I was wondering where the two range finders are installed on the sentinel drone. From the documentation there should be 2 TDK CH-201 ultrasonic rangefinder sensors on the drone however, I couldn't find anymore information on where to read this data or their locations with respect to the drone. Are they indeed used on the drone or is this a miscommunication?
Erik Priest
@Erik Priest
Posts
-
Sentinel Drone Rangefinder -
GPS-Denied Indoor Flight@coreyazion I was able to switch to position flight mode and the drone flew better in position flight mode. In my previous testing I had issues with position flight mode with drifting but in my most recent attempt it flew much better and was relatively stable. I did experience after a short while some more drift towards the back-left of the drone however I am unsure if this is due calibration or configuration. I also experienced the same issue with PX4 Hold mode.
-
GPS-Denied Indoor FlightI've been having issues with flying the sentinel drone indoors with no-gps, in the following video link I fly the drone indoors and it seems to move towards the back of the drone. The flying is done in manual mode and only gave thrust commands except to avoid colliding with the walls. If there is any help that can be given for why it does this, if there is a calibration issue to a VIO issue. It also doesn't keep position in position or altitude mode. Any help or insight into the matter will be appreciated.
-
Charger for the Starling V2I was wondering if there was a recommended battery charger for the Starling V2 drone? I have purchased the drone charger listed on the forum post regarding a battery charger for the sentinel drone (https://forum.modalai.com/topic/2072/battery-charger-for-sentinel, link to charger https://www.amazon.com/Charger-Battery-Balance-Discharger-Adapter/dp/B07R18YNZQ/). However, it didn't have any connectors for XT30 plug. Will it be okay to get an XT60 F to XT30 M adapter to charge the battery given the aforementioned charger or is it recommended to buy a different charger all together?
-
Starling V2 voxl-configure-mpa fails to execute voxl-esc setup_starling_v2 and voxl-elrs --scan@tom The serial number is M2100000FT2, let know if its better to send as a private message if possible.
-
Starling V2 voxl-configure-mpa fails to execute voxl-esc setup_starling_v2 and voxl-elrs --scan@tom I have preformed the tasks and everything successfully ran. Where can I find the configuration files, is it available on the same download page as the sdk download?
-
Starling V2 voxl-configure-mpa fails to execute voxl-esc setup_starling_v2 and voxl-elrs --scanI had originally posted this in the Software Development topic in the forum however, I realized that it was the wrong location for this question so I have deleted the old topic and moved it over here.
VOXL VERSION:
-------------------------------------------------------------------------------- system-image: 1.6.2-M0054-14.1a-perf kernel: #1 SMP PREEMPT Fri May 19 22:19:33 UTC 2023 4.19.125 -------------------------------------------------------------------------------- hw version: M0054 -------------------------------------------------------------------------------- voxl-suite: 1.0.0 --------------------------------------------------------------------------------I am experiencing an issue with the VOXL 2 Starling V2 when I run the voxl-configure-mpa command I get the following output:
