VOXL not connecting to QGC
-
@stevet I haven't yet had any flight with VIO.
I wanted to have my pipeline ready for trying out my path planning algorithm for which I need mavros running.
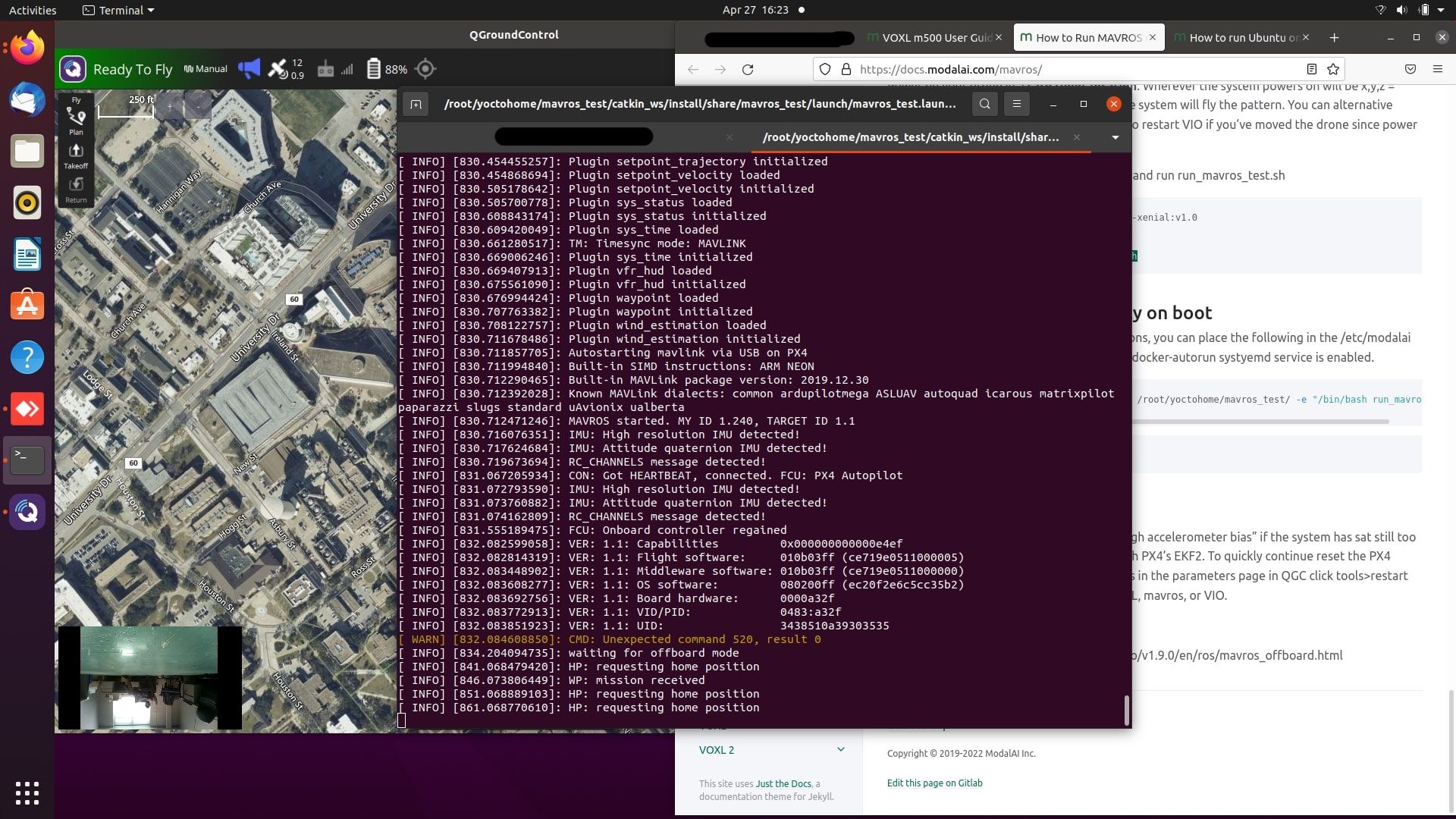
PX4 EKF2_AID_MASK value is set to 280. I have referred to helper parameters over here on my drone still facing issue of "HP: requesting home position" constantly on mavros launch file from roskinetic-xenial docker image.
Can you tag someone who has worked with mavros in order to support this issue? We are kindoff stuck with this issue.
-
Apologies -- I don't work for ModalAI. Just another dev leveraging Modal's kit.
