Oh thank you! I will try to flash this new image.
Thanks for the fast response.
A
Latest posts made by Alfonso Ponce
-
RE: Problems updating voxl-suiteposted in Ask your questions right here!
-
Problems updating voxl-suiteposted in Ask your questions right here!
Hi!
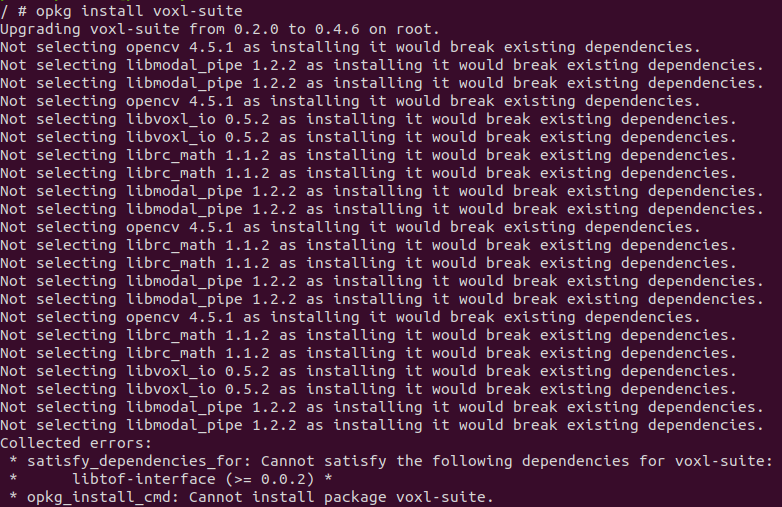
I'm trying to update voxl-suite. I've already installed the latest system image and the latest voxl-suite is somewhere in the voxl system along with the old version but I don't know how to use the new version instead of the old one. I tried using "opkg install voxl-suite" but it returns me this error: "libtof-interface (>= 0.0.2)" and also it says that none of the packages can be installed because installing it would break existing dependencies. What is libtof-interface an how can I update it? I will attach screenshots from the outputs.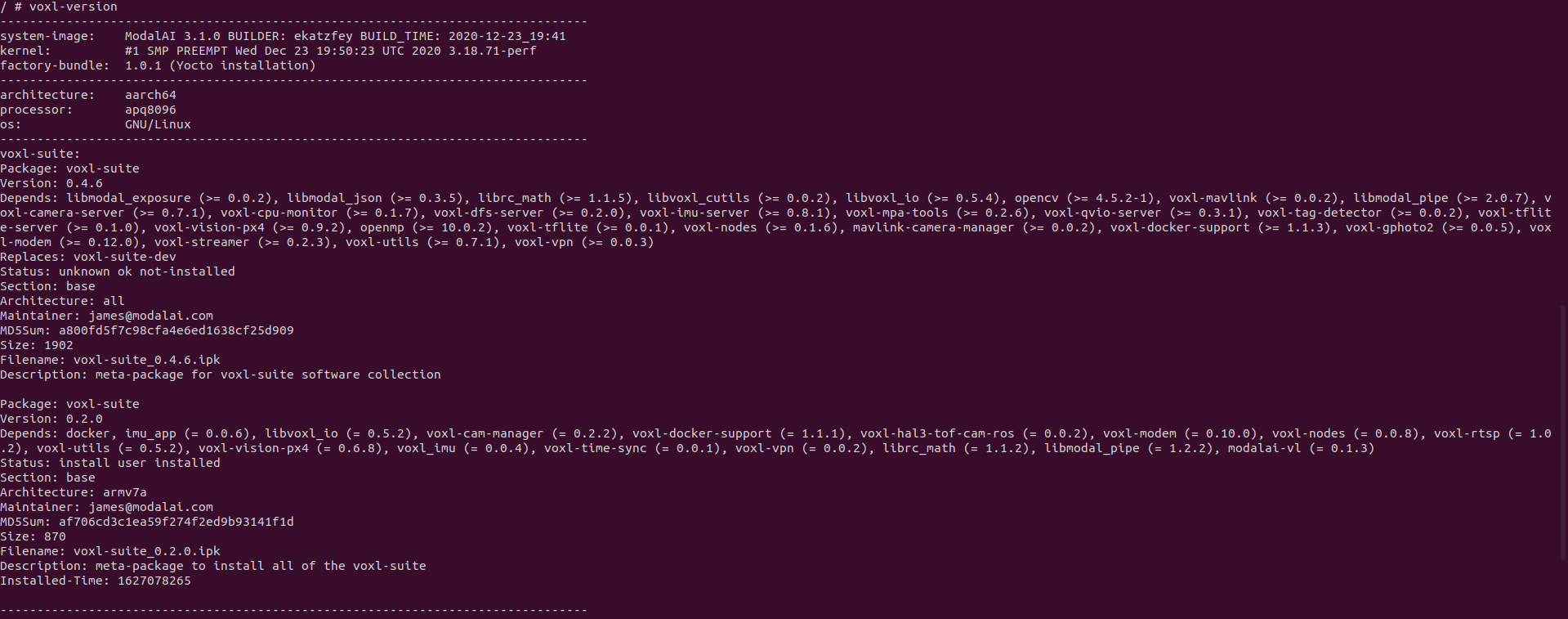
Thank you!
