@Alex-Kushleyev thank you so much for reaching out with support. I had to tear down the voxl2 setup and build out a pixhawk unit so I could complete thrust testing for our initial frame design. I will get the voxl2 model back up and running and test out your configuration. I actually don't think we have that cable. I'll have to put in order in for it. I'll post back with verification once I have the result.
M
mascenzi
@mascenzi
Posts
-
Attempting to get the motors spinning with no luck -
Attempting to get the motors spinning with no luckHello, I'll keep it simple. I'm just attempting to get the motors spinning at this point. Here is what I have and what I'm seeing.
Hardware:
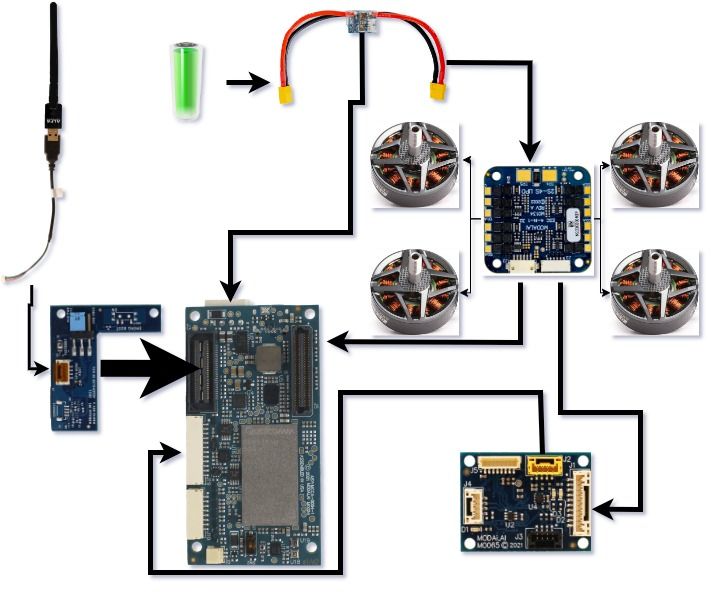
As you can see from the wiring this is my component list
- Voxl2
- 4in1 ESC
- Expander Board
- Power Module
- USB Expansion
- USB adapter for Wifi antenna
- Four T-Motor F90 motors
Software:
- QGroundControl Version 4.3
- Voxl
- System-image 1.7.1
- Kernel 4.19.125
- hw version m0054
- voxl-suite 1.1.0
- Packages
- voxl-px4 1.14.0-2.0.55
If you need any other version information, let me know and I'll update the OP.
I believe I have the VOXL2 configured for proper communication. If I run voxl-inspect-services, the following services are active.
- voxl-cpu-monitor Enabled Running
- voxl-imu-server Enabled Running
- voxl-mavlink-server Enabled Running
- voxl-portal Enabled Running
- voxl-px4 Enabled Running
- voxl-softap Enabled Running
- voxl-vision-hub Enabled Running
- voxl-wait-for-fs Enabled Running
When I run voxl-inspect-mavlink mavlink_to_gcs I see heartbeat and other informations update rates.
QGroundControl:
- Airframe - Quadrotor x
- Vehicle - Generic Quadcopter
- Firmware v. - 1.14.0
- CustomerFW ver. - 2.0.55
- Sensors:
* Gryo - Check
* Accelerometer - Check
* Level Horizon - Check
* Compas - Failed: No Mags found - Actuators Setup
* Configuration - VOXL ESC
I've worked through the Voxl Dev Bootcamp. I've also used the following links for reference.
Modalai: Using VOXL ESCs with PX4
PXF: Modalai VOXL 2Any help would be much appreciated.
-
Voxl 2 vs Voxl 2 Mini comparison and rotor configurationHello! I'm new to the forum and new to ModalAI as a whole. Working on a new project and I have a few questions related to the Voxl2 vs 2mini.
On both the Voxl 2 mini and the Voxl 2 product page they offer a comparison. For the most part they are identical components, ignoring the size differences. However, the main thing that jumps out at me is it shows that ROS1 & ROS2 appear to be available on the Voxl2, while the mini looks to have support for ROS2 alone. This differs from the documentation page which shows both models both supporting ROS1&2. I see no reason that the Mini couldn't support ROS1, so I was just looking for some clarification on that.
Quad vs Hexa rotor setups? Seeing how there is an integrated PX4 flight controller, am I correct that it would be possible to configure the setup for a variety of rotor configurations? Is there any limitations on the setup I could implement? Is there any documentation on setup/configuration associated with a non-quad orientation?
Thank you for your time I appreciate your insights.