Hello, @Nicolas-Brissonneau:
I am trying to do the same thing as you and am stuck with the same problem. Did you manage to solve it?
Hello, @Nicolas-Brissonneau:
I am trying to do the same thing as you and am stuck with the same problem. Did you manage to solve it?
Hello everyone:
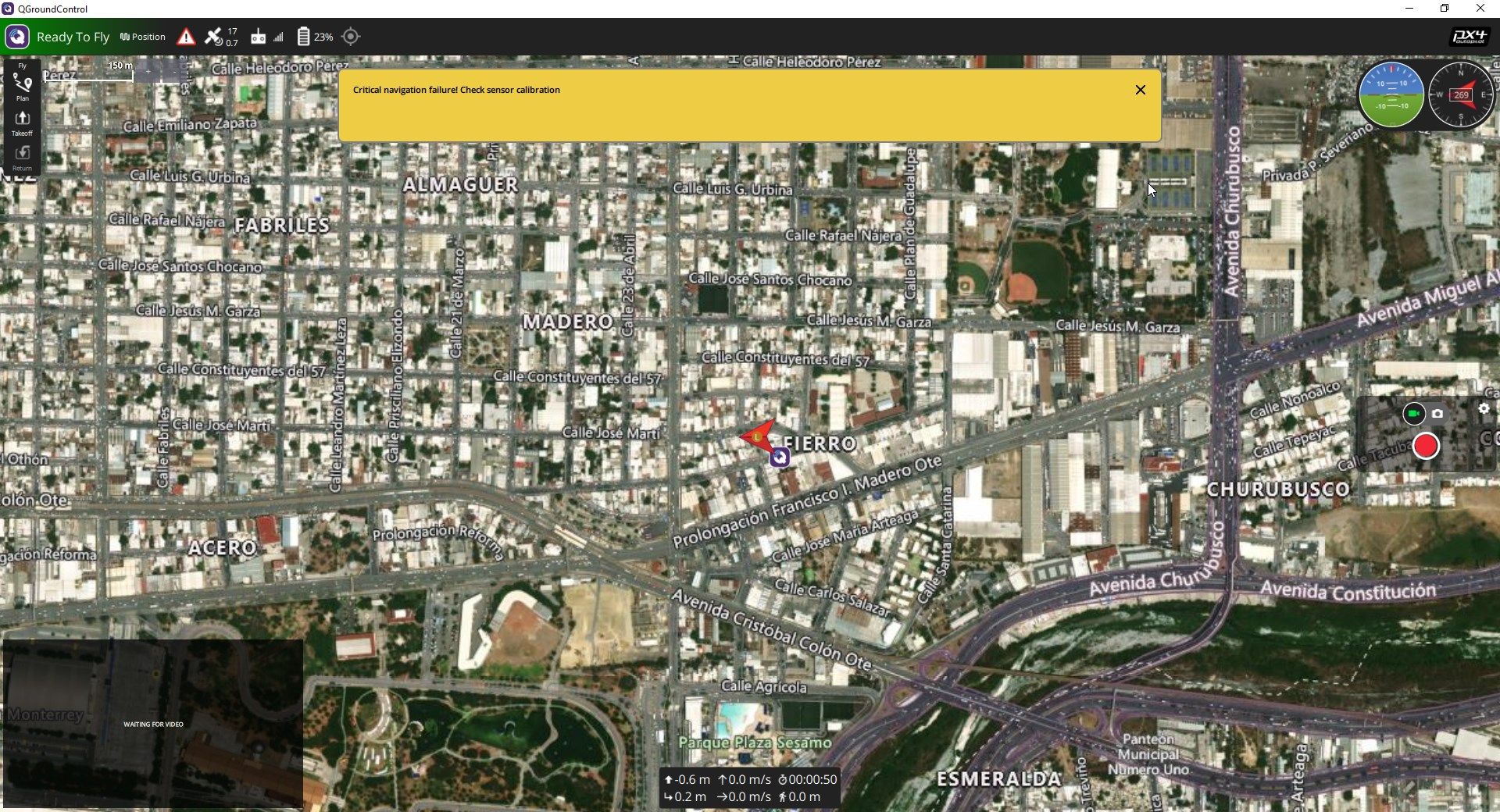
We've recently ran into an issue when flying with the VOXL 2 flight deck and using vision for position control. The aircraft goes into position mode while on the gorund and can take of with no problems, but once it is in the an error reading Critical Navigation Error pops up and the aircraft goes into failsafe mode and starts to drift. Below is a screenshot of the QGC screen and here you can see a flight video. The aircraft looses position at arounf the 00:00:17 mark. Up until yesterday we had been flying with no probles using this setup, any idea of what could be causing this?
Hello everyone!
I am planning on carrying out outdoor missions with GPS using the VOXL 2 flight deck. I`ve been using the tag detection algorithm to do precession landings while using VIO navigation and offboard mode through MAVSDK. I am not interested in having VIO enabled for outdoor flight, but I'd like to keep the tag tracking functionality available. I ran into this article: this documentation page that talks about using both GPS and vision based navigation. Would following this procedure allow to use GPS for a waypoint mission and then use tag detection and offboard mode to do precission landing?
Thanks in advanced for the answer ")
Hello everyone:
I am planning on adding a gimbal for my drone for that I would need either another serial port or PWM capabilities. I found this I/O board for the VOXL 2. I wanted to know if this could be used to control a gimbals using PX4 using the PWM outputs. I read the docs and it seems to plug into the J19 connector where the GPS and spektrum receiver plug in on the flight deck. Could I modifiy the connector to use this board alongside the GPS as I can connect the receiver to the expansion board?
Thanks in advanced
Hello @Zachary-Lowell-0 !
So, if I understood correctly I can record HD video and save it onboard to watch it later but right now it is not possible to stream it for a live view without killing the refresh rate, right?
Hello, everyone:
I am trying to upgrade the camera resolution on the VOXL2 Flight Deck to stream HD video to the ground. As I do not use them I am planning on substituting either the stereo cameras or the hires one for one capable of recording in HD. I was considering buying this camera but it seems to be made for the VOXL and I am not sure if it be compatible with the VOXL2. Would this be a viable option or are there better alternatives for the VOXL2.
Thanks in advanced
Hello Mr. Sweet:
I am interested in a HD camera for the VOXL2, is this solution already available?
Hello, @Alex-Kushleyev:
Are the esc-tools already a part of the VOXL2 software or do I still need to get a UART to USB converter for the calibration?
Hello, @Nicolas-Brissonneau:
I am trying to do the same thing as you and am stuck with the same problem. Did you manage to solve it?
Thanks, but I was referring if there is something already built in to do this task. IN the docs you guys have a VOXL MPA to ROS. Is this feature still planned?
Hello, everyone:
I have the VOXL 2 Flight Deck and am interested in doing a precision landing applications for outdoor flight. So, I'd like to take off run a QGC mission based on GPS way points and then return to the take-off coordinates and precision land using a April/ArUco tag. I checked the docs and learnt about the april-tag detector service as well as the ROS integration through voxl-map-to-ros-node. I can use MAVROS to load and carry out the mission, but the topics publish by the voxl ROS node do not include the April tag detection output. I wanted to know if there is there a way to take the MPA output and make it a ROS topic? or if there is a more obvious way to do something like this that I am missing?
Thanks in advanced