@modaltb said in offboard mode in voxl m500:
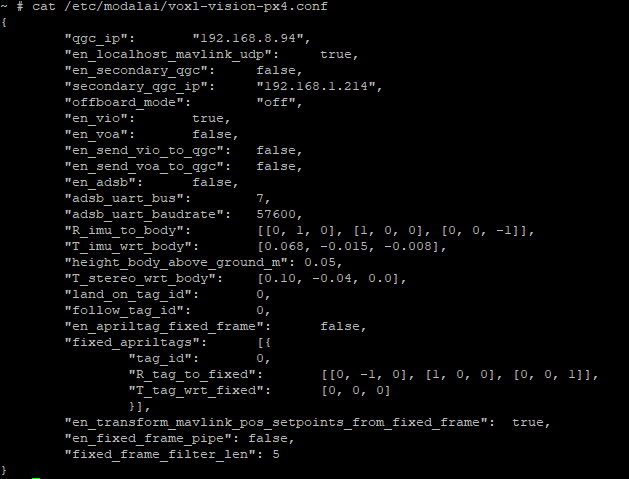
l-vision-px4 program
Oh I see, I had tried it worked with marvos, in offboard mode. But the altitude of voxl m500 was incorrect 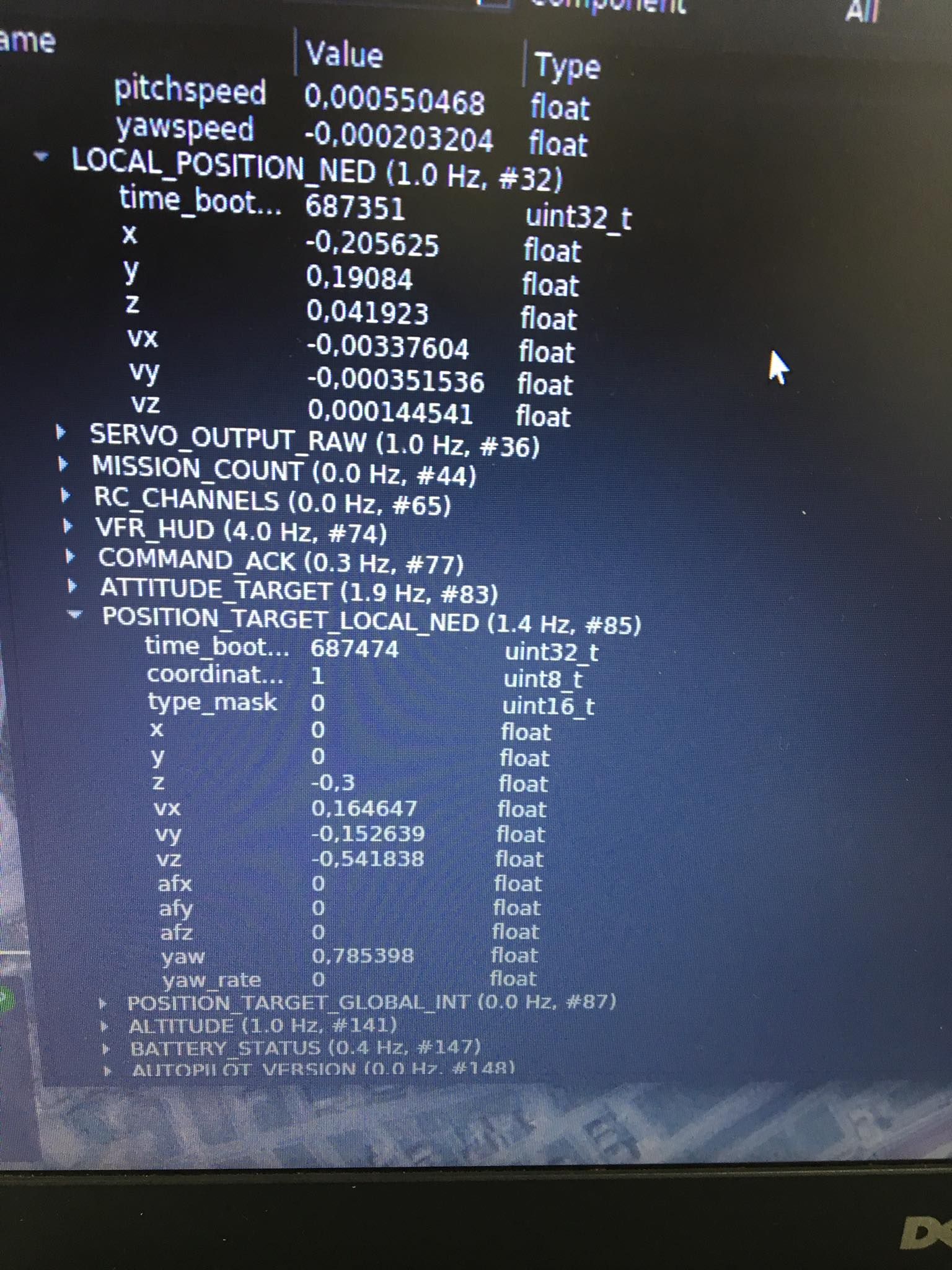
In my code, I set altitude is 0.3m and QGC show exactly (in POSITION_TARGET_LOCAL_NED) but m500 flew up to 0.5m, and sometime it sliped from home_position. Do you have any solution ??