Hello, we're currently using two Qualcomm rb5 flight drones, which were flashed with the new VOXL architecture. The purchase of the drones did not include any transmitter. My question is if there is any recommended spectrum transmitters to buy. The purpose of the drones is to use them for low level control for ML applications, so the controller would only be used for initial testing and as a safety backup.
Thanks in advance.
K
kham
@kham
Posts
-
RC Transmitter recommendations -
motor not responding to throttle@Alex-Kushleyev I was the first to use the drones after they were bought and after updating the drone and setting up the SDK the motor didn't work, so no there was no time were all the motors were working. Also we do not have a radio controller so all testing is done through Qgroundcontrol.
-
motor not responding to throttle@kham thank you for the reply, i ran the scan multiple times and was met with the same output. I ran the baud update but still got the same output. I tried to force install but it didn't work.
-
motor not responding to throttle@Alex-Kushleyev thank you for the clarification, i ran the code as instructed and the output is still consistent.
As for the blue LED's the forth one only flashes at the beginning for 1 second with the other LED's (when i plug-in the battery) after that they all turn off and then only 3 LED's continuously flash blue.
-
motor not responding to throttle@Alex-Kushleyev thank you for the response
-
When powering on the vehicle only 3 ESC channels flash blue and continuously maintain a fast flashing rate ( they do not flash slowly after the boot).
-
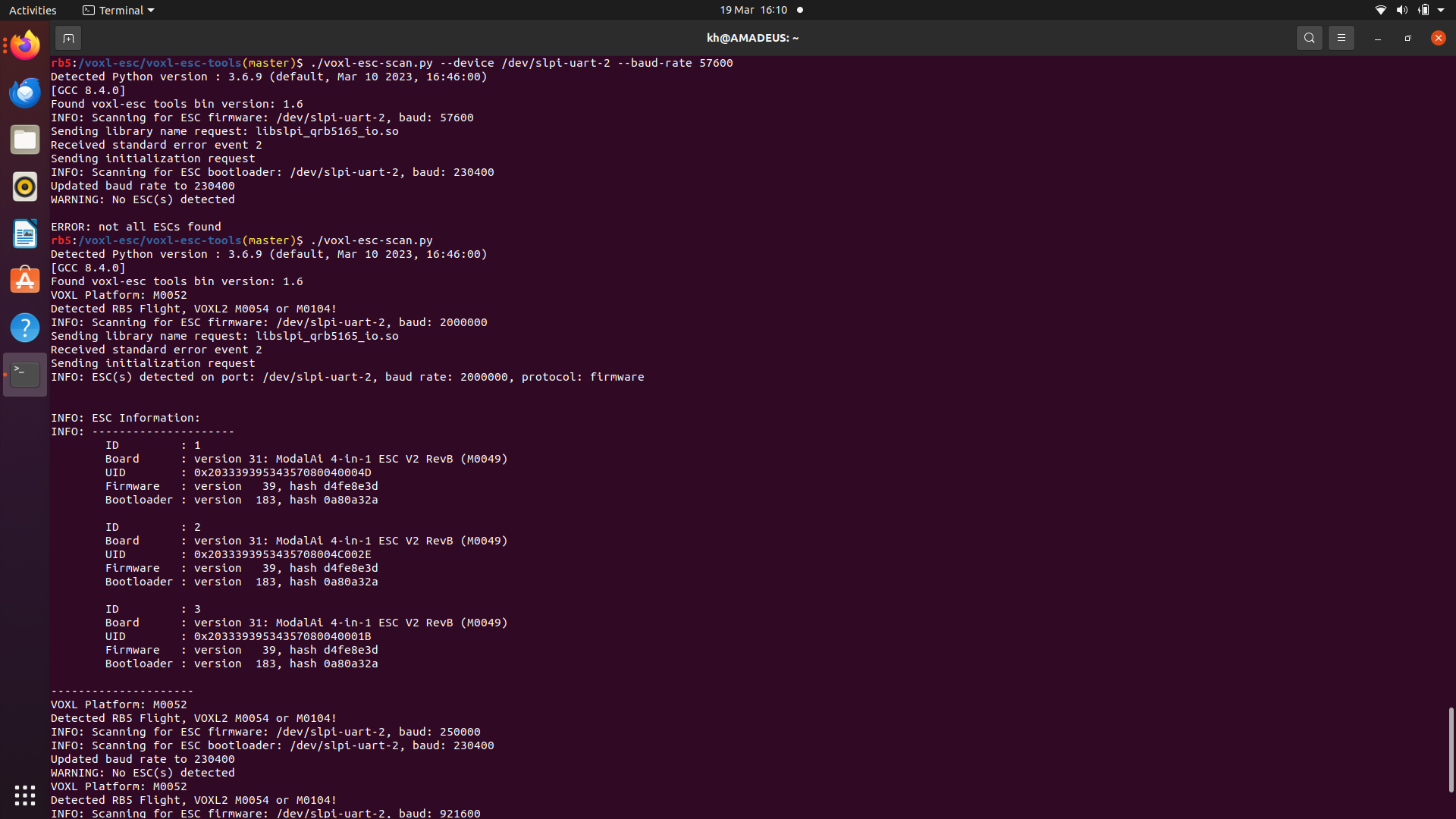
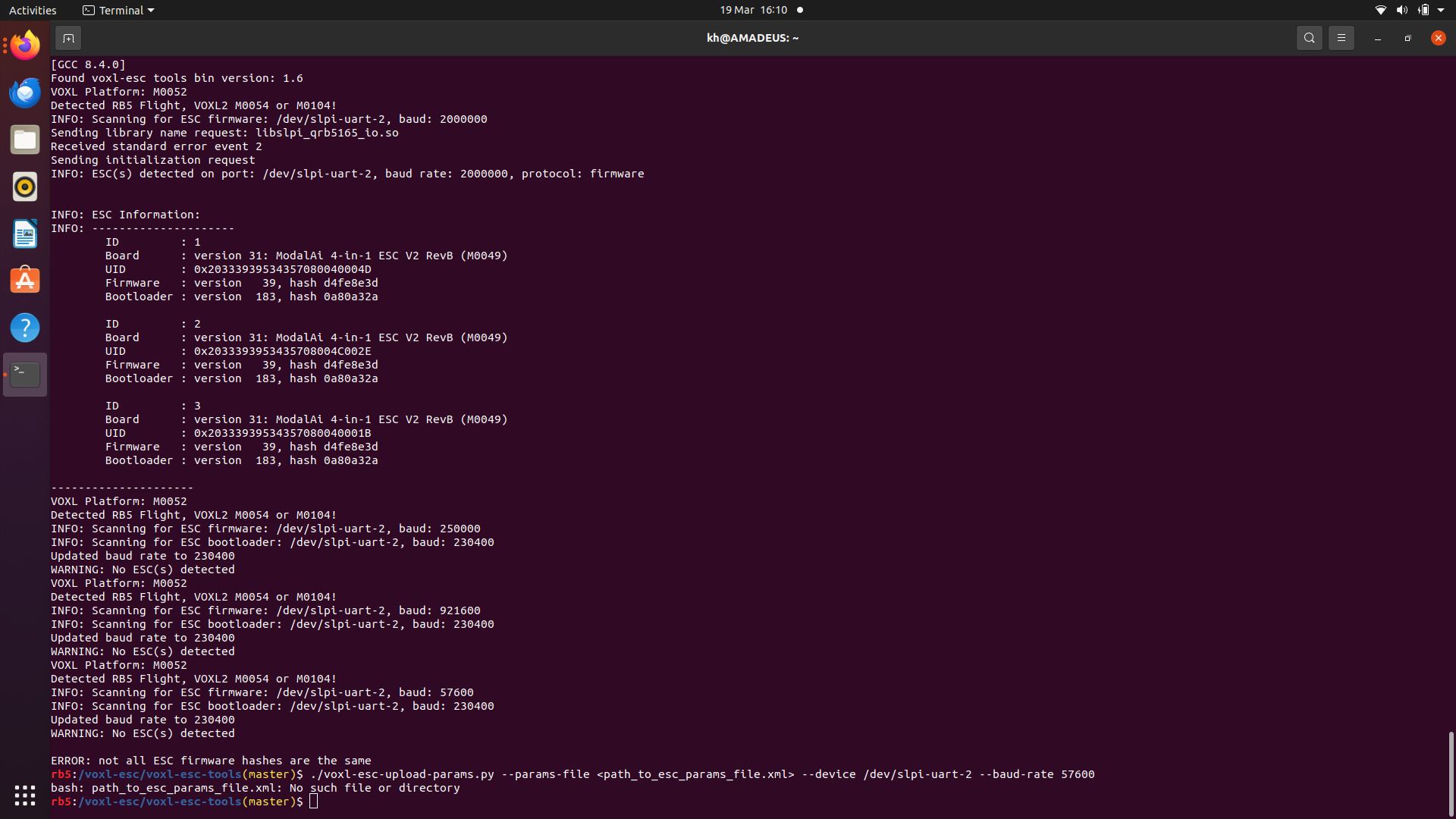
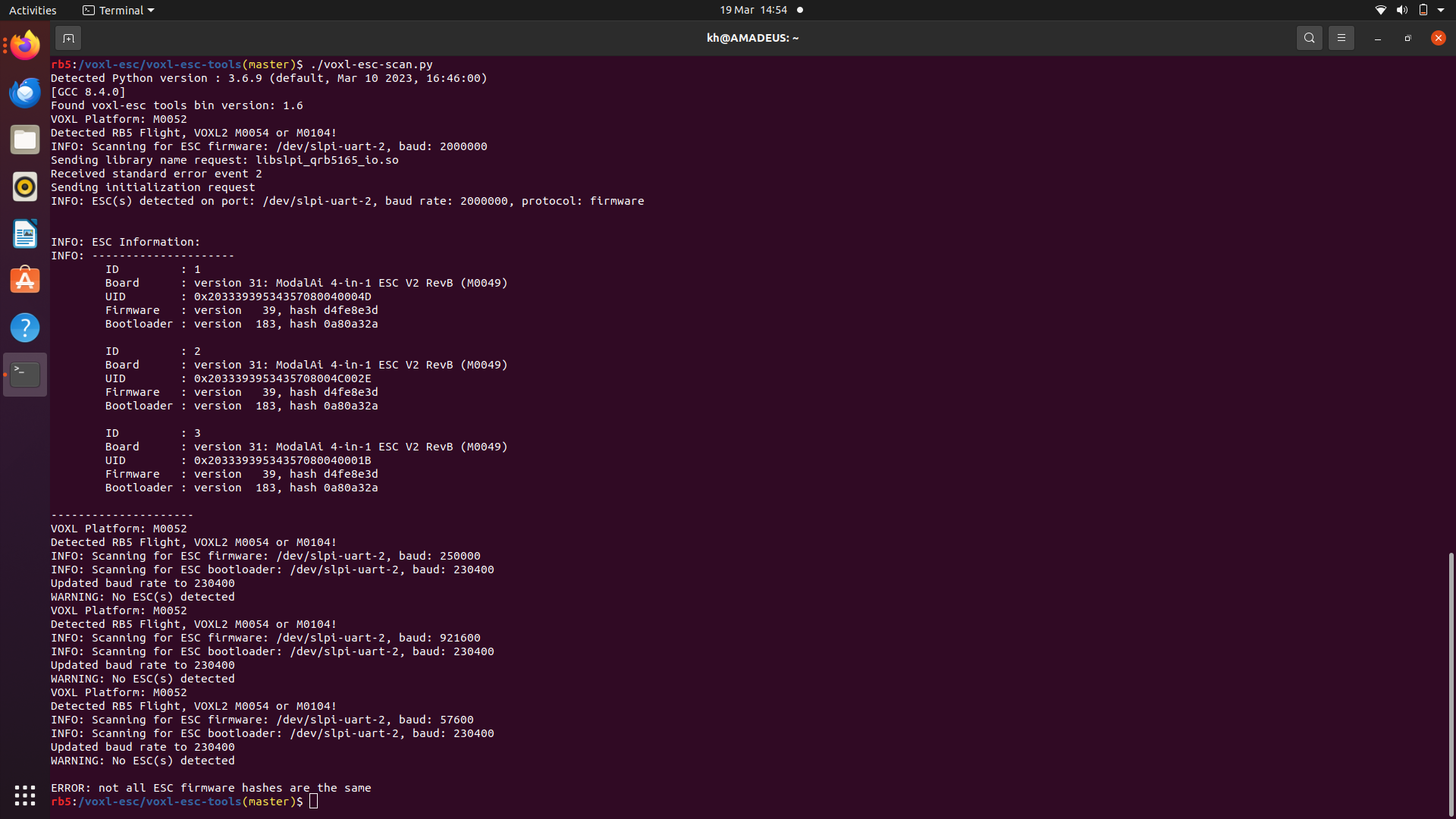
As you can see , i ran the recent versions of the voxl-esc tools pulled from the gitlab repo and the scan remains the same as before.
