@Alex-Kushleyev All indoor flights have been done in manual mode. Several of the above plots also show manual mode.
Most outdoor flights have been done in position mode, but both position and manual flights have recently been attempted unsuccessfully outdoors.
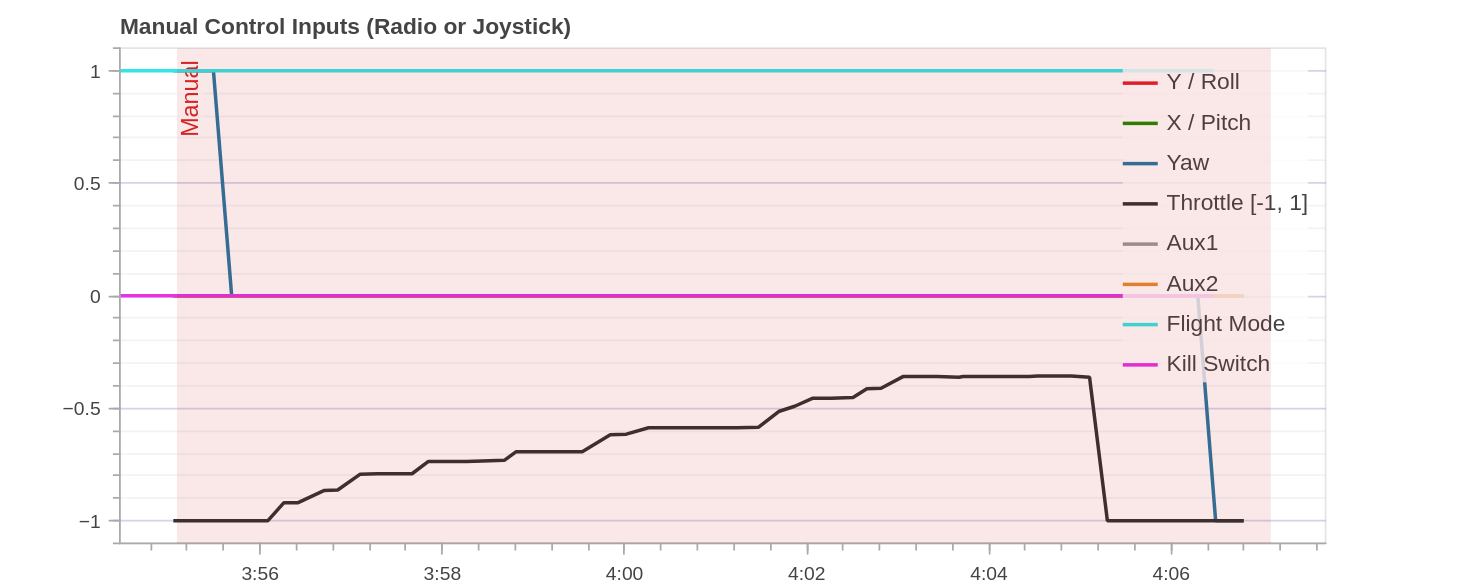
In the plots, you can see the RC commands include no yaw or roll commands, only throttle increase. I cannot find any reason that the ESC signal is so low?
Latest posts made by Cody
-
RE: Seeker failing to take off after several successful flightsposted in Seeker
-
RE: Seeker failing to take off after several successful flightsposted in Seeker
@Alex-Kushleyev
One of my colleges tested the Seeker again. He managed to have a smooth take off, but shortly after it begin to drift to the left very hard making landing very difficult. The flight was at most several seconds long. -
RE: Seeker failing to take off after several successful flightsposted in Seeker
I have attached several plots from flight review. It has more plot able variables than PlotJuggler.
