Regarding the Flex PCB M0177 for the M0178, is there a longer Flex PCB available as a substitute? The current length is somewhat difficult to work with.
Additionally, I couldn't find the specifications for the M0177 in the documentation. Could you provide them to me?
R
rogerli
@rogerli
Posts
-
ToF Flex PCB -
obstacle avoidance@modaltb
After using the lens for a while, it starts to defocus. During this period, the lens has been on the drone and hasn't been touched. What could be the possible reasons for the lens to defocus? -
obstacle avoidance@modaltb Thank you. I improved the defocusing issue by rotating the lens, but I still can't adjust it to achieve the same sharpness as the left lens.
-
obstacle avoidance@Moderator
Okay, then I can only use a stereo camera. However, the stereo camera I'm currently using has an issue: the image from the right lens is blurrier than the one from the left lens, resulting in a poor depth map.
In what situations can image blur occur?
left lens
.jpg](/assets/uploads/files/1720577388795-c827489d-86f6-45b2-a30f-411a21cc84d2-%E9%81%BF%E9%9A%9C%E5%B7%A6%E9%8F%A1%E9%A0%AD-%E6%AD%A3%E5%B8%B8.jpg)
right lens
.jpg](/assets/uploads/files/1720577415464-419d08c2-b885-4de8-b703-189ccc0396c5-%E9%81%BF%E9%9A%9C%E5%8F%B3%E9%8F%A1%E9%A0%AD-%E6%A8%A1%E7%B3%8A.jpg)
-
obstacle avoidance@Moderator
If I want to buy a ToF sensor, I think its adapter cable is not long enough. Is there an extension cable available, or can I only use the adapter cable that comes with the purchase? -
obstacle avoidanceI want to use VOXL2 for obstacle avoidance in offboard/mission mode. I read in the documentation that voxl-vision-hub and a rangefinder can achieve this goal. Do you have specific usage instructions? Additionally, can a ToF or stereo camera be used instead of a rangefinder?
-
Unable to communicate with add-on board@Vinny said in Unable to communicate with add-on board:
No. D1 means most of the system power is good. If it is OFF, your hardware has gone bad from that crash.