executing: voxl-esc setup_starling_v2 enabling bridge detected voxl-px4 is enabled Removed /etc/systemd/system/multi-user.target.wants/voxl-px4.service. detected voxl-px4 is running, stopping it now bridge enabled [INFO] Scanning for ESC... Received standard error event 2 Received standard error event 2 Couldn't configure flight_controller sensor Error calling voxl_uart_init Received standard error event 2 Received standard error event 2 Couldn't configure flight_controller sensor Error calling voxl_uart_init Received standard error event 2 Received standard error event 2 Couldn't configure flight_controller sensor Error calling voxl_uart_init Received standard error event 2 Received standard error event 2 Couldn't configure flight_controller sensor Error calling voxl_uart_init Received standard error event 2 Received standard error event 2 Couldn't configure flight_controller sensor Error calling voxl_uart_init Received standard error event 2 Received standard error event 2 Couldn't configure flight_controller sensor Error calling voxl_uart_init Received standard error event 2 Received standard error event 2 Couldn't configure flight_controller sensor Error calling voxl_uart_init Received standard error event 2 Received standard error event 2 Couldn't configure flight_controller sensor Error calling voxl_uart_init [ERROR] Unknown board detected: disabling bridge re-enabling voxl-px4 Created symlink /etc/systemd/system/multi-user.target.wants/voxl-px4.service → /etc/systemd/system/voxl-px4.service. restarting voxl-px4 bridge disabled EXITING VOXL-ESC WITH ERROR FAILED TO EXECUTE: voxl-esc setup_starling_v2And
executing: voxl-elrs --scan Traceback (most recent call last): File "/usr/bin/voxl-elrs", line 718, in <module> exit(scan()) File "/usr/bin/voxl-elrs", line 468, in scan sw_version = get_version() File "/usr/bin/voxl-elrs", line 456, in get_version get_device_info() File "/usr/bin/voxl-elrs", line 273, in get_device_info bytes_read = int(result.stdout.decode().split("\n")[-3]) ValueError: invalid literal for int() with base 10: 'Sending library name request: libslpi_uart_bridge_slpi.so' FAILED TO EXECUTE: voxl-elrs --scanAdditionally each time it seems that the Starling_V2.params have to be reloaded despite being set in the previous voxl-configure-mpa run:
The following parameters about to be loaded differ from those currently loaded: NAME CURRENT NEW [1] CBRK_IO_SAFETY N/A 22027 [2] CBRK_SUPPLY_CHK N/A 894281 [3] COM_CPU_MAX N/A -1 [4] COM_OF_LOSS_T N/A 3.0 [5] NAV_ACC_RAD N/A 2.0 [6] GPS_UBX_DYNMODEL N/A 6 [7] RTL_RETURN_ALT N/A 30 [8] RTL_DESCEND_ALT N/A 10 [9] IMU_GYRO_RATEMAX N/A 800 [10] SYS_AUTOSTART N/A 4001 [11] MAV_TYPE N/A 2 [12] SENS_BOARD_ROT N/A 0 [13] BAT1_N_CELLS N/A 2 [14] BAT1_R_INTERNAL N/A 0.025 [15] BAT1_CAPACITY N/A 2900 [16] BAT1_V_CHARGED N/A 4.0 [17] BAT1_V_EMPTY N/A 2.9 [18] BAT_LOW_THR N/A 0.15 [19] BAT_CRIT_THR N/A 0.10 [20] BAT_EMERGEN_THR N/A 0.05 [21] MPC_THR_HOVER N/A 0.35 [22] THR_MDL_FAC N/A 0.9 [23] MODAL_IO_RPM_MAX N/A 15000 [24] MODAL_IO_RPM_MIN N/A 3000 [25] MODAL_IO_FUNC1 N/A 101 [26] MODAL_IO_FUNC2 N/A 104 [27] MODAL_IO_FUNC3 N/A 102 [28] MODAL_IO_FUNC4 N/A 