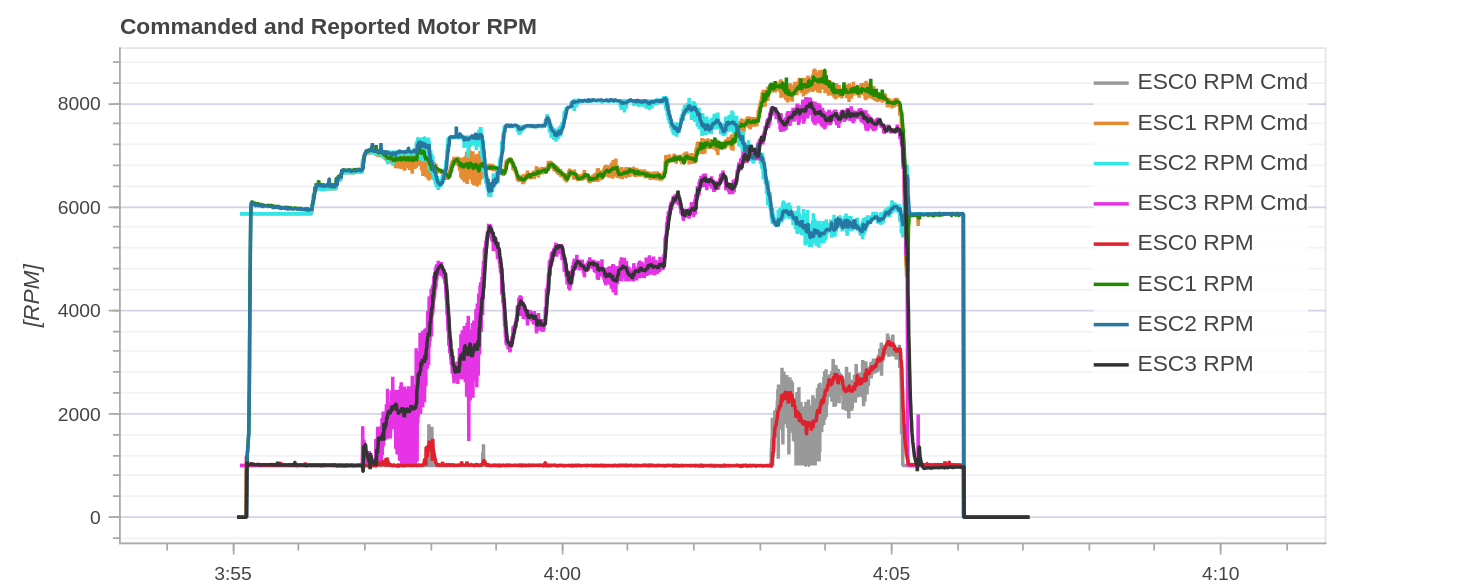
It does not seem that the RPMs are being commanded very high, which is confusing.
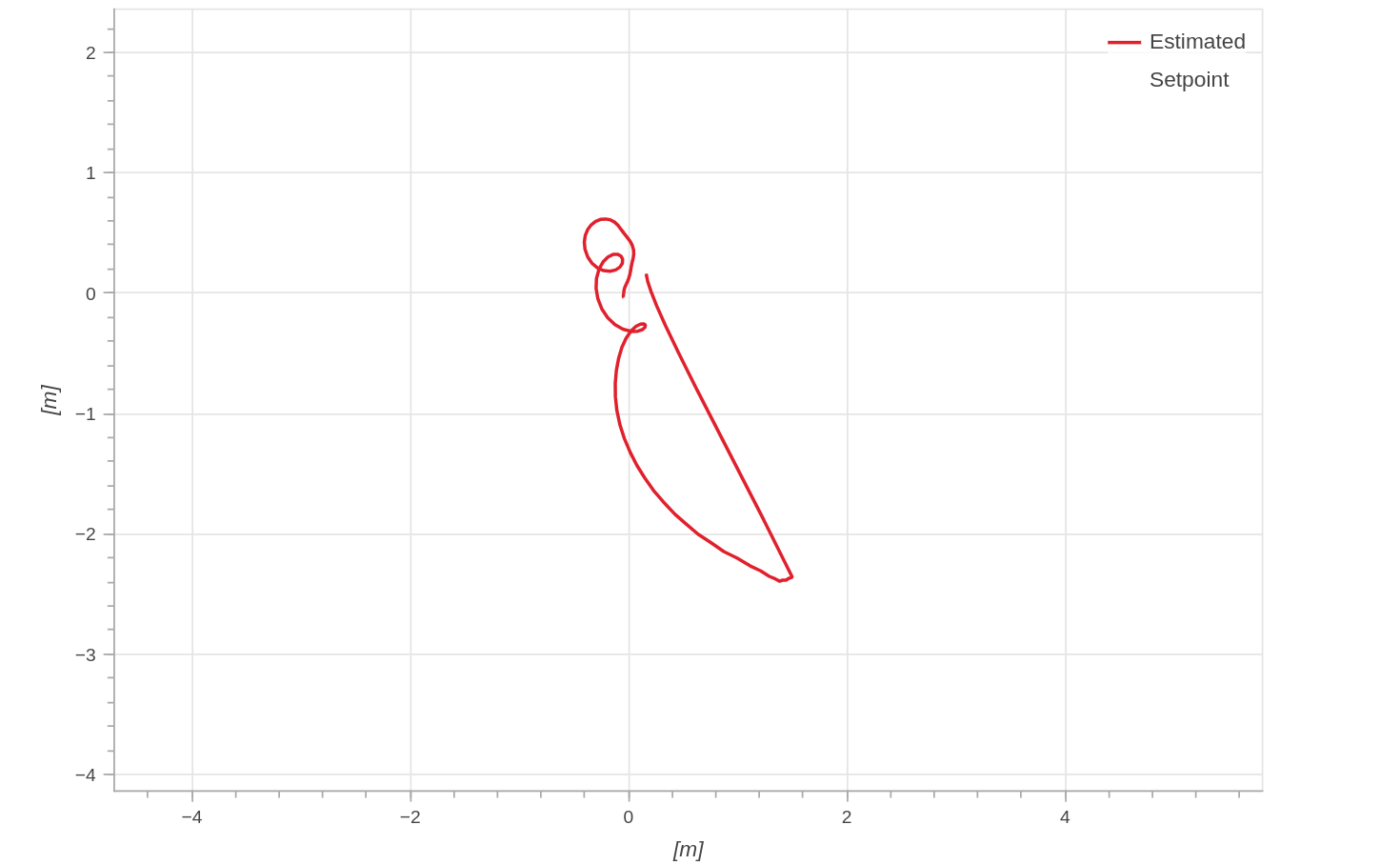
The X Y Z set points and estimates are far off though.Thoughts?
-
Seeker failing to take off after several successful flightsposted in Seeker