")
Someone I'm sure will chime in from the team. Maybe @James-Strawson?
I would definitely make sure you can fly with VIO prior to jumping in with MAVROS. (https://docs.modalai.com/mavros/#prerequisites) VIO running in
voxl-vision-px4will establish the home position. Do you have PX4 in offboard mode?https://gitlab.com/voxl-public/voxl-sdk/services/voxl-vision-px4/-/blob/master/src/offboard_trajectory.c#L280 Also shows that you need to have VIO running and sending a home sent point so PX4 can send that for MAVROS to receive and process in your code. Believe you also will need offboard mode set to
trajectoryin/etc/modalai/voxl-vision-px4.conf, But, I could be wrong... at a quick glance of https://gitlab.com/voxl-public/voxl-sdk/services/voxl-vision-px4/-/blob/master/src/vio_manager.c#L72 it appears that VIO does not send a home point so I think to establish one PX4 would have to detect a liftoff and start publishing its own based on the VIO data it was receiving vice one established by one of the trajectory modes. -

How can I set home position in mavros?
Hello everyone. How can I send home position from my fake gps module during initialization phase? I’m currently working in SITL mode in gazebo, and I have removed the gps joint from iris model so far so good. I also w…

Dronecode Forum | Open Source Drone Development (discuss.px4.io)
Maybe offers some options as well.
And PX4 docus on home position.
https://airsim-fork.readthedocs.io/en/latest/px4_sitl.html#setting-gps-origin -
@stevet Thank you so much for incredible insights into voxl-vision-px4 package as well as pointing to specific code which may be related to this issue.
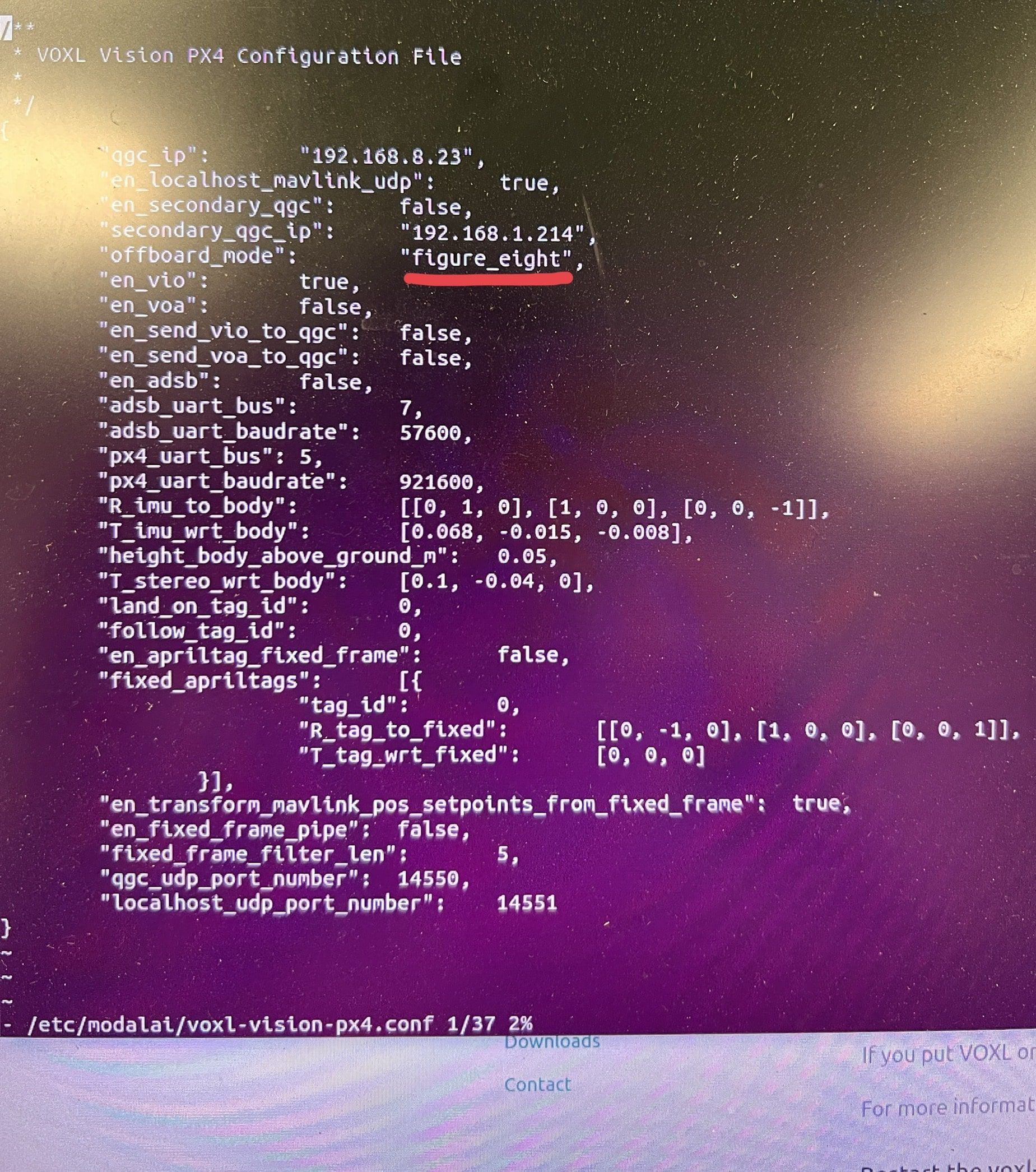
I changed offboard mode to "trajectory" in voxl-vision-px4.conf and tried running mavros with it still no luck. Still I face same issue of mavros requesting home position from PX4.
