Hello,
Is it possible to detach qvio camera and move It 5/10 cm below voxl1 body ?
Can It affect qvio performance in negative way? I would also like to find out whether the vibrations only affect the IMU or the camera as well.
D
droen8
@droen8
Posts
-
Detaching voxl camera -
Masking qVio@Alex-Kushleyev said in Masking qVio:
P5
160 120
255
^@^@^@^@^@^@^It is working now thanks. I have created mask in monochrome bmp and then used online tool to convert it into pgm but output had wrong header:
P5 160 120 1 ^@^@^@^@^@^@^I have used gimp now and exported with .pgm (binary) and it's working

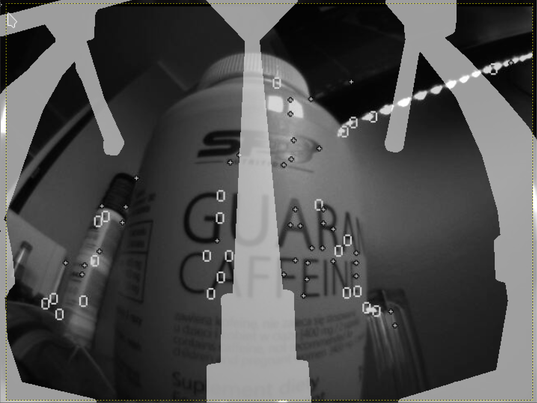
I put a preview mask on output image.
-
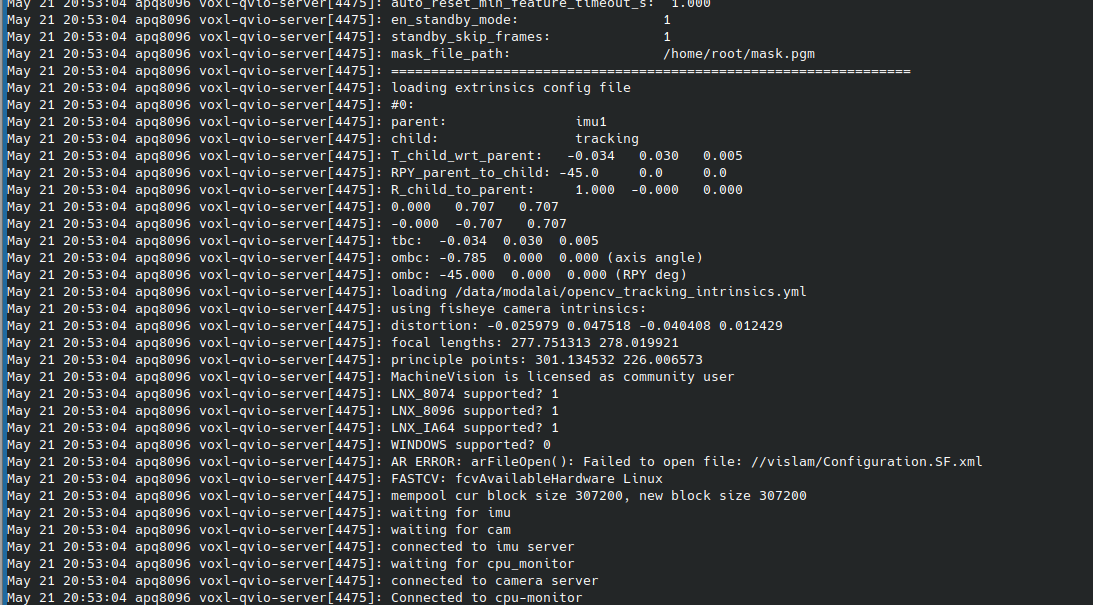
Masking qVio@Alex-Kushleyev It is not complaining about mask opening fail now but It is still not working:

Voxl is stationary and I have tried reseting qvio:

//edit the relativity of a path was due to me running voxl-qvio-server from there. When I run It as a service It is using absolute paths now. But still not working with repository example mask nor with my own mask.
-
Masking qVio@Alex-Kushleyev thank you, I have not noticed that init function is wrapped. Now I can see that path is relative to /home/root
I will try in few if it's working but it will for sure
") There is another error with Configuration.SF.xml should I have It in mind?
There is another error with Configuration.SF.xml should I have It in mind? -
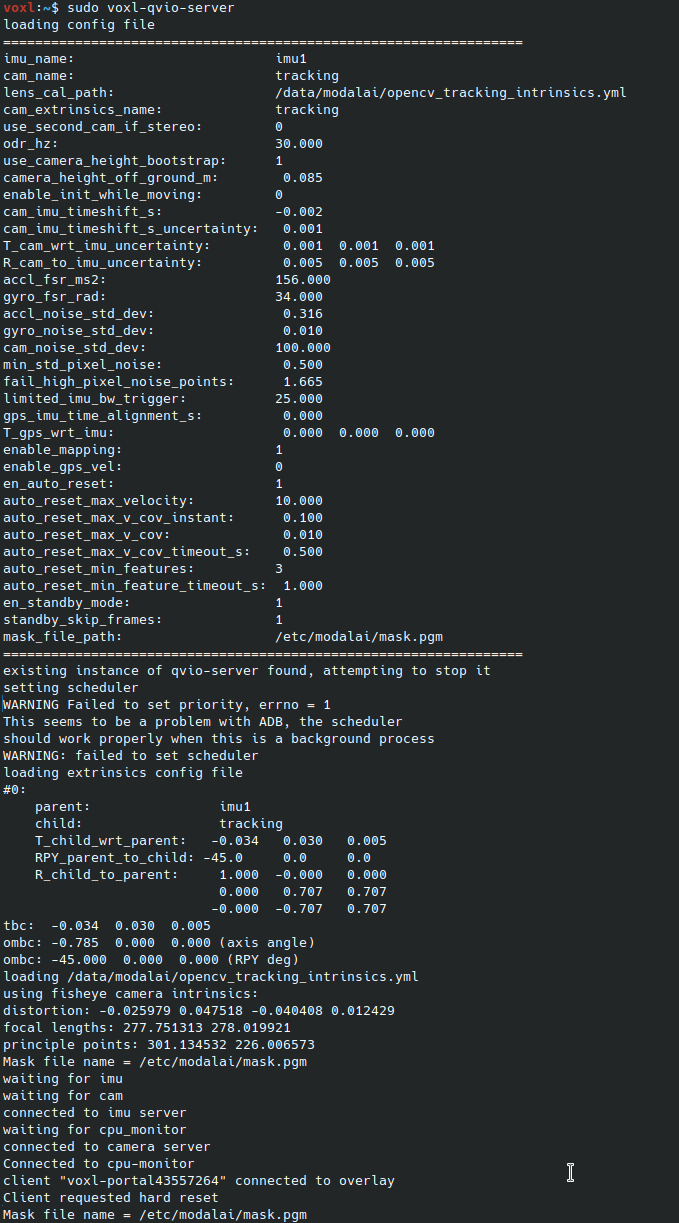
Masking qVio@Alex-Kushleyev
Yes I have tried multiple times, the screenshoot was taken after few restarts of voxl-qvio-server. It's for sure not using a mask.
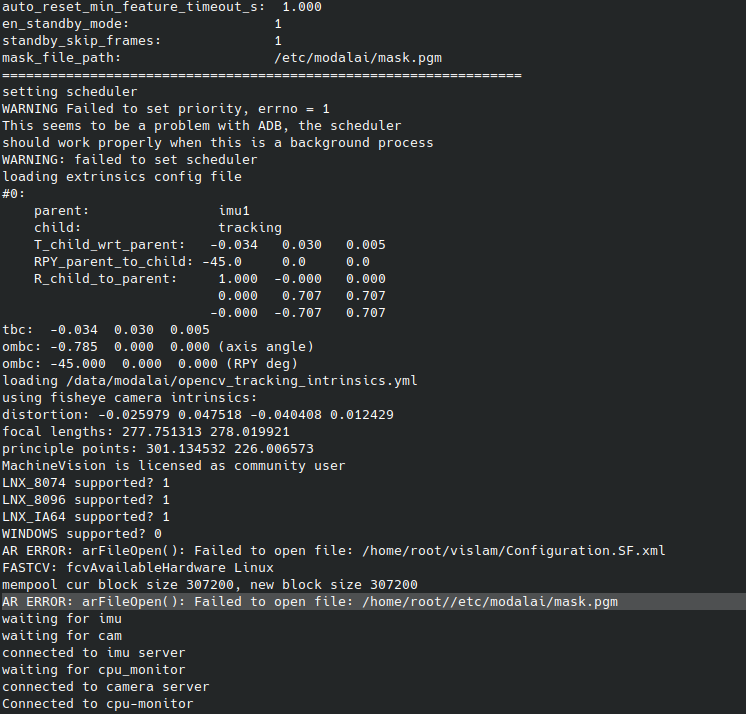
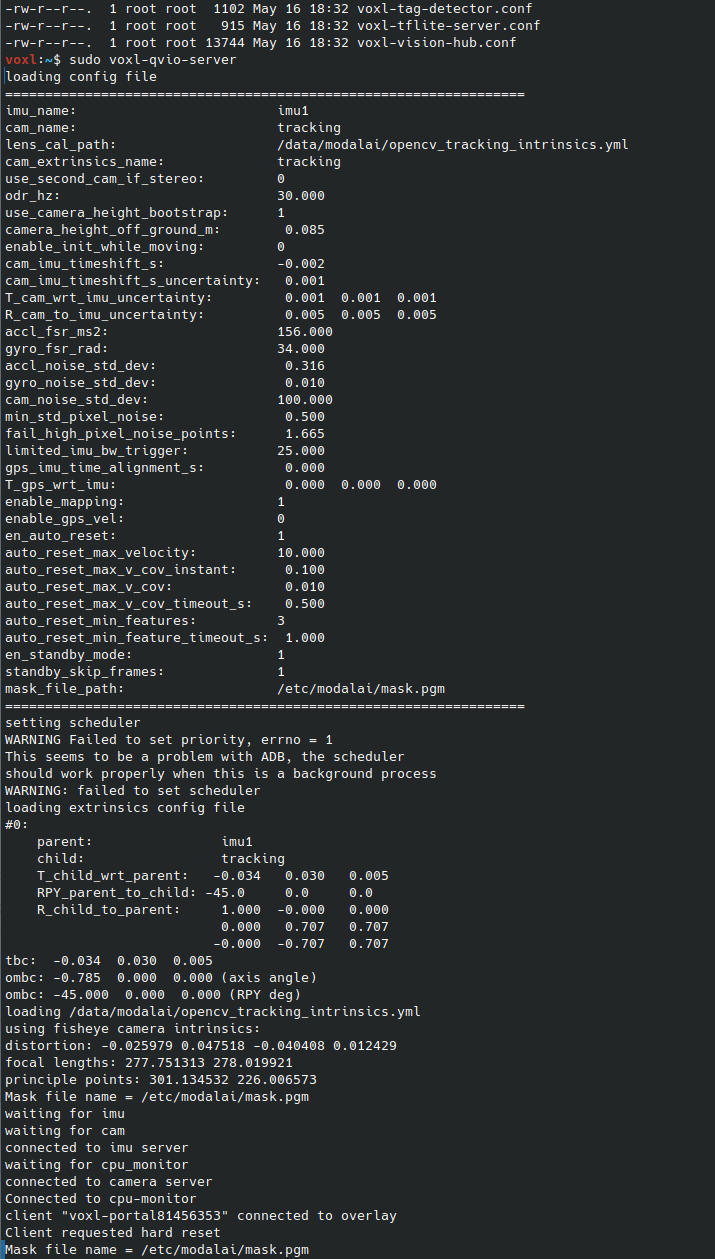
I have tried renaming mask and I have not seen any errors when mask do not exist in provided path. I have tried to displayprintf("Mask file name = %s \n", staticMaskFileName);in _hard_reset function and the path is displayed properely. I do not have idea how can I debug this issue.With existing file in