103 [29] MODAL_IO_SDIR1 N/A 0 [30] MODAL_IO_SDIR2 N/A 0 [31] MODAL_IO_SDIR3 N/A 0 [32] MODAL_IO_SDIR4 N/A 0 [33] MODAL_IO_BAUD N/A 2000000 [34] MODAL_IO_CONFIG N/A 1 [35] MODAL_IO_MODE N/A 0 [36] MODAL_IO_REV N/A 0 [37] MODAL_IO_T_COSP N/A 0.990000009536743164 [38] MODAL_IO_T_DEAD N/A 20 [39] MODAL_IO_T_EXPO N/A 35 [40] MODAL_IO_T_MINF N/A 0.150000005960464478 [41] MODAL_IO_T_PERC N/A 90 [42] MODAL_IO_VLOG N/A 1 [43] MC_BAT_SCALE_EN N/A 0 [44] EKF2_IMU_POS_X N/A 0.0157 [45] EKF2_IMU_POS_Y N/A 0.0078 [46] EKF2_IMU_POS_Z N/A -0.0180 [47] EKF2_EV_POS_X N/A 0.0 [48] EKF2_EV_POS_Y N/A 0.0 [49] EKF2_EV_POS_Z N/A 0.0 [50] CA_AIRFRAME N/A 0 [51] CA_ROTOR_COUNT N/A 4 [52] CA_ROTOR0_PX N/A 0.085 [53] CA_ROTOR0_PY N/A 0.0625 [54] CA_ROTOR1_PX N/A -0.085 [55] CA_ROTOR1_PY N/A -0.0625 [56] CA_ROTOR2_PX N/A 0.085 [57] CA_ROTOR2_PY N/A -0.0625 [58] CA_ROTOR3_PX N/A -0.085 [59] CA_ROTOR3_PY N/A 0.0625 [60] CA_ROTOR0_AX N/A 0.0 [61] CA_ROTOR0_AY N/A 0.0 [62] CA_ROTOR1_AX N/A 0.0 [63] CA_ROTOR1_AY N/A 0.0 [64] CA_ROTOR2_AX N/A 0.0 [65] CA_ROTOR2_AY N/A 0.0 [66] CA_ROTOR3_AX N/A 0.0 [67] CA_ROTOR3_AY N/A 0.0 [68] CA_ROTOR0_KM N/A 0.05 [69] CA_ROTOR1_KM N/A 0.05 [70] CA_ROTOR2_KM N/A -0.05 [71] CA_ROTOR3_KM N/A -0.05 [72] MOT_SLEW_MAX N/A 0.0 [73] IMU_DGYRO_CUTOFF N/A 80.0 [74] IMU_ACCEL_CUTOFF N/A 80.0 [75] IMU_GYRO_CUTOFF N/A 150.0 [76] IMU_GYRO_DNF_EN N/A 1 [77] IMU_GYRO_DNF_HMC N/A 3 [78] IMU_GYRO_DNF_BW N/A 15 [79] MC_AIRMODE N/A 0 [80] MC_PITCH_P N/A 12.0 [81] MC_PITCHRATE_P N/A 0.08 [82] MC_PITCHRATE_I N/A 0.15 [83] MC_PITCHRATE_D N/A 0.0006 [84] MC_PITCHRATE_K N/A 1.0 [85] MC_ROLL_P N/A 12.0 [86] MC_ROLLRATE_P N/A 0.065 [87] MC_ROLLRATE_I N/A 0.15 [88] MC_ROLLRATE_D N/A 0.0005 [89] MC_ROLLRATE_K N/A 1.0 [90] MC_YAW_P N/A 2.8 [91] MC_YAWRATE_P N/A 0.15 [92] MC_YAWRATE_I N/A 0.5 [93] MC_YAWRATE_D N/A 0.0 [94] MC_YAWRATE_K N/A 1.0 [95] MC_ROLLRATE_MAX N/A 150.0 [96] MC_PITCHRATE_MAX N/A 150.0 [97] MC_YAWRATE_MAX N/A 150.0 [98] MPC_POS_MODE N/A 4 [99] MPC_YAW_EXPO N/A 0.30 [100] MPC_XY_MAN_EXPO N/A 0.45 [101] MPC_Z_MAN_EXPO N/A 0.10 [102] MPC_ACC_HOR N/A 3.0 [103] MPC_JERK_MAX N/A 40.0 [104] MPC_TILTMAX_AIR N/A 30.0 [105] MPC_ACC_HOR_MAX N/A 6.0 [106] MPC_ACC_UP_MAX N/A 3.0 [107] MPC_ACC_DOWN_MAX N/A 3.0 [108] MPC_VEL_MANUAL N/A 3.0 [109] MPC_XY_VEL_MAX N/A 3.0 [110] MPC_XY_CRUISE N/A 3.0 [111] MPC_Z_VEL_MAX_DN N/A 1.0 [112] MPC_Z_VEL_MAX_UP N/A 1.0 [113] MPC_LAND_SPEED N/A 1.0 [114] MPC_THR_MAX N/A 0.70 [115] MPC_THR_MIN N/A 0.08 [116] MPC_MANTHR_MIN N/A 0.08 [117] MPC_XY_P N/A 3.50 [118] MPC_XY_VEL_P_ACC N/A 3.00 [119] MPC_XY_VEL_I_ACC N/A 0.10 [120] MPC_XY_VEL_D_ACC N/A 0.00 [121] MPC_Z_P N/A 5.0 [122] MPC_Z_VEL_P_ACC N/A 8.0 [123] MPC_Z_VEL_I_ACC N/A 2.0 [124] MPC_Z_VEL_D_ACC N/A 0currently.0 [125] MPC_TKO_RAMP_T N/A 2.00 [126] MPC_TKO_SPEED N/A 1.50 [127] COM_SPOOLUP_TIME N/A 1.0 [128] LNDMC_ROT_MAX N/A 30.0 [129] COM_DISARM_LAND N/A 0.1 [130] COM_DISARM_PRFLT N/A 20 [INFO] Setting params... [INFO] Px4 parameter configuration successful!What I have done to fix the issue:
-
apt update && apt upgrade
-
disabled voxl-px4 and rebooted before running voxl-configure-mpa again and same result
I'm not sure how to fix this issue and would appreciate any help. I am concerned that if I attempt to fly the drone it will fail due to the configuration failing.