-
Python, OpenCV, MAVLink, Docker, and cameras how to use all?posted in VOXL m500 Reference Drone
Hello! So I work on a ModalAI m500 developement drone. I've used Docker to run python programs along with MAVSDK. My next goal is to create a program that detects faces or AprilTags or any specified object and make the drone follow it while the object/person moves, however I don't know how to stream what the camera sees into my Pyhton program using OpenCV. Considering my program is running inside a Docker, how can I get real time images from any of the cameras on the drone, make the stream get into the Docker, make the Python program get that stream, process it and make the drone react to the processing output?
Thank you!
-
Follow a moving apriltag (part 2)posted in Ask your questions right here!
I've been investigating on how to make the m500 follow a moving apriltag. I can see that there are different ways to approach this, I just don't want to re-invent the wheel by trying to achive this. Someone in the developer team told me to start by making some code of my own based on the "off-board mode follow tag" file in voxl-vision-px4. I can see that it is a code written in C, how can I run it? Do I have to use a specific Docker container? I noticed it is part of something called Modal Pipe Architecture, something I don't quite understand. Is this already something inside the VOXL right out of the box or do I have to install it? How can I use the ability of VOXL to detect Apriltags and do precision landings right out of the box but follow instead of landing?
Sorry for all my questions at once

-
Follow a moving apriltagposted in Ask your questions right here!
Can VOXL (specifically the m500 drone) follow a moving apriltag? I've seen the documentaion for precision landing and all the questions regarding that in this forum but I haven't seen anything regarding a moving apriltag even though the config file shows a field named "follow_tag_id".
-
RE: How am I able to change from WiFi to LTE connection?posted in Ask your questions right here!
You were right, this is what I get if I remove the daemon:
And then it begins again with the NOTE line
Then I changed the SIM card for another one, and then I got a new line. The first TLS line was different, it did get something this time:
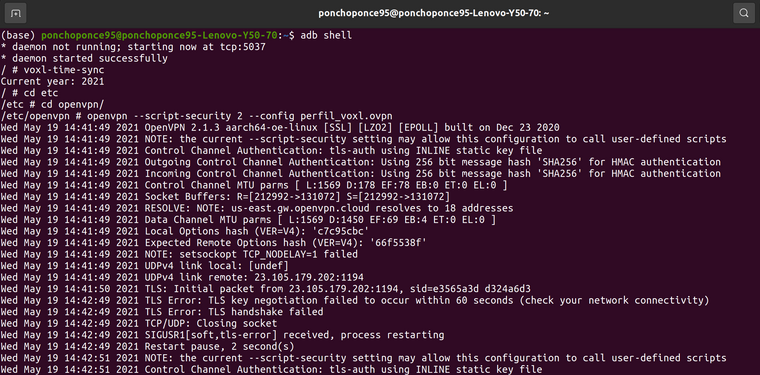
But then it failed and tried the connectione again.
This is regarding the VPN connection but how do I even know if the LTE connection was succesful? And then, if it was, how do I tell VOXL to choose between WiFi and LTE?
Thank you!
-
RE: How am I able to change from WiFi to LTE connection?posted in Ask your questions right here!
It was in Station Mode. I was able to make it connect automatically again by using the configuring wizard to connect it to QGC all over again, but now I don't know if the drone is connected to QGC over WiFi or over LTE. I'm not even sure if the VPN is working in the drone. I'm currently using OpenVPN Cloud service, which I think is not the same as setting OpenVPN in a regular server. I downloaded the .ovpn file for the drone and my computer (first I used the same .ovpn file for both, then I made another one for my PC, nothing changed though). What I'm doing is:
1.- I start QGC
2.- I turn on the drone
3.- They connect automatically over WiFi station mode
4.- I activate the VPN on my PC (by doing that the connection between QGC and the drone keeps running but now I don't have acces to the Internet).