I have had several successful flights with our Seeker. No hardware or software changes.
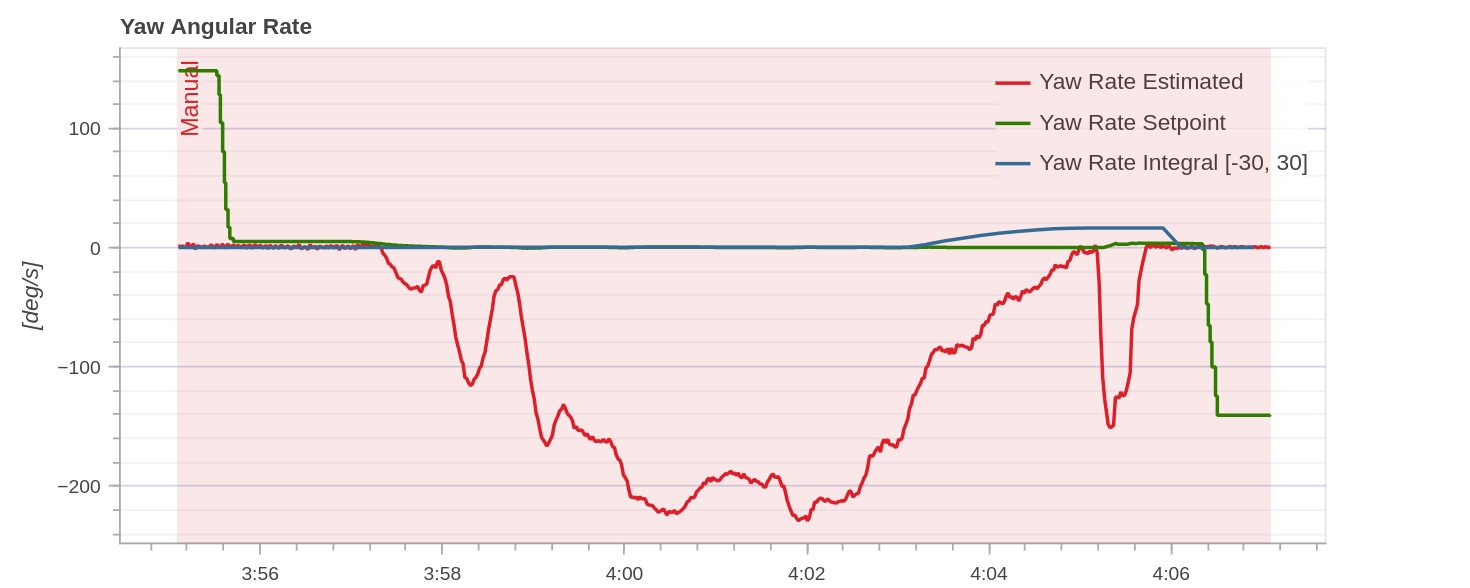
Last several attempts (spaced out over a week) have failed. The front left landing gear never leaves the ground. When the throttle is pushed to 75% in manual mode the Seeker will start to spin in circles around the front left motor.
