_message_t
Jan 23 00:46:51 m0054 systemd[1]: voxl-camera-server.service: Main process exited, code=exited, status=127/n/a
Jan 23 00:46:51 m0054 systemd[1]: voxl-camera-server.service: Failed with result 'exit-code'.
Jan 23 00:46:51 m0054 voxl-px4[1656]: ERROR [muorb] SLPI: Failed to parse version request response packet!
Jan 23 00:46:53 m0054 voxl-px4[1656]: message repeated 534 times: [ ERROR [muorb] SLPI: Failed to parse version request response packet!]
Jan 23 00:46:53 m0054 systemd[1]: voxl-camera-server.service: Service hold-off time over, scheduling restart.
Jan 23 00:46:53 m0054 systemd[1]: voxl-camera-server.service: Scheduled restart job, restart counter is at 1.
Jan 23 00:46:53 m0054 systemd[1]: Stopped voxl-camera-server.
Jan 23 00:46:53 m0054 systemd[1]: Started voxl-camera-server.
Jan 23 00:46:53 m0054 voxl-camera-server[4226]: /usr/bin/voxl-camera-server: symbol lookup error: /usr/bin/voxl-camera-server: undefined symbol: pipe_validate_mavlin
k_message_t
Jan 23 00:46:53 m0054 systemd[1]: voxl-camera-server.service: Main process exited, code=exited, status=127/n/a
Jan 23 00:46:53 m0054 systemd[1]: voxl-camera-server.service: Failed with result 'exit-code'.
Jan 23 00:46:53 m0054 voxl-px4[1656]: ERROR [muorb] SLPI: Failed to parse version request response packet!
docker-autorun | Disabled | Not Running |
modallink-relink | Disabled | Not Running |
voxl-camera-server | Enabled | Not Running |
voxl-cpu-monitor | Enabled | Not Running |
voxl-dfs-server | Disabled | Not Running |
voxl-feature-tracker | Disabled | Not Running |
voxl-flow-server | Disabled | Not Running |
voxl-imu-server | Enabled | Running | 0.0%
voxl-lepton-server | Enabled | Not Running |
voxl-mavcam-manager | Disabled | Not Running |
voxl-mavlink-server | Enabled | Not Running |
voxl-modem | Disabled | Not Running |
voxl-neopixel-manager | Disabled | Not Running |
voxl-portal | Enabled | Not Running |
voxl-px4-imu-server | Disabled | Not Running |
voxl-px4 | Enabled | Running | 32.9%
voxl-qvio-server | Disabled | Not Running |
voxl-rangefinder-server | Disabled | Not Running |
voxl-remote-id | Disabled | Not Running |
voxl-softap | Disabled | Not Running |
voxl-static-ip | Disabled | Not Running |
voxl-stitcher | Disabled | Not Running |
voxl-streamer | Disabled | Not Running |
voxl-tag-detector | Disabled | Not Running |
voxl-tflite-server | Enabled | Running | 0.8%
voxl-time-sync | Disabled | Not Running |
voxl-uvc-server | Disabled | Not Running |
voxl-vision-hub | Enabled | Not Running |
voxl-wait-for-fs | Enabled | Completed |
voxl-wfb-rx-video | Disabled | Not Running |
voxl-wfb-rx | Disabled | Not Running |
voxl-wfb-tx-video | Disabled | Not Running |
voxl-wfb-tx | Disabled | Not Running |
voxl2:/$
all i did was compile and make install my modal-tflite_data-client.c file
@thomas so i included ai_detection.h and cast the char* data variable and compiled successfully and several of my services died ...lol
docker-autorun | Disabled | Not Running |
modallink-relink | Disabled | Not Running |
voxl-camera-server | Enabled | Not Running |
voxl-cpu-monitor | Enabled | Not Running |
voxl-dfs-server | Disabled | Not Running |
voxl-feature-tracker | Disabled | Not Running |
voxl-flow-server | Disabled | Not Running |
I've tried everything to restart both camera server and cpu monitor and no luck. Rebooted, Cycled Power,
Any thoughts on how to recover from this?