I dont know exactly when PX4 sends home position to mavros, as in when copter lifts off or even on ground. But still it would be worth a try to run mavros once copter is off the ground holding its position.
@James-Strawson Any inputs over here? Does PX4 publishes home position to mavros when qvio server is initialised and sending VIO to FCU. I guess it should since people generally must be using figure eight offboard example with mavros from ground which needs mavros to be taking in all setpoint_raw mavros topics inputs?
-
@stevet said in VOXL not connecting to QGC:
voxl-mavlink
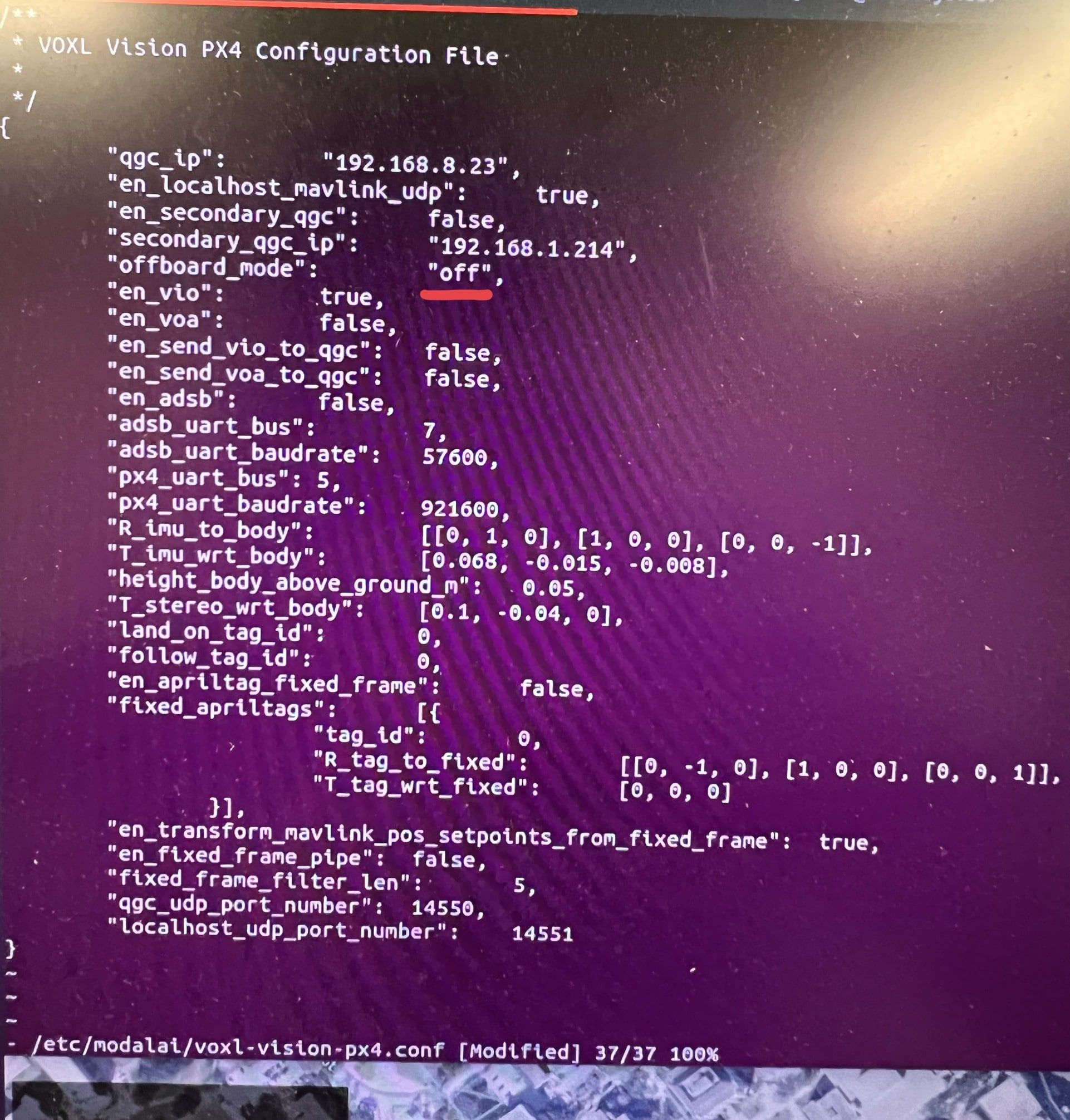
When using MAVROS the vvpx4 offboard_mode setting should be set to "off" since the figure 8 and trajectory modes let vvpx4 send offboard commands which would naturally conflict with offboard commands coming from MAVROS.
