@Eric-Katzfey Thanks for your reply.
That command returns -- No entries --, i think because I'm on a VOXL flight (m500) so there isn't a voxl-px4 service. Is there a way to view the px4 startup log on voxl?
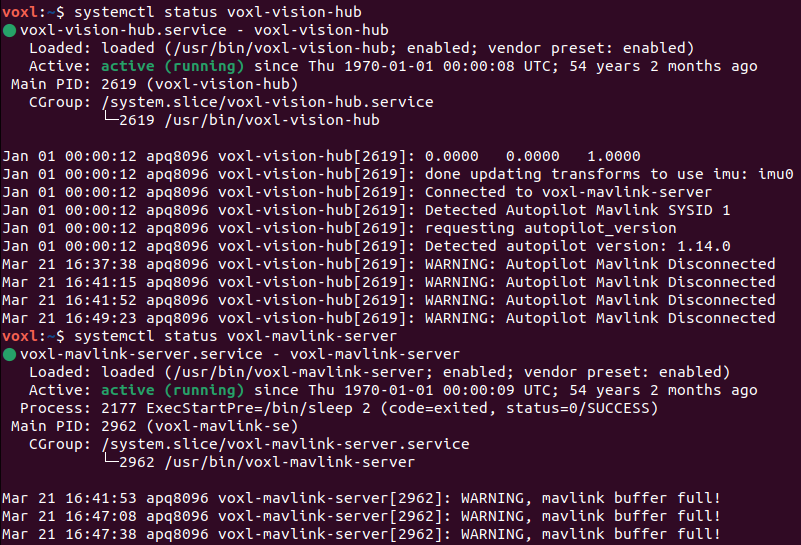
Also, I ran voxl-configure-mpa to reset the services, but the status log for voxl-mavlink-server shows that the mavlink buffer is full, as shown below. I don't understand why this would be happening when all the services should be in the default state, but maybe this is causing my problem of QGroundControl not recognizing the controller?
 jou
jou
Output of journalctl -b -u voxl-vision-hub :
-- Logs begin at Thu 1970-01-01 00:00:04 UTC, end at Thu 2024-03-21 14:17:14 UTC. --
Jan 01 00:00:08 apq8096 systemd[1]: Started voxl-vision-hub.
Jan 01 00:00:08 apq8096 voxl-vision-hub[2366]: WARNING: voxl-mavlink-server does not appear to be running
Jan 01 00:00:08 apq8096 voxl-vision-hub[2366]: make sure it is enabled: systemctl enable voxl-mavlink-server
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: loading our own config file
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: =================================================================
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: Parameters as loaded from config file:
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: config_file_version: 1
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: MAVROS / MAVSDK
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: en_localhost_mavlink_udp 0
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: localhost_udp_port_number: 14551
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: VIO
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: en_vio: 1
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: vio_pipe: qvio
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: secondary_vio_pipe: ov
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: en_reset_vio_if_initialized_inverted: 1
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: vio_warmup_s: 3.000000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: send_odom_while_failed: 1
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: APQ8096-ONLY FEATURES
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: en_set_clock_from_gps: 1
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: en_force_onboard_mav1_mode: 1
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: en_reset_px4_on_error: 1
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: MISC FEATURES
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: horizon_cal_tolerance: 0.500000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: OFFBOARD MODE
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: offboard_mode: figure_eight
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: follow_tag_id: 0
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: figure_eight_move_home: 1
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: robot_radius: 0.300000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: collision_sampling_dt: 0.100000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: max_lookahead_distance: 1.000000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: FIXED FRAME RELOCALIZATION
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: en_tag_fixed_frame: 0
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: fixed_frame_filter_len: 5
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: en_transform_mavlink_pos_setpoints_from_fixed_frame:0
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: COLLISION PREVENTION (VOA)
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: en_voa: 1
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: voa_upper_bound_m: -0.150000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: voa_lower_bound_m: 0.150000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: voa_memory_s: 1.000000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: voa_max_pc_per_fusion: 100
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: voa_pie_min_dist_m: 0.250000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: voa_pie_max_dist_m: 20.000000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: voa_pie_under_trim_m: 1.000000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: voa_pie_threshold: 3
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: voa_pie_slices: 36
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: voa_pie_bin_depth_m: 0.150000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: voa_send_rate_hz: 20.000000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: voa_input #0
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: enabled: 1
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: type: point_cloud
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: input_pipe: dfs_point_cloud
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: frame: stereo_l
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: max_depth: 8.000000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: min_depth: 0.300000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: cell_size: 0.080000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: threshold: 4
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: x_fov_deg: 68.000000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: y_fov_deg: 56.000000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: conf_cutoff: 0
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: voa_input #1
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: enabled: 1
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: type: point_cloud
Jan 01 00:00:07 apq8096 systemd[1]: Starting voxl-mavlink-server...
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: collision_sampling_dt: 0.100000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: conf_cutoff: 125
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: voa_input #4
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: enabled: 1
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: type: rangefinder
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: input_pipe: rangefinders
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: frame: body
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: max_depth: 8.000000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: min_depth: 0.300000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: cell_size: 0.080000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: threshold: 4
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: x_fov_deg: 68.000000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: y_fov_deg: 56.000000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: conf_cutoff: 0
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: =================================================================
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: loading extrinsics config file
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: loading horizon cal file
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: starting geometry module
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: starting autopilot monitor
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: starting mavlink IO
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: Waiting to connect to voxl-mavlink-server
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: starting fixed pose input
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: starting vio manager
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: starting tag manager
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: starting voa manager
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: starting horizon cal module
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: starting offboard figure eight
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: Init complete
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: Connected to VIO pipe: qvio
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: Geometry module updating to use imu: imu0 for VIO
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: new T imu wrt body:
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: 0.0200 0.0140 -0.0080
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: new R imu to body:
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: 1.0000 -0.0000 0.0000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: 0.0000 1.0000 -0.0000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: 0.0000 0.0000 1.0000
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: done updating transforms to use imu: imu0
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: Connected to voxl-mavlink-server
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: Detected Autopilot Mavlink SYSID 1
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: requesting autopilot_version
Jan 01 00:00:11 apq8096 voxl-vision-hub[2366]: Detected autopilot version: 1.14.0
Mar 21 14:18:09 apq8096 voxl-vision-hub[2366]: WARNING: Autopilot Mavlink Disconnected
Mar 21 14:18:11 apq8096 voxl-vision-hub[2366]: WARNING: Autopilot Mavlink Disconnected
Mar 21 14:19:08 apq8096 voxl-vision-hub[2366]: WARNING: Autopilot Mavlink Disconnected
Thanks so much for any help.