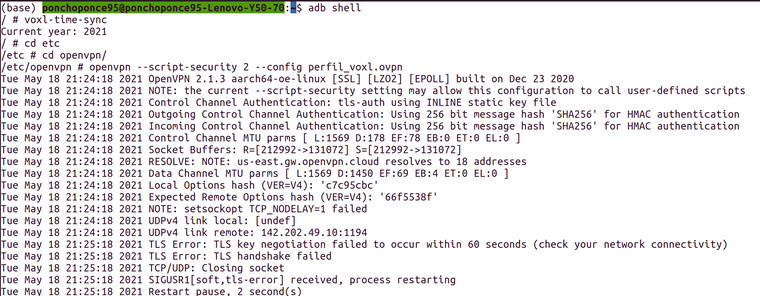
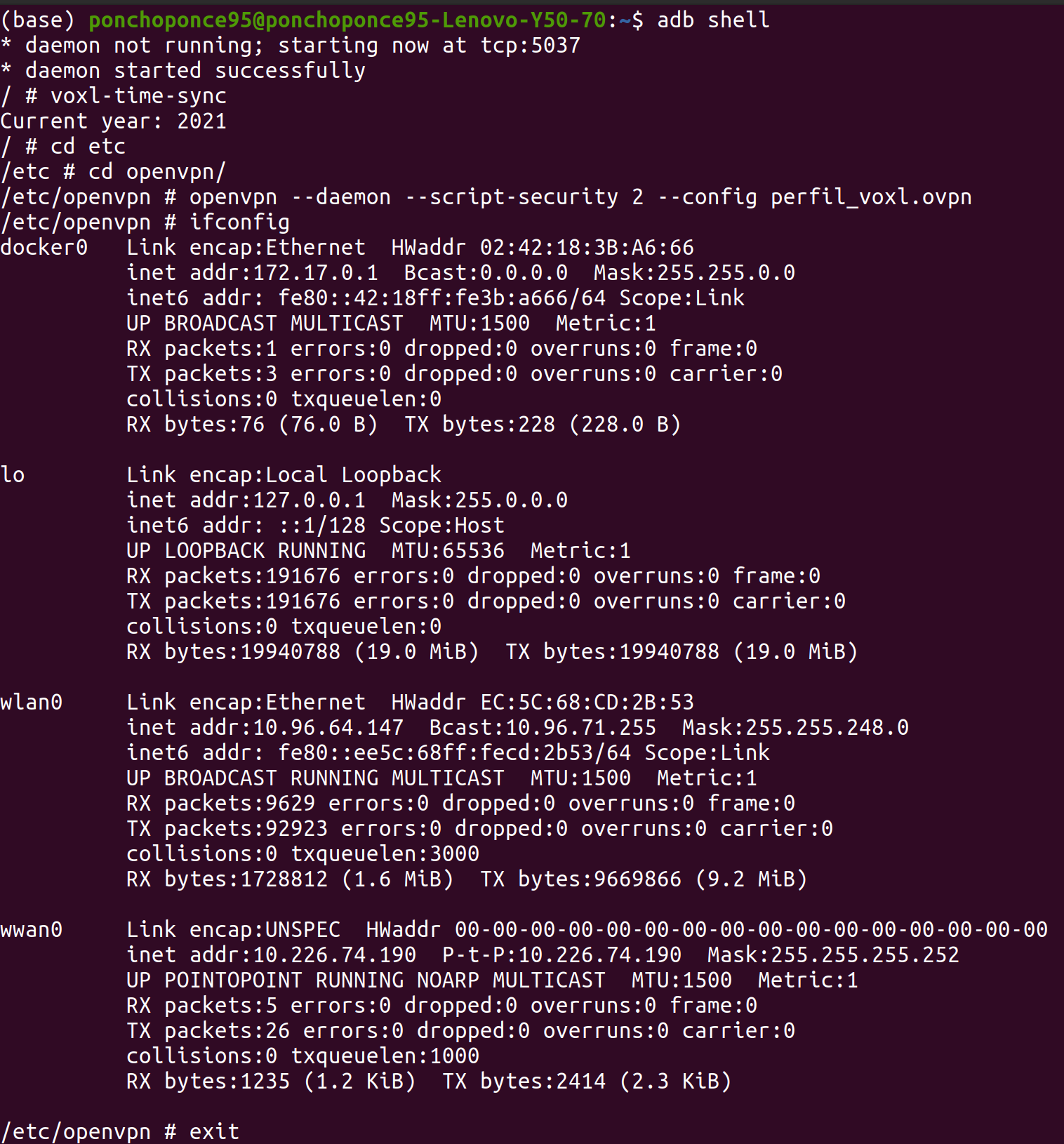
5.- I enter the drone's shell using ABD, I start the voxl-time-sync script, I move to the openvpn directory where the .ovpn file is and run it using:openvpn --daemon --script-security 2 --config vpn-key.ovpnThe file name obviously being my .ovpn file. But then nothing happens, the connection with QGC is still active, but then again, how do I know if it is connected over LTE (using the VPN) or over WiFi?
Here's a screenshot of the evidence of what I'm doing:
-
How am I able to change from WiFi to LTE connection?posted in Ask your questions right here!
I already installed a SIM card and configured it but now my m500 doesn't connect to QGroundControl over WiFi because, I think, the SIM card configuration automatcally made the drone connect over LTE each time it starts up. I haven't configured a VPN server nor anything to make the dron connect to QGroundControl over LTE yet, but is there a way to easy switch from WiFi to LTE?
-
RE: How to copy your MAVSDK Python Docker container and edit the files?posted in Ask your questions right here!
@Voxlady Thank you! In the end I was finally able to understand better how the VOXL shell and the Docker image/container were working together. I was able to mount the volume just like they recommended and I could send my .py files and execute them.