the "HP: requesting home position" message is perfectly normal, I've always seen it come up and it's never stopped me from running the mavros figure-8 example.
-
@stevet said in VOXL not connecting to QGC:
voxl-mavlink
When using MAVROS the vvpx4 offboard_mode setting should be set to "off" since the figure 8 and trajectory modes let vvpx4 send offboard commands which would naturally conflict with offboard commands coming from MAVROS.
the "HP: requesting home position" message is perfectly normal, I've always seen it come up and it's never stopped me from running the mavros figure-8 example.
@James-Strawson Can you please elaborate on setting vvpx4 offboard_mode "off" while using MAVROS. I am having a similar issue: my drone does not take off, and the screen displays "requesting home position" when I am running mavros_test.sh file.
If you can guide me through the steps of turning vvpx4 offboard_mode "off", that would be great. Thank You. -
@stevet said in VOXL not connecting to QGC:
voxl-mavlink
When using MAVROS the vvpx4 offboard_mode setting should be set to "off" since the figure 8 and trajectory modes let vvpx4 send offboard commands which would naturally conflict with offboard commands coming from MAVROS.
the "HP: requesting home position" message is perfectly normal, I've always seen it come up and it's never stopped me from running the mavros figure-8 example.
@James-Strawson I also set offboard_mode of vvpx4 to "off" while running mavros test and the drone still does not take off. I have also attached the pictures of what I changed.
-
@stevet said in VOXL not connecting to QGC:
voxl-mavlink
When using MAVROS the vvpx4 offboard_mode setting should be set to "off" since the figure 8 and trajectory modes let vvpx4 send offboard commands which would naturally conflict with offboard commands coming from MAVROS.
the "HP: requesting home position" message is perfectly normal, I've always seen it come up and it's never stopped me from running the mavros figure-8 example.
@James-Strawson Thank you for your response.
Even if I ignore "HP: requesting home position" I am not getting any data over /mavros/global_position/local topic which I think needs home position to be set correctly. Intention behind using /mavros/global_position/local is to have odometry in FLU frame which directly fits into most of the path planners for further work. Any inputs over here?
I did few more experiments but with no luck :
-
I have seen in some forums like this fake gps plugin in px4 can be used to set home position. This plugin is present in px4 plugin list but isnt active maybe.
-
I tried running rosservice call /mavros/cmd/set_home which always returns false in result which means it is failing. My qvio data is been forwarded to px4 and I can see it on QGC terminal as well.
Any thoughts on getting /mavros/global_position/local or /mavros/local_position/odom topics working?
-
-
@James-Strawson I also set offboard_mode of vvpx4 to "off" while running mavros test and the drone still does not take off. I have also attached the pictures of what I changed.
@parbat101 Probably you can try enabling "en_send_vio_to_qgc": true in your above shown config file? In my case I can arm drone in manual/position mode easily, just using mavros is the concern.
-
@parbat101 Probably you can try enabling "en_send_vio_to_qgc": true in your above shown config file? In my case I can arm drone in manual/position mode easily, just using mavros is the concern.
@Aks Thank you for your reply. My problem is also with MAVROS; it does not take off at last step and requests for home position. The drone (VOXL m500) takes off and I can control it flawlessly on manual and position flight mode.