Thank you for your response. I wanted to inquire about the situation because the VOXL2 that had been dropped is functioning normally except for unstable MH/WIFI communication.
-
Unable to communicate with add-on board -
Unable to communicate with add-on board@Vinny Thank you for your response. So it's normal that DS2 doesn't light up? Also, do I need to reflash the SDK or unbrick the VOXL2?
-
Unable to communicate with add-on board@Vinny
I placed insulating tape between the VOXL2 and the MH add-on board to ensure they don't make direct contact, but it still didn't resolve the communication issue. D1 still lights up and DS2 turns off, and I still can't find the IP address of the MH.Only D1 and DS1 light up
-
Unable to communicate with add-on board@Vinny Here are my current settings and the power module can run normally.
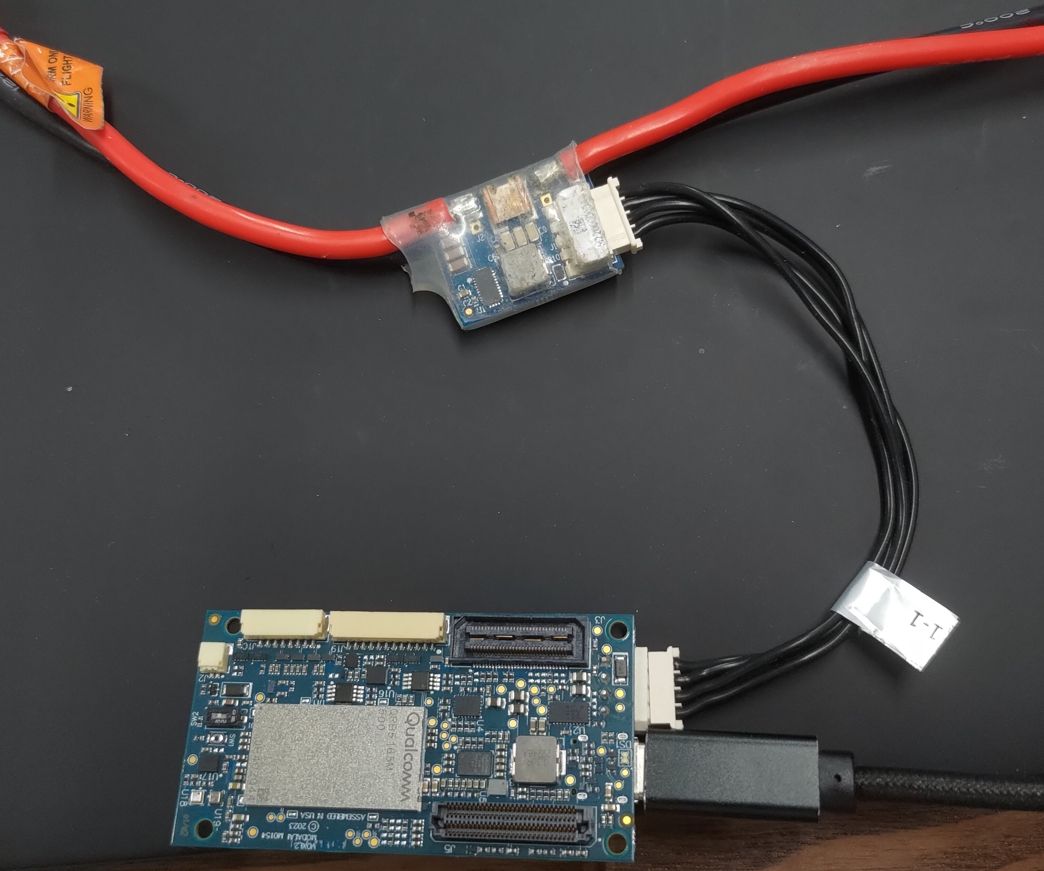
Additionally, I previously had an external flight controller connected to J18, a Microhard add-on board connected to J3, and a stereo camera connected to J6.
-
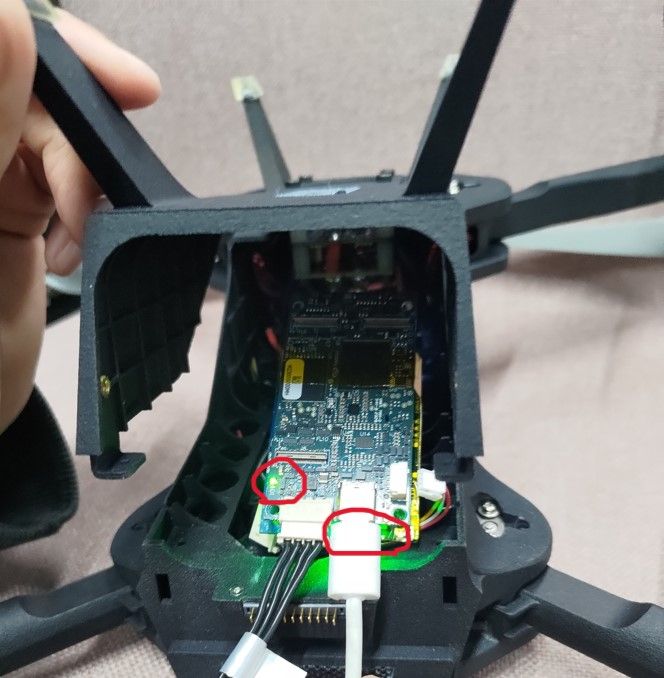
Unable to communicate with add-on boardHello, I encountered some issues with my VOXL2. Initially, it showed a red light when powered on. After disconnecting all connections and powering it on again, the light turned green. However, I couldn't connect via adb. Later, after leaving it for some time, I was suddenly able to connect via adb. At this point, I noticed some strange behavior with the LEDs. Firstly, D1 had a yellow light, and then DS2 would turn off about five seconds after powering on.
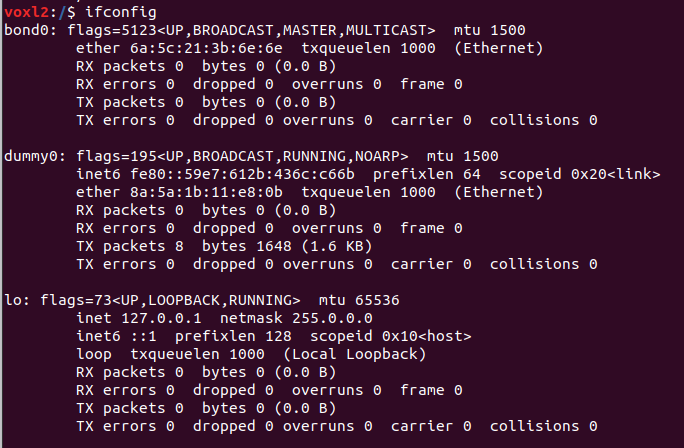
Regarding functionality, I used voxl-inspect-server to check, and all the opened servers appeared to be working fine. However, I found that there was only power but no communication between VOXL2 and the Microhard add-on board (the Microhard could pair with my computer). When I checked with ifconfig, I noticed that VOXL2 did not display usb0 or eth0. Even when using a WiFi dongle, wlo0 was not displayed.
