Hi,
Am planning to install ros realsence camera driver package on voxl docker image. I have tried to install directly as creating ros workspace on docker image and git installed realsense driver package as similar to documentation provided for installing tof sensor (https://docs.modalai.com/build-ros-nodes-for-voxl/) . But when i tried to compile the ros package on docker image, its throwing errors and unable to install ros dependencies using "sudo apt-get install ros-kinetic****" on terminal. I wish to know about how to install new ros packages on voxl docker image.
D
Darshan
@Darshan
Posts
-
Realsense driver installation on docker image -
Stereo camera point cloudHi @Alex-Gardner,
I followed to tune params which you suggested in above, but still am not able get optimal dense pointcloud points. Is there any alternative approach in need to follow or i need combine any other depth sensor along with existing stereo. image url).
image url). -
Stereo camera point cloudHi,
Any suggestions for resolving this issue! -
Stereo camera point cloudHi @Alex-Gardner,
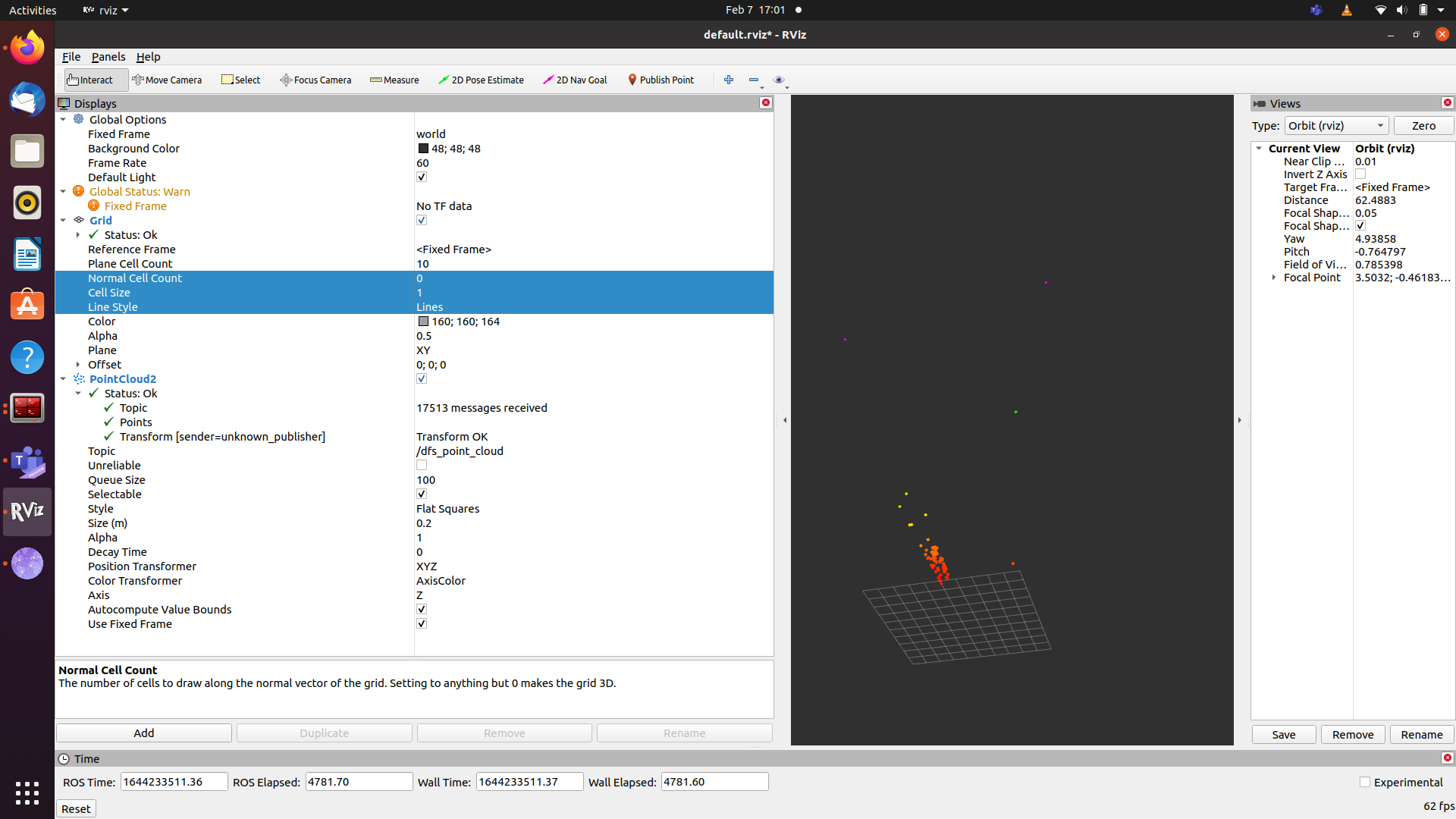
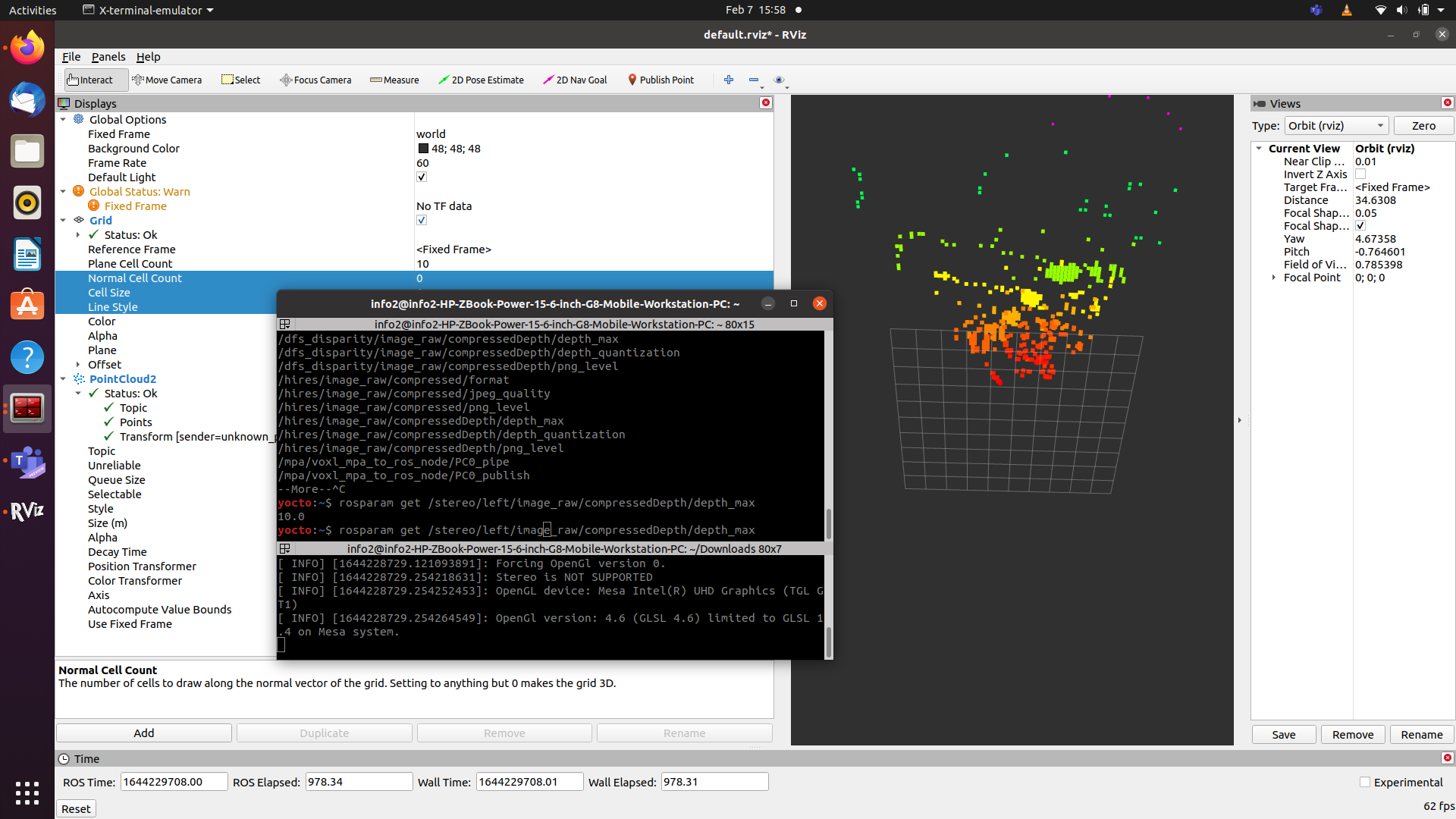
