One of our M500 drones crashed recently. I could not find the link to buy spare parts for landing gear for M500 drone. Please provide the link
Jagatpreet Singh Nir
@Jagatpreet Singh Nir
Posts
-
m500 landing gear link -
Flash system image on new memory cardWe have a VOXL - M500 and sentinel drone and a VOXL flight deck as well. I want to flash the system image on new memory cards and keep two images to work on them separately. I am not sure how to flash the image on a new memory card. Can you please provide me the detailed steps to do that?
Thanks -
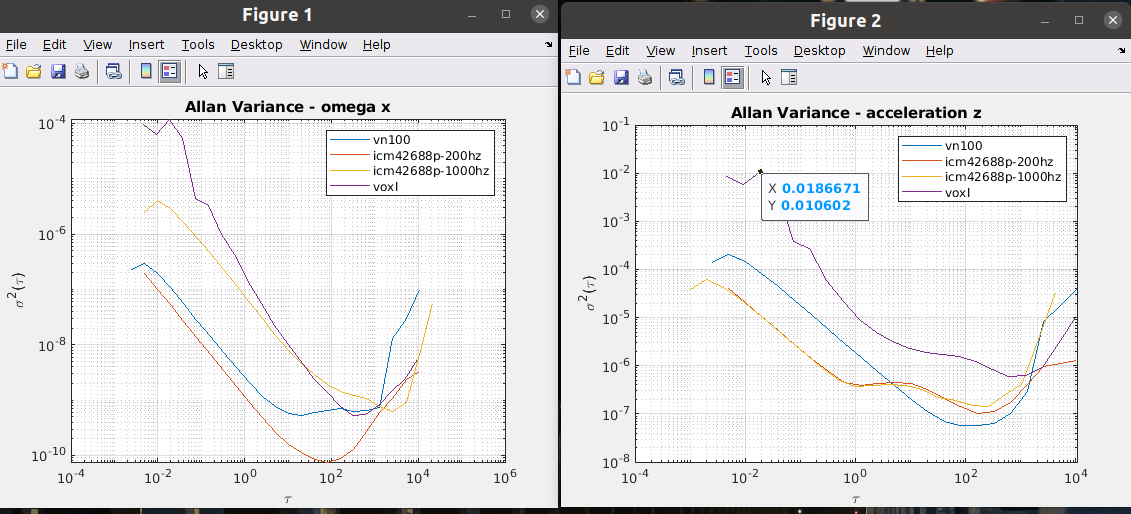
Difference in IMU characterization - 42688 p on voxlI was trying to understand the noise characteristics of the IMU - ICM 42688p on Modal AI M500 drone that has a VOXL board . I am trying to find the best IMU that I can use for my VIO application. I have another board with the same IMU - ICM42688p on it.
I collected stationary data for several hours on VOXL board and DK42688 board that I ordered and then plotted the allan deviation plot as shown in the figure. I am getting very different results for Allan deviation between VOXL and DK42688 board.
For comparison I also plotted Allan deviation of VN100 IMU (https://www.vectornav.com/products/detail/vn-100).Can someone explain why the VOXL-IMU0 has more noise? Are there any settings which need to be done so that I get a similar behavior from DK42688p board?
-
VOXL-2 Reject position control errorYes this fixed the issue. We are able to fly in position control mode indoors. Thanks!
-
cannot connect usb camera over USB - C adb portHere are dmesg logs in the google drive link:
There are two files; one when the usb device is plugged in to voxl 2 usb c port and then the second one when the same device is unplugged. -
VOXL-2 Reject position control errorWe are trying to run sentinel with voxl-2 in position control mode. We have calibrated the ESCs, all the sensors (compass, accel, gyro) and RC input. Even after all the calibration, we can fly in manual mode but the drone is unable to switch to position mode. The QGC outputs a log message saying Reject Position control. Our flight controller passes all the pre-flight checks for arming.
We suspect the cause is the following: In the MAV link inspector, we saw that the local NED position in z drifts by atmost of 20 centimeters. We also saw that the Odometery message seen in mavlink inspector does not drift at all and is equivalent to the values reported by voxl-qvio-inspector in local NED frame. We are unable to figure out how to get a stable local NED position in mavlink to align with the qvio.
or Is there anything else to configure to get into position control?
-
cannot connect usb camera over USB - C adb portI am using Flir Boson 640. The camera powers up however it is not detected as a device when I do lsusb.
We tried running the camera on the usb port used for wifi dongle. It works fine there.
We also tried to run an IMU on usb c port which has a much lesser power requirement ( 5V @ 200 mA). It did not run.
-
cannot connect usb camera over USB - C adb portI want to connect a usb 3.0 camera to the usb c port. After connecting, I am unable to see my device when I do lsusb. The camera powers up. I can login using the adb shell. So the usb c is working. I am not sure what settings need to be done to get my usb camera working with usb c.