What is the current status of VOXL2? What steps should I take to ensure that VOXL2 functions properly?
-
Can not connect to VOXL2@tom
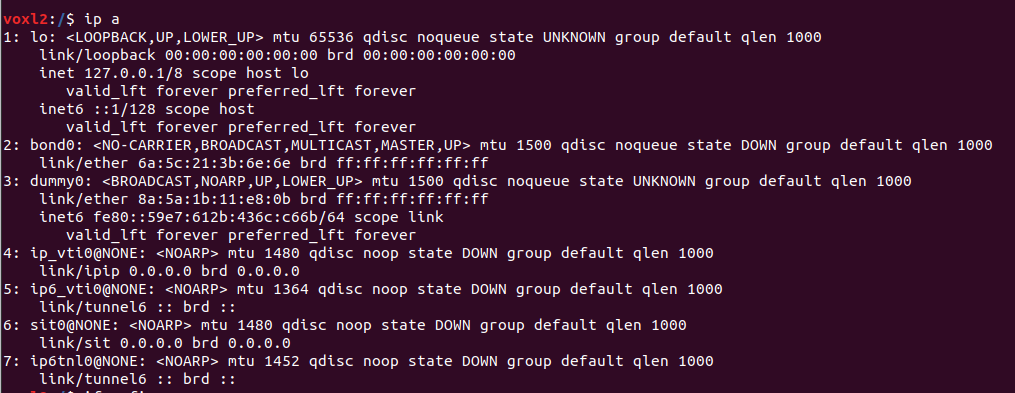
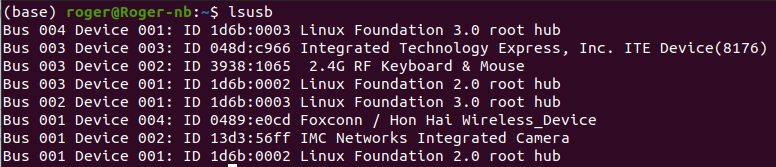
Here are the situations without connecting to VOXL2:
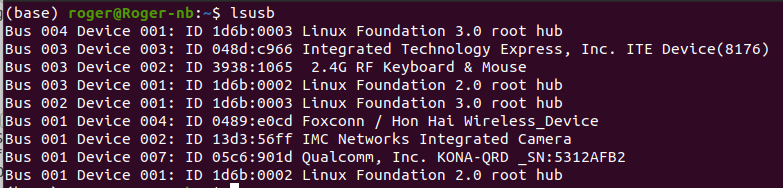
Here is the situation with VOXL2 connected and running normally:
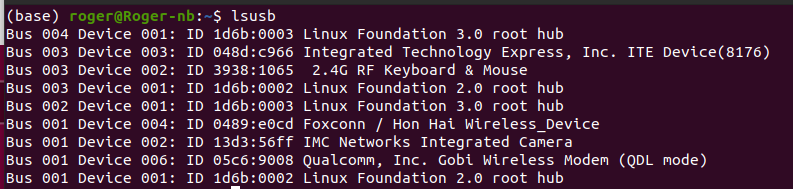
Here is the situation with VOXL2 connected but encountering issues:
When I slide the SW2 switch into the OFF position, it remains in the QDL mode and I am unable to connect via adb. Is there any way to solve this issue?
-
collision prevention problem@Eric-Katzfey Sorry, I didn't save the stereo camera images from voxl-logger, so I can only provide the PX4 log file. Currently, I am addressing the exposure issue using the method I mentioned earlier, and it seems to have improved the effectiveness of collision prevention. Additionally, to ensure that the drone can stably stop in front of obstacles, I made the following modifications to the voxl-vision-hub code.