I also enabled "en_send_vio_to_qgc" after your suggestion; the MAVROS flight did not work. It still does not take off in the MAVROS flight test. For manual mode and position flight mode, I did not have any problems.
I am not sure what is the problem with the MAVROS flight???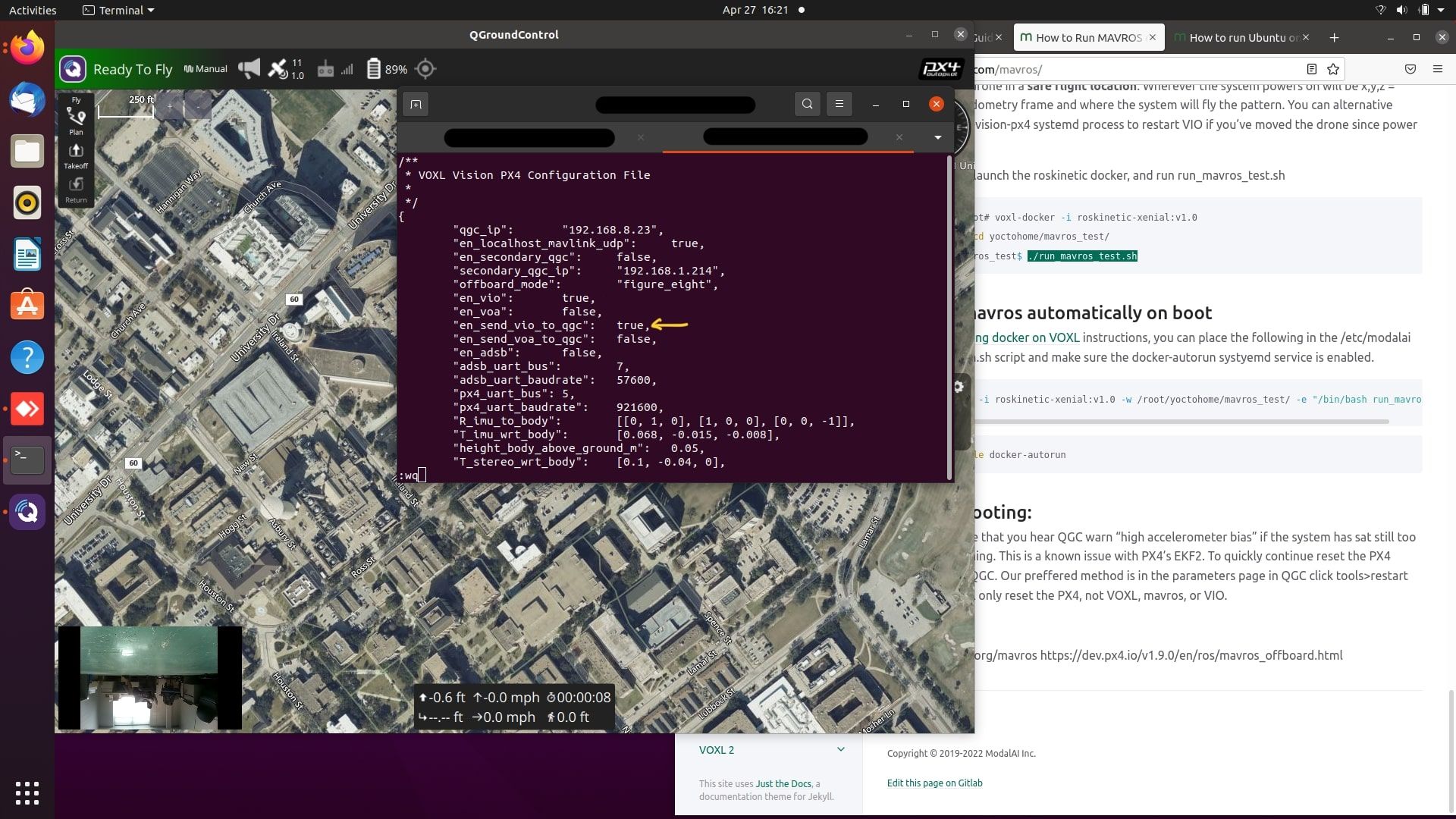
-
hey!@parbat101
Didi you figure out the way to set local position as home? If so please post it here, that would be helpful
thank you@Steve-Turner Hey please I need you help setting up ADB for my newly purchased VOXL CAM. I already started a discussion "Broken parts".
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login