@sansoy so i updated my copy named modal-tflite_data-client.c with fields listed in tflite_data/info
{
"name": "tflite_data",
"location": "/run/mpa/tflite_data/",
"type": "ai_detection_t",
"server_name": "voxl-tflite-server",
"size_bytes": 16384,
"server_pid": 25994
}
Recompiled the script and ran
voxl2:/run/mpa/tflite_data$ modal-tflite_data-client
channel 0 connected to server
sending tflite_data to server control pipe
failed to send control command to server
ERROR: control pipe not available
but when i put a picture in front of it and the object detection is working i'm getting!
voxl2:/run/mpa/tflite_data$ modal-tflite_data-client
channel 0 connected to server
sending tflite_data to server control pipe
failed to send control command to server
ERROR: control pipe not available
received 172 bytes on channel 0: LXOV��O6
received 172 bytes on channel 0: LXOV��F[6
received 172 bytes on channel 0: LXOV7?_�6
received 172 bytes on channel 0: LXOV! ��6
received 172 bytes on channel 0: LXOV
���6
received 172 bytes on channel 0: LXOV����6
@thomas ok massive confusion.
i was able to download the example hello scripts and compile them and they work fine.
modal-hello-client.c
modal-hello-pause.c
modal-hello-server.c
modal-hello-sink.c
modal-kill-pipe.c
modal-pipe-ping.c
i then made copies of these and replaced hello with tflite_data and compiled successfuly
however, i cant seem to tie into tflite_data.
so when i'm running voxl-tflite-server two pipes show up, ie tflite and tflite_data
Doesnt that mean these pipes open already?
i tried my modal-tflite_data-client and got the following error
channel 0 connected to server
sending tflite_data to server control pipe
failed to send control command to server
ERROR: control pipe not available
ERROR, pipe is not of type "text"
closing
i just want to get the box coordinates from the pipe. Help me Obi Wan Kenobi!
@thomas Thanks Thomas! will get back to you....i'm sure!!
The following is a python script generated by bard.google.com which also runs but is not printing any data.
import ctypes
import os
class ObjectDetectionMsg(ctypes.Structure):
fields = [
("timestamp_ns", ctypes.c_int64),
("class_id", ctypes.c_uint32),
("class_name", ctypes.c_char * 64),
("class_confidence", ctypes.c_float),
("detection_confidence", ctypes.c_float),
("x_min", ctypes.c_float),
("y_min", ctypes.c_float),
("x_max", ctypes.c_float),
("y_max", ctypes.c_float),
]
pack = 1
class DetectionsArray(ctypes.Structure):
fields = [
("num_detections", ctypes.c_int32),
("detections", ObjectDetectionMsg * 64),
]
pack = 1
pipe_path = "/run/mpa/tflite_data/request"
pipe_fd = os.open(pipe_path, os.O_RDONLY)
while True:
# Read a detections_array structure from the pipe
data = os.read(pipe_fd, ctypes.sizeof(DetectionsArray))
# Parse the data into a DetectionsArray object
detections_array = DetectionsArray.from_buffer_copy(data)
# Process the detections
for i in range(detections_array.num_detections):
detection = detections_array.detections[i]
# Access detection fields as needed, e.g.,
print(f"Timestamp: {detection.timestamp_ns}")
print(f"Class ID: {detection.class_id}")
print(f"Class name: {detection.class_name.decode()}")
print(f"Class confidence: {detection.class_confidence}")
print(f"Detection confidence: {detection.detection_confidence}")
print(f"Bounding box: ({detection.x_min}, {detection.y_min}) - ({detection.x_max}, {detection.y_max})")
I'm not getting any data or errors except for the one error when i restart voxl-tflight-server which seems logical.