int pie_binner_filter_to_mavlink_msg(pie_binner_t* b, mavlink_message_t* msg) { int i,j; // final distance data for px4 uint16_t distances[72]; uint16_t dist_max_cm = b->dist_table.dist_max * 100.0f; // now set the bins to max_distance +1 means no obstacle is present. for(i=0;i<72;i++){ distances[i] = dist_max_cm - 10; } if(b->ringbuf.items_in_buf>0){ // scan bins for any that meet the criteria // for each angle.... for(i=0; i<b->rows; i++){ // scan the distances from inside out, remember we have one extra column // than we do distance bins for(j=0; j<(b->cols-EXTRA_BINS_TO_CHECK); j++){ // skip empty bins if(b->map_points[i][j] <= 0) continue; // sum up points in this bin, the two on either side // and the three behind it int sum = 0; for(int k=-1; k<=1; k++){ // row (angle) to inspect with wraparound check int ii = i-k; if(ii<0) ii+=b->rows; else if(ii>=b->rows) ii-=b->rows; // sum points in this bin plus extras for(int m=0; m<=EXTRA_BINS_TO_CHECK; m++){ sum += b->map_points[ii][j+m]; } } // check the sum of points in all the neighbors if(sum >= b->pie_threshold){ float dist_m = b->map_dist[i][j] / b->map_points[i][j]; // if(dist_m<0.1f) continue; // error check, not needed? uint16_t dist_cm = dist_m * 100.0f; if(dist_cm<150) continue; else if(dist_cm>=150){ distances[i] = dist_cm; last_dis[i] = distances[i]; zero_count[i] = 0; //printf("added a distance! i: %d j:%d dist: %5.1fm\n", i, j, (double)dist_m); break; // move onto next angle } // distances[i] = dist_cm; // break; } } if(zero_count[i]<30){ distances[i] = last_dis[i]; zero_count[i]++; } } } // TODO investigate if min distance changes px4 behavior or not #define MIN_DISTANCE_CM 0 // set other params for mavlink message uint64_t time_usec = 0; uint8_t increment_int = 0; // use the float field instead float increment_f = 360.0f / b->tan_table.n_bins; float angle_offset = 0.0f; // 0 means bin 0 is straight ahead along X mavlink_msg_obstacle_distance_pack(autopilot_monitor_get_sysid(), VOXL_COMPID,\ msg, time_usec, MAV_DISTANCE_SENSOR_UNKNOWN, distances, increment_int,\ MIN_DISTANCE_CM, dist_max_cm, increment_f, angle_offset, MAV_FRAME_BODY_FRD); return 0; }However, during the drone's flight to the right, it suddenly pauses. The drone's distance sensors are only equipped with front-facing stereo cameras, so they shouldn't detect obstacles on the right side. Why is this happening? Is there a way to solve it?
Here is my PX4 log file
https://review.px4.io/plot_app?log=fb1ae613-4e56-49a2-a60f-bc272edd78c1 -
Can not connect to VOXL2I have a VOXL2 board that was previously working fine. Today, while using the ADB shell in WSL, I discovered I could not connect to it, but I was able to connect using an Ubuntu computer. After connecting, I configured a WiFi dongle and used SCP to upload about 2GB of files to the board. After a while, I noticed the SCP command had not completed, and later attempts to connect via SSH also failed. At this time, the light on the WiFi dongle was flashing slowly instead of blinking rapidly as it does when connected.
I tried power cycling, but the light on the WiFi dongle remained abnormal. I also tried changing the addon board and the WiFi dongle, but only once did I see the light on the WiFi dongle flicker (though it still didn't connect); after that, the light on the WiFi dongle did not come on again. I also attempted to use the ADB shell, but the device could not be found.
I followed the unbricking instructions to try flashing, but it failed halfway through. Below is the execution message.
aiseed@ThinkPad-T15g:~/Downloads/1.1.2-M0054-14.1a-FLAT-V3/ufs$ sudo qdl --debug --storage ufs --include . prog_firehose_ddr.elf rawprogram_unsparse0.xml rawprogram1.xml rawprogram2.xml rawprogram3.xml rawprogram4.xml rawprogram5.xml patch0.xml patch1.xml patch2.xml patch3.xml patch4.xml patch5.xml HELLO version: 0x2 compatible: 0x1 max_len: 1024 mode: 0 READ64 image: 13 offset: 0x0 length: 0x40 READ64 image: 13 offset: 0x40 length: 0x310 READ64 image: 13 offset: 0x1000 length: 0x1000 READ64 image: 13 offset: 0x2000 length: 0xc48 READ64 image: 13 offset: 0x3000 length: 0x1000 READ64 image: 13 offset: 0x4000 length: 0x1000 READ64 image: 13 offset: 0x5000 length: 0x1000 READ64 image: 13 offset: 0x6000 length: 0x1000 READ64 image: 13 offset: 0x7000 length: 0x1000 READ64 image: 13 offset: 0x8000 length: 0x1000 READ64 image: 13 