I have pulled PX4 ULG logs and plotted them with PlotJuggler.
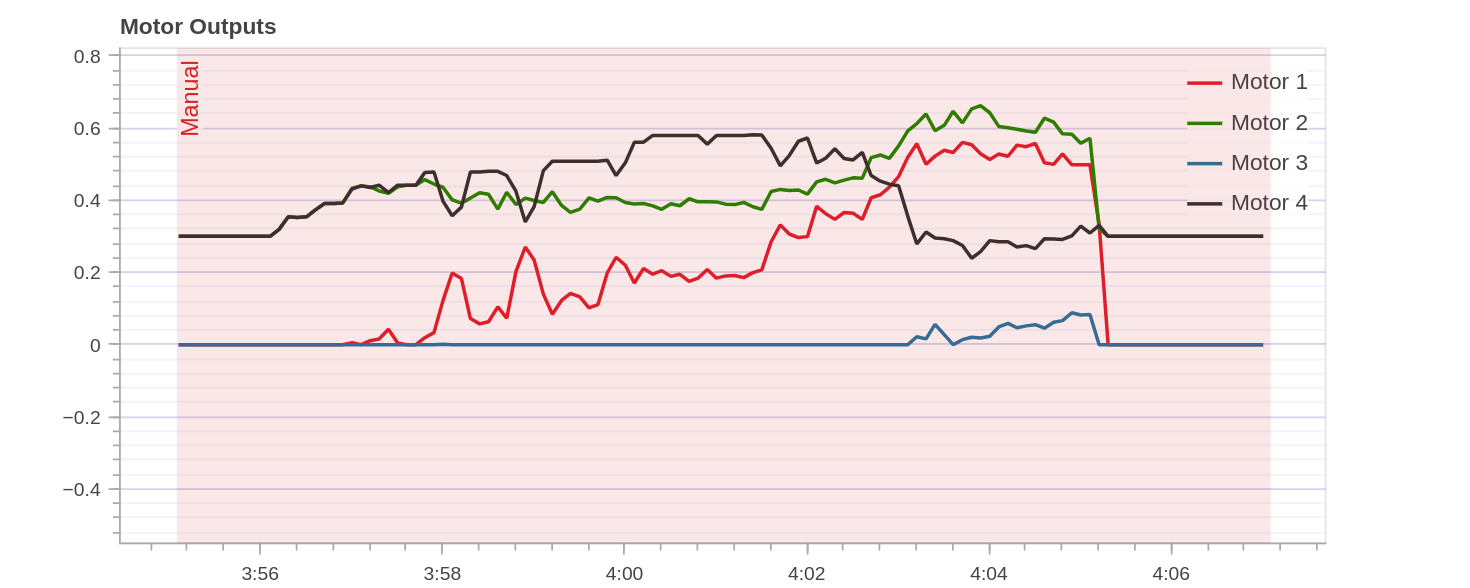
Motor actuator and ESC RPMs show that 1 motor (or ESC) spins up almost none. I can upload this data, but I dont seem to be able to attach to this post.I can buy a replacement motor from GetFpv. I assume I would need a quote for a Modal AI ESC?