-
-
motor not responding to throttle@Alex-Kushleyev
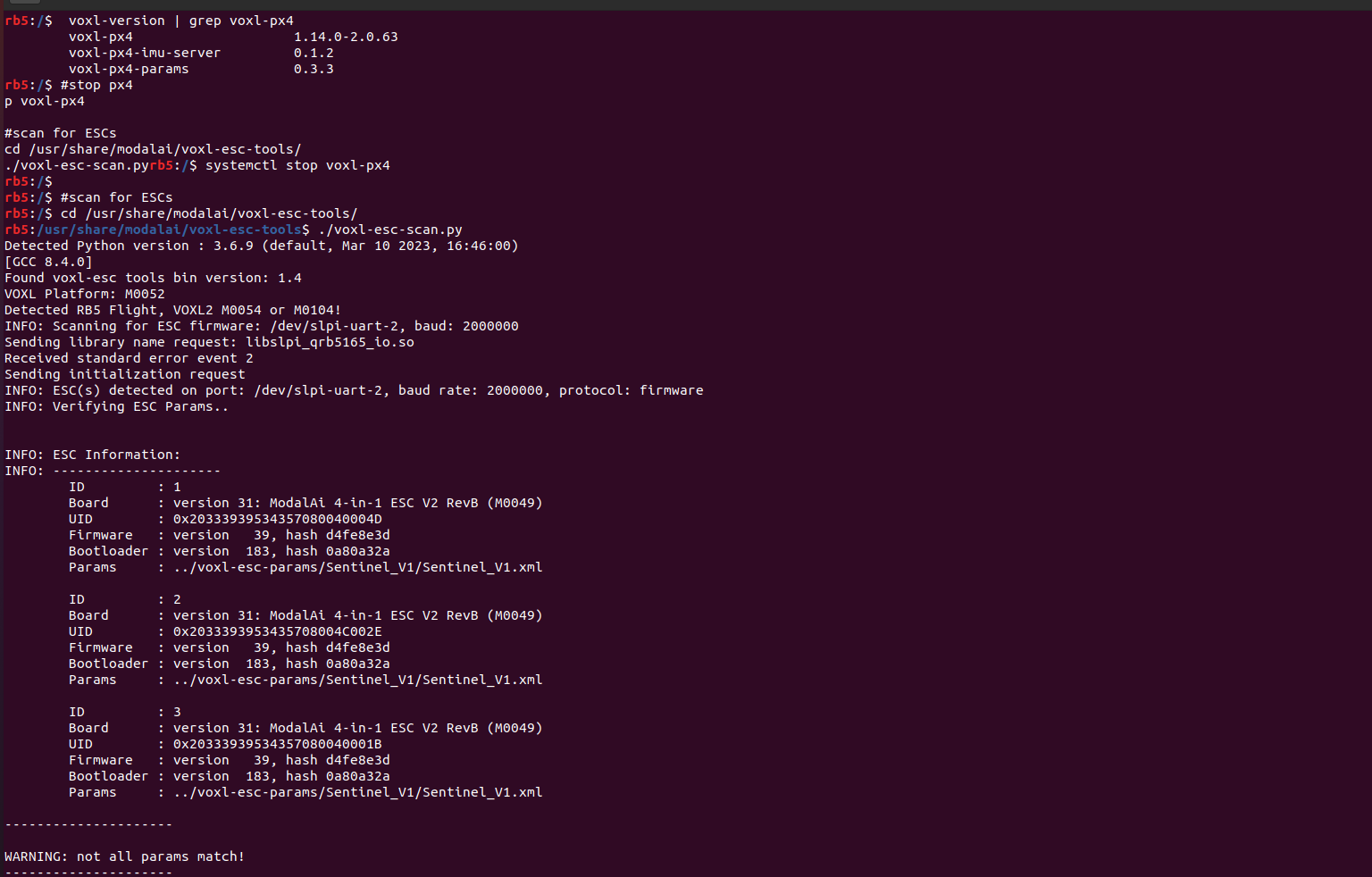
I ran the scan and it seems that one of the ESC's is not appearing on the scan. -
motor not responding to throttle@Moderatorthank you for the response, however as mentioned before I already followed the guide and both drones are already upgraded and running the latest version of the VOXL SDK released for the RB5 flight.