Am using ModalAI 3.3.0 version. I have connected my voxel camera kit with ros & able to visualise dfs_disparity/image_raw topic, stereo_left/image_raw, dfs_pointcloud topics data on Rviz. I have placed a obstacle in front of camera & at same time i tried visualise obstacle data on /dfs_disparity/image_raw topic. Observed that the data appears on dfs_disparity/image_raw topic was not clear and may due to this am getting very low density pointcloud points on /dfs_pointcloud topic. I have attached the rviz images which have taken during experiment.(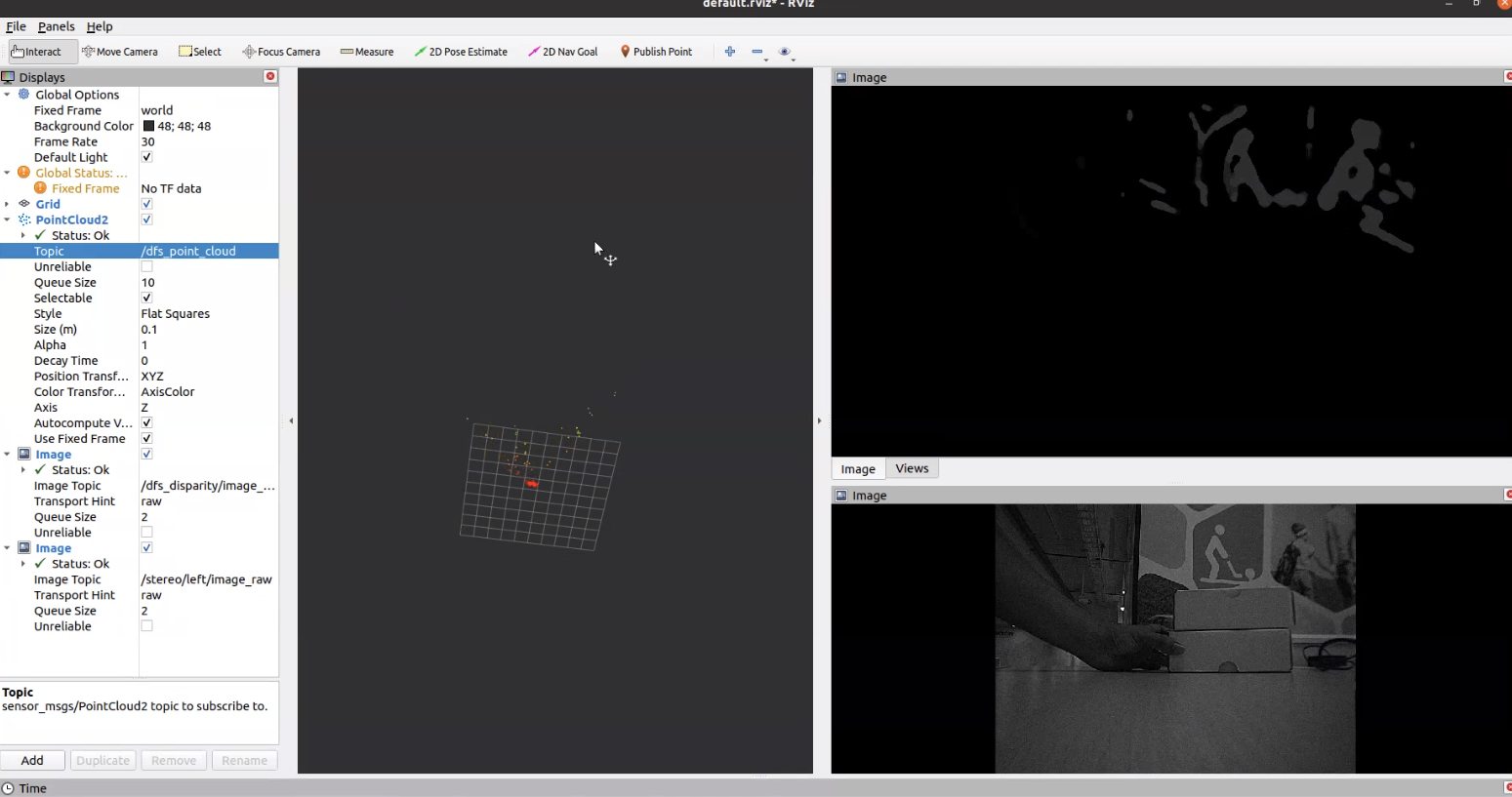
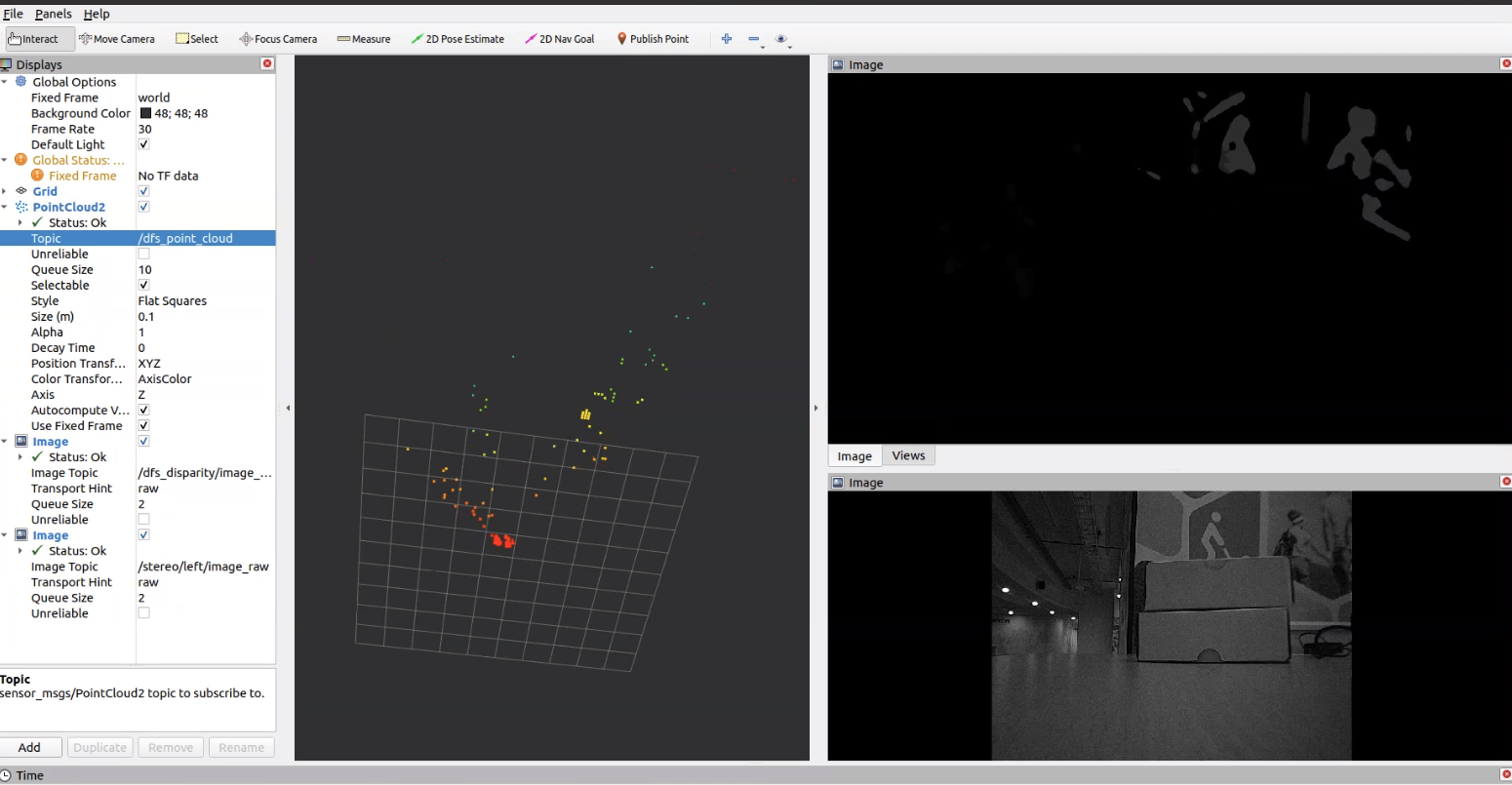 image url)
image url) -
Stereo camera point cloudHello @Matt-Turi ,
I am facing the same issue, am unable to get dense pointcloud data on /dfs_pointcloud rostopic. I tried to visualize detected object point cloud data on rviz, but the point cloud data coming on /dfs_pointcloud was not dense and clear. I tried the same approach for different physical dimensions of objects. Still data coming on rostopic is not clear. I have attached the raw images which have been taken during the process. Suggest me if i need to tune any params or need to follow any different installation instructions.