the metadata format is
// struct containing all relevant metadata to a tflite object detection
typedef struct ai_detection_t {
uint32_t magic_number;
int64_t timestamp_ns;
uint32_t class_id;
int32_t frame_id;
char class_name[BUF_LEN];
char cam[BUF_LEN];
float class_confidence;
float detection_confidence;
float x_min;
float y_min;
float x_max;
float y_max;
} attribute((packed)) ai_detection_t;
here's my code:
import struct
import os
object_detection_msg_format = 'qI64sfff4f'
detections_array_format = 'i'
object_detection_msg_size = struct.calcsize(object_detection_msg_format)
def unpack_object_detection_msg(data):
unpacked_data = struct.unpack(object_detection_msg_format, data)
return {
'timestamp_ns': unpacked_data[0],
'class_id': unpacked_data[1],
'class_name': unpacked_data[2].decode('utf-8').rstrip('\x00'),
'class_confidence': unpacked_data[3],
'detection_confidence': unpacked_data[4],
'x_min': unpacked_data[5],
'y_min': unpacked_data[6],
'x_max': unpacked_data[7],
'y_max': unpacked_data[8]
}
def read_detections(pipe_fd):
# Read the number of detections
num_detections_data = os.read(pipe_fd, struct.calcsize(detections_array_format))
if len(num_detections_data) != struct.calcsize(detections_array_format):
raise ValueError("Did not read the expected number of bytes for num_detections")
num_detections = struct.unpack(detections_array_format, num_detections_data)[0]
# Read and unpack each detection
detections = []
for _ in range(num_detections):
detection_data = os.read(pipe_fd, object_detection_msg_size)
detection = unpack_object_detection_msg(detection_data)
detections.append(detection)
return detections
pipe = open('/run/mpa/tflite_data/request', 'rb')
pipe_fd = pipe.fileno()
try:
detections = read_detections(pipe_fd)
print(detections)
finally:
pipe.close()
Any suggestions/solutions/help would be awesomely appreciated!
@thomas said in Can anyone recommend a Tflite Colab Notebook for VOXL2 Training:
It's important to note that voxl-tflite-server isn't intended to be a high-grade tool for running any ML model with great configurations and optimizations; it's just an example of how you can use the VOXL ecosystem to run models. As much as I would enjoy building such a tool and implementing your request (and the others I get), there just isn't enough of a business demand for it right now.
Thanks for the info. how can i get access to the box coordinates in the image?
@thomas WORKED! i did most of what you stated except for renaming my file to your filename. !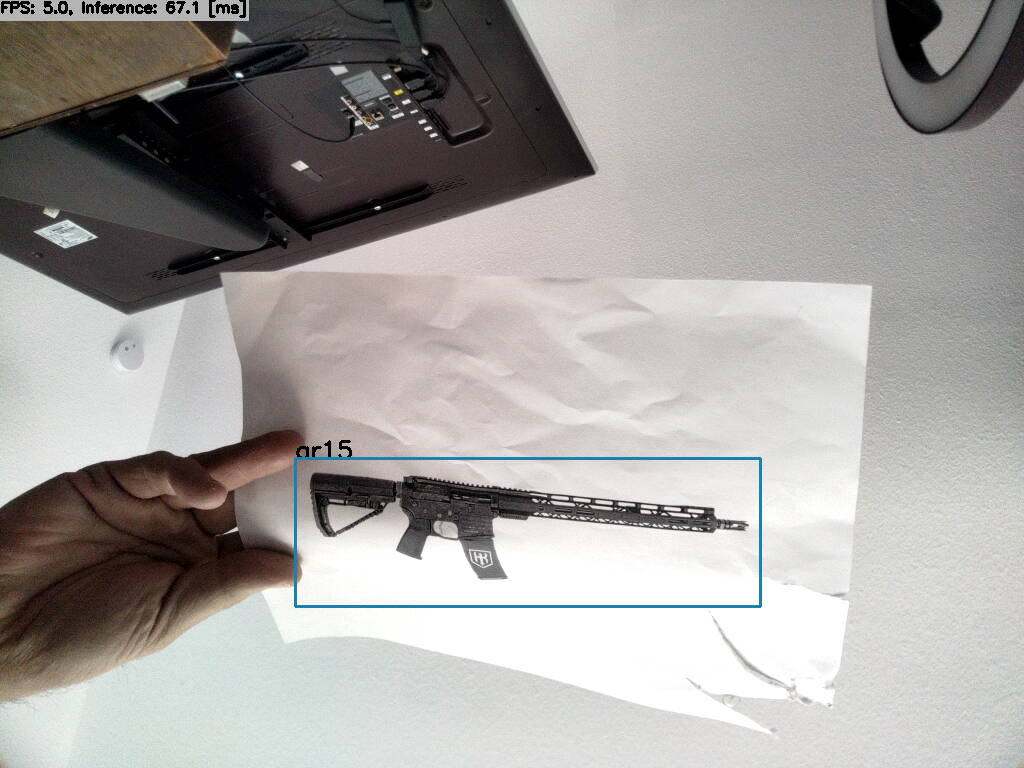
in a future release would be able to use the original filename vs renaming it to something that is hardcoded?