*Side Note: QGroundControl also does not work
Edit 1:
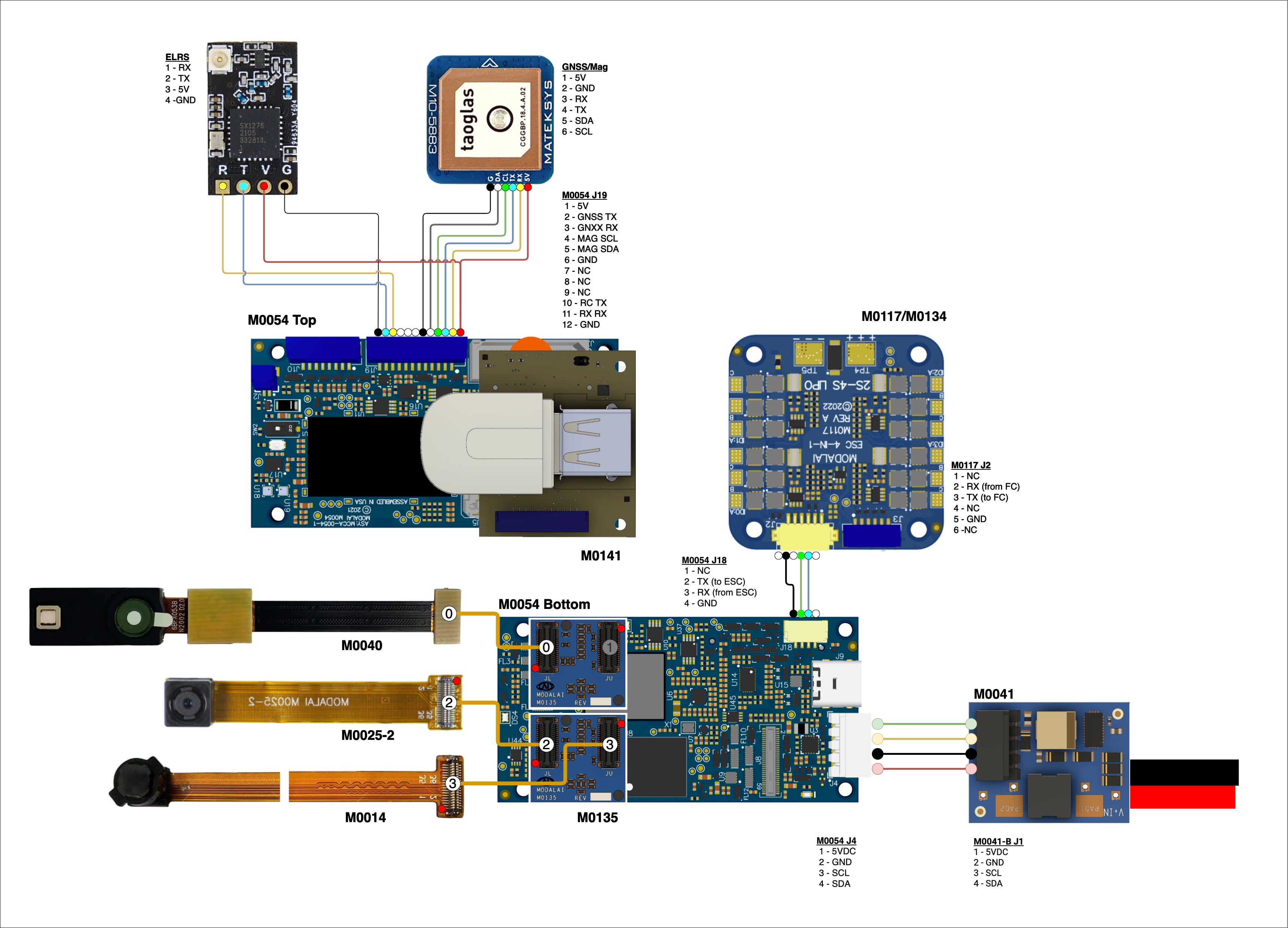
My post has been partially answered by this post https://forum.modalai.com/topic/2805/voxl-configure-mpa-failled-on-voxl-esc-step as they are experiencing the same issues I am having at each step. However, in addition to their problem the voxl-elrs --scan does not work for me. However the cables look like they are all present based on the provided diagram https://docs.modalai.com/images/starling-v2/D0005-compute-wiring-d.jpg. -
{kind=link}