offset: 0x9000 length: 0x1000 READ64 image: 13 offset: 0xa000 length: 0x1000 READ64 image: 13 offset: 0xb000 length: 0x1000 READ64 image: 13 offset: 0xc000 length: 0x1000 READ64 image: 13 offset: 0xd000 length: 0x1000 READ64 image: 13 offset: 0xe000 length: 0x1000 READ64 image: 13 offset: 0xf000 length: 0x1000 READ64 image: 13 offset: 0x10000 length: 0x1000 READ64 image: 13 offset: 0x11000 length: 0x1000 READ64 image: 13 offset: 0x12000 length: 0x1000 READ64 image: 13 offset: 0x13000 length: 0x1000 READ64 image: 13 offset: 0x14000 length: 0x1000 READ64 image: 13 offset: 0x15000 length: 0x1000 READ64 image: 13 offset: 0x16000 length: 0x1000 READ64 image: 13 offset: 0x17000 length: 0x1000 READ64 image: 13 offset: 0x18000 length: 0x1000 READ64 image: 13 offset: 0x19000 length: 0x1000 READ64 image: 13 offset: 0x1a000 length: 0x1000 READ64 image: 13 offset: 0x1b000 length: 0x1000 READ64 image: 13 offset: 0x1c000 length: 0x1000 READ64 image: 13 offset: 0x1d000 length: 0x1000 READ64 image: 13 offset: 0x1e000 length: 0x1000 READ64 image: 13 offset: 0x1f000 length: 0x1000 READ64 image: 13 offset: 0x20000 length: 0x1000 READ64 image: 13 offset: 0x21000 length: 0x1000 READ64 image: 13 offset: 0x22000 length: 0x1000 READ64 image: 13 offset: 0x23000 length: 0x1000 READ64 image: 13 offset: 0x24000 length: 0x1000 READ64 image: 13 offset: 0x25000 length: 0x1000 READ64 image: 13 offset: 0x26000 length: 0x1000 READ64 image: 13 offset: 0x27000 length: 0x1000 READ64 image: 13 offset: 0x28000 length: 0x1000 READ64 image: 13 offset: 0x29000 length: 0x1000 READ64 image: 13 offset: 0x2a000 length: 0x1000 READ64 image: 13 offset: 0x2b000 length: 0x1000 READ64 image: 13 offset: 0x2c000 length: 0x1000 READ64 image: 13 offset: 0x2d000 length: 0x1000 READ64 image: 13 offset: 0x2e000 length: 0x1000 READ64 image: 13 offset: 0x2f000 length: 0x1000 READ64 image: 13 offset: 0x30000 length: 0x1000 READ64 image: 13 offset: 0x31000 length: 0x1000 READ64 image: 13 offset: 0x32000 length: 0x1000 READ64 image: 13 offset: 0x33000 length: 0x1000 READ64 image: 13 offset: 0x34000 length: 0x1000 READ64 image: 13 offset: 0x35000 length: 0x1000 READ64 image: 13 offset: 0x36000 length: 0x1000 READ64 image: 13 offset: 0x37000 length: 0x1000 READ64 image: 13 offset: 0x38000 length: 0x1000 READ64 image: 13 offset: 0x39000 length: 0x1000 READ64 image: 13 offset: 0x3a000 length: 0x1000 READ64 image: 13 offset: 0x3b000 length: 0x1000 READ64 image: 13 offset: 0x3c000 length: 0x1000 READ64 image: 13 offset: 0x3d000 length: 0x1000 READ64 image: 13 offset: 0x3e000 length: 0x1000 READ64 image: 13 offset: 0x3f000 length: 0x1000 READ64 image: 13 offset: 0x40000 length: 0x1000 READ64 image: 13 offset: 0x41000 length: 0x1000 READ64 image: 13 offset: 0x42000 length: 0x1000 READ64 image: 13 offset: 0x43000 length: 0x1000 READ64 image: 13 offset: 0x44000 length: 0x1000 READ64 image: 13 offset: 0x45000 length: 0x1000 READ64 image: 13 offset: 0x46000 length: 0x1000 READ64 image: 13 offset: 0x47000 length: 0x1000 READ64 image: 13 offset: 0x48000 length: 0x1000 READ64 image: 13 offset: 0x49000 length: 0x1000 READ64 image: 13 offset: 0x4a000 length: 0x1000 READ64 image: 13 offset: 0x4b000 length: 0x1000 READ64 image: 13 offset: 0x4c000 length: 0x1000 READ64 image: 13 offset: 0x4d000 length: 0x1000 READ64 image: 13 offset: 0x4e000 length: 0x1000 READ64 image: 13 offset: 0x4f000 length: 0x1000 READ64 image: 13 offset: 0x50000 length: 0x1000 READ64 image: 13 offset: 0x51000 length: 0x1000 READ64 image: 13 offset: 0x52000 length: 0x1000 READ64 image: 13 offset: 0x53000 length: 0x1000 READ64 image: 13 offset: 0x54000 length: 0x1000 READ64 image: 13 offset: 0x55000 length: 0x1000 READ64 image: 13 offset: 0x56000 length: 0x1000 READ64 image: 13 offset: 0x57000 length: 0x1000 READ64 image: 13 offset: 0x58000 length: 0x1000 READ64 image: 13 offset: 0x59000 length: 0x1000 READ64 image: 13 offset: 0x5a000 length: 0x1000 READ64 image: 13 offset: 0x5b000 length: 0x1000 READ64 image: 13 offset: 0x5c000 length: 0x1000 READ64 image: 13 offset: 0x5d000 length: 0x1000 READ64 image: 13 offset: 0x5e000 length: 0x1000 READ64 image: 13 offset: 0x5f000 length: 0x1000 READ64 image: 13 offset: 0x60000 length: 0x1000 READ64 image: 13 offset: 0x61000 length: 0x1000 READ64 image: 13 offset: 0x62000 length: 0x1000 READ64 image: 13 offset: 0x63000 length: 0x1000 READ64 image: 13 offset: 