mask_file_path:
Renamed file:
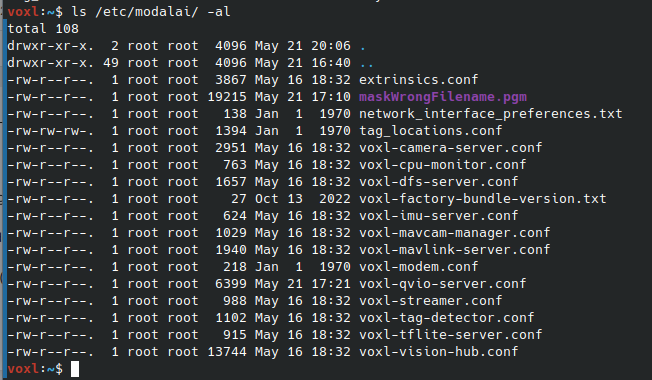
After renaming to ...maskWrongFilename.pgm :
-
Masking qVioHi @Alex-Kushleyev,
I am using ov7251 for tracking. I think I have made everything as described but it's still not working.
https://ibb.co/XyDGG7w
https://ibb.co/WkSDC2V
https://ibb.co/6X5N6YVRegards
-
Masking qVioHello Voxl Team,
During testing my drone prototype which has about 2m diameter I've seen that the VIO seems to be detecting features on the drone arms etc. what makes loss of VIO quality by sticking points on a moving drone through the tracking sensor.
In that case I've decided to mask disturbing elements to let the computing power takes place in free space out of the drone.
I have tried to add mask trough config as this changes suggest https://gitlab.com/voxl-public/voxl-sdk/services/voxl-qvio-server/-/commit/c20b35e19f8fb289d272877648fd77e1afc7810c but It's not working I have used example mask I put in /etc/modalai/mask.pgm. I have tried to hardcode mask file path in code and rebuild voxl-qvio-server but without success.