-
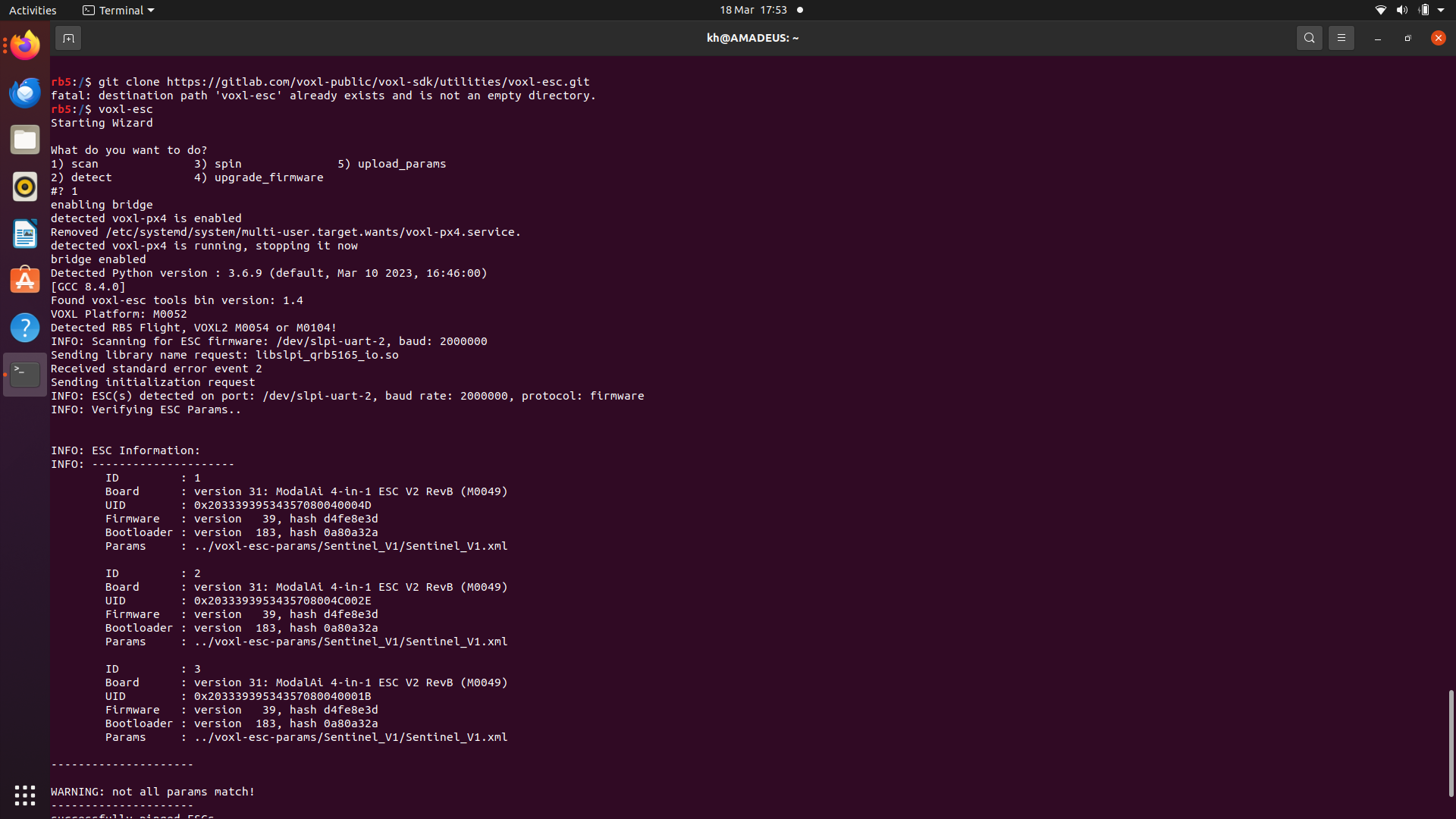
motor not responding to throttle@kham

This is the image showing no error count for the ESC's. -
motor not responding to throttle

Hello,
I am working on two "Qualcomm Flight RB5 5G Platform Drones Reference Design - Qualcomm Flight RB5 5G Drone w/o Modem", bought in march of 2022. They were no used until now. While setting them up I encountered some errors.
First of all I flashed both drones with the appropriate VOXL SDK as mentioned on the guide. After installing Qgroundcontrol I was conducting pre-flight tests and encountered problems with both drones:
-For the first drone, the LED on the GPS module is flashing red however no error is being detected on Qgroundcontrol and all VOXL services are working fine. I suspect this might be due to not having a RC remote and being unable to manually arm the drone but I am not sure. I am also getting a missing parameter message: "missing params: 1:SDLOG_MOD". Other than that the drone seems to be working fine.
-For the second drone however, it also exhibits the same problems as the first drone but it also has a motor failure. One of the motors is not responsive and exhibits no rotation at all when tests are conducted but no error arises on Qgroundcontrol. As shown in the attached images, while running a motor test one of the ESC's has an output of 0 in all parameters, but the servo output channel shows that they are all operating. Again as shown there is no error count or message displayed.