0x64000 length: 0x1000 READ64 image: 13 offset: 0x65000 length: 0x16c READ64 image: 13 offset: 0x65170 length: 0x1000 READ64 image: 13 offset: 0x66170 length: 0x1000 READ64 image: 13 offset: 0x67170 length: 0x1000 READ64 image: 13 offset: 0x68170 length: 0x1000 READ64 image: 13 offset: 0x69170 length: 0x1000 READ64 image: 13 offset: 0x6a170 length: 0x1000 READ64 image: 13 offset: 0x6b170 length: 0x1000 READ64 image: 13 offset: 0x6c170 length: 0x1000 READ64 image: 13 offset: 0x6d170 length: 0x1000 READ64 image: 13 offset: 0x6e170 length: 0x1000 READ64 image: 13 offset: 0x6f170 length: 0x1000 READ64 image: 13 offset: 0x70170 length: 0x1000 READ64 image: 13 offset: 0x71170 length: 0x6a0 READ64 image: 13 offset: 0x71810 length: 0x1000 READ64 image: 13 offset: 0x72810 length: 0x1000 READ64 image: 13 offset: 0x73810 length: 0x1000 READ64 image: 13 offset: 0x74810 length: 0x1000 READ64 image: 13 offset: 0x75810 length: 0x1000 READ64 image: 13 offset: 0x76810 length: 0x1000 READ64 image: 13 offset: 0x77810 length: 0x1000 READ64 image: 13 offset: 0x78810 length: 0x1000 READ64 image: 13 offset: 0x79810 length: 0x1000 READ64 image: 13 offset: 0x7a810 length: 0x1000 READ64 image: 13 offset: 0x7b810 length: 0x1000 READ64 image: 13 offset: 0x7c810 length: 0x1000 READ64 image: 13 offset: 0x7d810 length: 0x1000 READ64 image: 13 offset: 0x7e810 length: 0x1000 READ64 image: 13 offset: 0x7f810 length: 0x1000 READ64 image: 13 offset: 0x80810 length: 0x1000 READ64 image: 13 offset: 0x81810 length: 0xcc READ64 image: 13 offset: 0x818e0 length: 0x84 READ64 image: 13 offset: 0x81964 length: 0x1000 READ64 image: 13 offset: 0x82964 length: 0x1000 READ64 image: 13 offset: 0x83964 length: 0x1000 READ64 image: 13 offset: 0x84964 length: 0x1000 READ64 image: 13 offset: 0x85964 length: 0x1000 READ64 image: 13 offset: 0x86964 length: 0x1000 READ64 image: 13 offset: 0x87964 length: 0x1000 READ64 image: 13 offset: 0x88964 length: 0x134 READ64 image: 13 offset: 0x88a98 length: 0x1000 READ64 image: 13 offset: 0x89a98 length: 0x1000 READ64 image: 13 offset: 0x8aa98 length: 0x1000 READ64 image: 13 offset: 0x8ba98 length: 0x1000 READ64 image: 13 offset: 0x8ca98 length: 0x1000 READ64 image: 13 offset: 0x8da98 length: 0x1000 READ64 image: 13 offset: 0x8ea98 length: 0x3f0 READ64 image: 13 offset: 0x8ee88 length: 0x1000 READ64 image: 13 offset: 0x8fe88 length: 0x1000 READ64 image: 13 offset: 0x90e88 length: 0x1000 READ64 image: 13 offset: 0x91e88 length: 0x1000 READ64 image: 13 offset: 0x92e88 length: 0x1000 READ64 image: 13 offset: 0x93e88 length: 0x1000 READ64 image: 13 offset: 0x94e88 length: 0x3f0 READ64 image: 13 offset: 0x95278 length: 0x1000 READ64 image: 13 offset: 0x96278 length: 0x1000 READ64 image: 13 offset: 0x97278 length: 0x1000 READ64 image: 13 offset: 0x98278 length: 0x1000 READ64 image: 13 offset: 0x99278 length: 0x1000 READ64 image: 13 offset: 0x9a278 length: 0x1000 READ64 image: 13 offset: 0x9b278 length: 0x1000 READ64 image: 13 offset: 0x9c278 length: 0x1000 READ64 image: 13 offset: 0x9d278 length: 0x1000 READ64 image: 13 offset: 0x9e278 length: 0x1000 READ64 image: 13 offset: 0x9f278 length: 0x1000 READ64 image: 13 offset: 0xa0278 length: 0x1000 READ64 image: 13 offset: 0xa1278 length: 0x1000 READ64 image: 13 offset: 0xa2278 length: 0x1000 READ64 image: 13 offset: 0xa3278 length: 0x1000 READ64 image: 13 offset: 0xa4278 length: 0x1000 READ64 image: 13 offset: 0xa5278 length: 0x1000 READ64 image: 13 offset: 0xa6278 length: 0x1000 READ64 image: 13 offset: 0xa7278 length: 0x1000 READ64 image: 13 offset: 0xa8278 length: 0x1000 READ64 image: 13 offset: 0xa9278 length: 0x1000 READ64 image: 13 offset: 0xaa278 length: 0x1000 END OF IMAGE image: 13 status: 0 DONE status: 1 FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: Binary build date: Aug 17 2021 @ 23:37:37" /></data> LOG: INFO: Binary build date: Aug 17 2021 @ 23:37:37 FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: Binary build date: Aug 17 2021 @ 23:37:37 " /></data> LOG: INFO: Binary build date: Aug 17 2021 @ 23:37:37 FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: Chip serial num: 185920495 (0xb14ebef)" /></data> LOG: INFO: Chip serial num: 185920495 (0xb14ebef) FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: Supported Functions (15):" /></data> LOG: INFO: Supported Functions (15): FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: program" /></data> LOG: INFO: program FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: read" /></data> LOG: INFO: read FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: nop" /></data> LOG: INFO: nop FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: patch" /></data> LOG: INFO: patch FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: configure" /></data> LOG: INFO: configure FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: setbootablestoragedrive" /></data> LOG: INFO: setbootablestoragedrive FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: erase" /></data> LOG: INFO: erase FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: power" /></data> LOG: INFO: power FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: firmwarewrite" /></data> LOG: INFO: firmwarewrite FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: getstorageinfo" /></data> LOG: INFO: getstorageinfo FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: benchmark" /></data> LOG: INFO: benchmark FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: emmc" /></data> LOG: INFO: emmc FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: ufs" /></data> LOG: INFO: ufs FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: fixgpt" /></data> LOG: INFO: fixgpt FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: getsha256digest" /></data> LOG: INFO: getsha256digest FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: End of supported functions 15" /></data> LOG: INFO: End of supported functions 15 qdl: firehose operation timed out FIREHOSE WRITE: <?xml version="1.0"?> <data><configure MemoryName="ufs" MaxPayloadSizeToTargetInBytes="1048576" verbose="0" ZLPAwareHost="1" SkipStorageInit="0"/></data> FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: Calling handler for configure" /></data> LOG: INFO: Calling handler for configure FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: Storage type set to value UFS" /></data> LOG: INFO: Storage type set to value UFS FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <response value="ACK" MemoryName="UFS" MinVersionSupported="1" Version="1" MaxPayloadSizeToTargetInBytes="1048576" MaxPayloadSizeToTargetInBytesSupported="1048576" MaxXMLSizeInBytes="4096" DateTime="Aug 17 2021 - 23:37:37" /></data> [CONFIGURE] max payload size: 1048576 FIREHOSE WRITE: <?xml version="1.0"?> <data><program SECTOR_SIZE_IN_BYTES="4096" num_partition_sectors="32776" physical_partition_number="0" start_sector="3154440" filename="qti-ubuntu-robotics-image-qrb5165-rb5-sysfs_1.ext4"/></data> FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="INFO: Calling handler for program" /></data> LOG: INFO: Calling handler for program FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="ERROR: Failed to initialize (open whole lun) UFS Device slot 0 partition 0" /></data> LOG: ERROR: Failed to initialize (open whole lun) UFS Device slot 0 partition 0 FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="ERROR: Failed to open the device:3 slot:0 partition:0 error:0" /></data> LOG: ERROR: Failed to open the device:3 slot:0 partition:0 error:0 FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="ERROR: OPEN handle NULL and no error, weird 344489460" /></data> LOG: ERROR: OPEN handle NULL and no error, weird 344489460 FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <log value="ERROR: Failed to open device, type:UFS, slot:0, lun:0 error:3" /></data> LOG: ERROR: Failed to open device, type:UFS, slot:0, lun:0 error:3 FIREHOSE READ: <?xml version="1.0" encoding="UTF-8" ?> <data> <response value="NAK" rawmode="false" /></data> [PROGRAM] failed to setup programming aiseed@ThinkPad-T15g:~/Downloads/1.1.2-M0054-14.1a-FLAT-V3/ufs$ -
collision prevention problem@thomas @Eric-Katzfey Although I haven't looked at the logs of VOXL2 and PX4 before, I will try to read them and identify the issues. Additionally, while conducting collision prevention, I would like to understand the range of obstacles detected in the image and the parameters which can adjust it when the drone is flying forward. Currently, I am considering modifying the code based on this range so that the exposure parameters can be automatically adjusted based on the brightness changes within the range. Would this approach be able to improve the exposure issues in collision prevention?