Upload Image — Free Image Hosting
Free image hosting and sharing service, upload pictures, photo host. Offers integration solutions for uploading images to forums.

ImgBB (ibb.co)
Regards
-
Error NOT_STATIONARY has occured during the flight.Hello LaborzaubererTHI,
You can see the video now as it has been set as unlisted.

ModalAI VoxlCam testing vibrations on accel and gyr
Enjoy the videos and music you love, upload original content, and share it all with friends, family, and the world on YouTube.

YouTube (www.youtube.com)
Sorry for that.
Regards
-
Error NOT_STATIONARY has occured during the flight.Hello Voxl Team,
I've checked the vibrations during 15 min flight and it seems like they occur on accelerometer as it's reflected on the video. Please let me re-model my Voxlcam holder and get back to you.
Or.. Is there any other potential issue why those vibrations occurred. Gyro XYZ is stable however accel has them too much.
ModalAI VoxlCam testing vibrations on accel and gyr
Enjoy the videos and music you love, upload original content, and share it all with friends, family, and the world on YouTube.
YouTube (www.youtube.com)
Regards
-
Error NOT_STATIONARY has occured during the flight.Hello,
I've tried to test your voxl cam for the first time, first of all I've tried to leave a drone in the same position 2 metres above the ground for approx.15 minutes, drone held position very smooth and stable, nothing occured during this operation. Then I've decided to fly a little bit higher above the tree and unfortunetly I got some errors which forced that my drone switched from loiter mode to land mode as a failsafe. Furthermore situation appeared in the same way everytime when I've tried to fly above tree, which during the flight has a lot of moving points (like branch or leaves). Can you advise what could be a potential cause for above behaviour.
Below I attach link which reflects exact case.
https://www.youtube.com/watch?v=b_4IsZeIQas (Error starts at 1;40 min )Also.. You can see in the log that during the failsafe visio odometry cut down
https://imgur.com/a/6DwytzShttps://drive.google.com/drive/folders/1BW4fhUM0Chb7pPKDekNavZtCjvXJfTE_ (All logs and videos are contained here)
FYI I am using ardupilot software