-
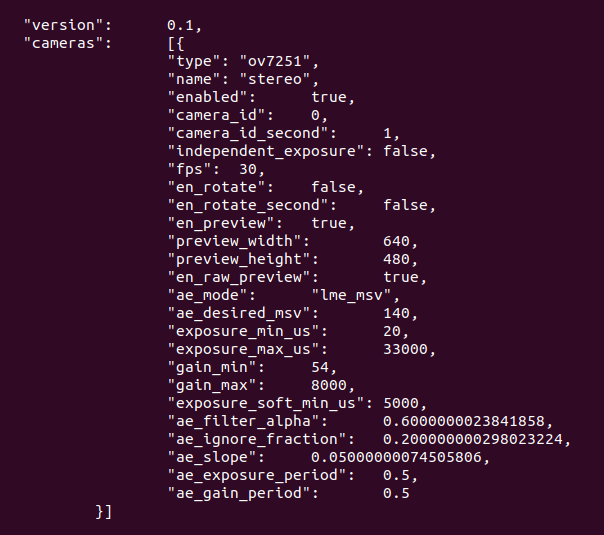
collision prevention problem@Eric-Katzfey We are conducting outdoor tests for collision prevention using the M0015 stereo camera. The main parameters we adjusted include ae_desired_msv in voxl-camera-server.conf and blur_size, post_median_size, and cost_threshold in voxl-dfs-server.conf. However, we have encountered some issues that have led to subpar performance in collision prevention. The problems are as follows:
- The influence of lighting conditions such as backlighting, glare, etc., can cause the stereo camera to malfunction and make it challenging to find a set of parameters that work well in all situations.
- When the drone stops in front of an obstacle, sometimes it suddenly moves forward a short distance and then stops again. I suspect it may be due to the drone's body offset or lighting conditions causing a momentary failure in obstacle detection by the stereo camera.
- Would higher resolution cameras better capture obstacle features and thus improve the effectiveness of collision prevention?
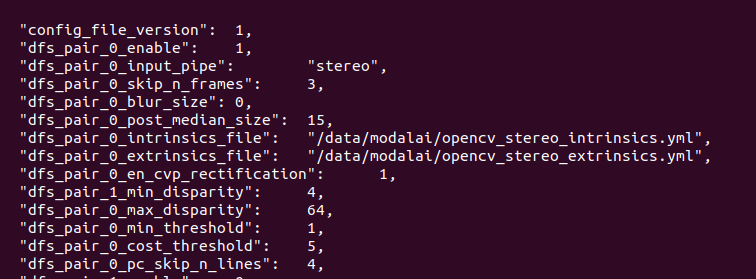
Regarding the above issues, do you have any suggestions or ideas? Any guidance you can provide would be greatly appreciated. Below are the parameters I'm currently using.
voxl-camera-server.conf
voxl-dfs-server.conf
-
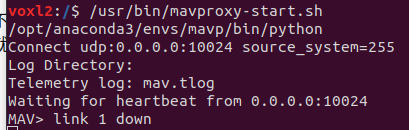
Issue with Microhard IP configuration.@tom I had the same idea, so I directly installed Mavproxy and related packages on VOXL2, and successfully resolved the issue with the serial library. However, when running the service, I still couldn't import the Python files related to Mavproxy. Even adding the paths of those Python files to the environment variables didn't solve the problem.
-
Issue with Microhard IP configuration.@tom Yes, it can run normally
-
Issue with Microhard IP configuration.@tom I'll need to confirm tomorrow, but I believe I have it installed because I can manually run mavproxy.py from the command line. However, when executing it automatically with a script in the system, I encounter the aforementioned issue.